

UP_nadezhnost_i_diagnostika
.Pdfотказов можно было бы выбрать наиболее вероятные и только для них предусмотреть СД в составе проектируемой системы. Однако на практике такая статистика может появиться только в условиях массового производства, что трудно предположить для сложных и зачастую уникальных информационно-управляющих систем. В этом же случае разработчик может рассчитывать лишь на опыт предыдущих разработок и свою интуицию. Можно пойти по пути, нередко используемому в теоретических исследованиях диагностических проблем, когда предполагают, что отказывать может всё. Конечно, этот путь может привести к затратным решениям. Так или иначе, но формирование перечня отказов, подлежащих диагностированию, должно предварять разработку СД.
Оценка достоверности средств диагностирования
Обладая перечнем отказов, подлежащих диагностированию, можно попытаться оценить качество разработанных СД, определив интенсивность необнаруживаемых отказов. Получение этой характеристики на практике обычно вызывает затруднения. Они минимальны, когда используется формальный метод, для которого существует математическое обоснование класса диагностируемых отказов. Напротив, они велики, если рассматривается какой-либо эвристический метод. В этом случае можно попытаться решить вопрос с помощью компьютерного моделирования задачи диагностирования, когда моделируется работа системы и ее СД при разных отказах и определяется доля необнаруживаемых отказов. Ниже будем предполагать, что необходимые характеристики СД так или иначе получены.
Для разных задач технического диагностирования используются разные характеристики достоверности. Обычно эти характеристики представляют собой вероятности событий, соответствующих правильным и ошибочным решениям о техническом состоянии. Так в задаче определения вида технического состояния при работоспособном состоянии системы СД могут принять правильное решение (система работоспособна) и неправильное решение (система неработоспособна). Аналогично при неработоспособном состоянии может быть правильное и неправильное решения. Вероятности этих состояний служат характеристиками СД. Понятно, что эти характеристики, соответствующие одному и тому же техническому состоянию, дополняют друг друга до единицы, а, значит, достаточно использовать одну характеристику из пары. Чаще используют вероятности ошибочных решений. Причем ситуация, когда бракуется работоспособная система, называется ошибкой первого рода, а ситуация, когда не бракуется неработоспособная система, называется ошибкой второго рода. Последняя характеристика наиболее часто используется на практике. При этом ее называют «неполнотой» СД. Определим для системы доли обнаруживаемых и необнаруживаемых отказов интенсивностями о и н.о соответственно,
причем интенсивность отказов системы равна: о н.о . Тогда неполнота СД определяется как отношение:
31
но .
Конечно, в общем случае СД, примененные в отношении разных устройств Уi некоторой системы, будут характеризоваться разной неполнотой αi. Тогда неполноту α СД для системы целесообразно определить как характеристику, осредненную по всем устройствам:
n |
|
|
|
|
|
i |
i |
, |
(4.1) |
|
||||
i 0 |
|
|
|
|
где λi - интенсивность отказов i-го устройства. В этом выражении отношение
i есть вероятность отказа i-го устройства при условии, что рассматриваемая
система отказала.
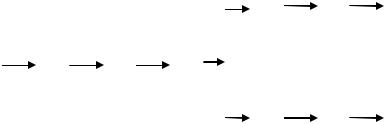
В задаче поиска места отказа пользуются понятием «глубина диагностирования», подразумевая под ним точность, с которой определяется местоположения отказа. По этой причине иногда вместо «глубины диагностирования» используют термин «точность диагностирования». При определении глубины диагностирования приходится учитывать два фактора. Первый и главный – это диагностическая (различающая) способность используемых СД, второй – конструктивные особенности системы (объекта диагностирования). Для обсуждения первого фактора необходимо ввести понятие эквивалентных отказов. Если говорить упрощенно, то два отказа считаются эквивалентными, когда поведение системы при наличии в ней любого из этих отказов одинаково. В результате по анализу поведения системы при любых входных последовательностях невозможно понять, какой из отказов присутствует в системе. На рис. 4.3 приведен пример, поясняющий это понятие. Здесь представлен фрагмент системы, состоящий из семи элементов. Для простоты будем считать, что элементы однотипны и представляют собой, например, усилители, а рассматриваемые отказы состоят в изменении их коэффициентов усиления. Фрагмент имеет один вход x и два наблюдаемых выхода y1 и y2. Нетрудно понять, что отказы усилителей 1, 2 и 3 эквивалентны между собой, как и эквивалентны между собой отказы усилителей 4
и 5, а также усилителей 6 |
|
|
|
|
|
|
|
|
|
|
|
y1 |
|||
|
|
|
|
|
|
|
|
4 |
|
5 |
|||||
|
|
|
|
|
|
|
|
|
|
||||||
и 7. Таким образом, мы |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
имеем три группы (класса) |
x |
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
2 |
|
3 |
|
|
|
|
|
|
|||||
эквивалентных отказов, |
и |
|
|
|
|
|
|
|
|
|
|||||
диагностирование |
может |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
осуществляться |
лишь |
с |
|
|
|
|
|
|
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
|
|
6 |
|
7 |
|||||
глубиной, |
определяемой |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
размерами |
этих |
классов. |
|
|
Рис. 4.3. Эквивалентные отказы |
|
|
||||||||
Заметим, |
что |
любые |
|
|
|
|
|
|
|
|
|
|
|
|
|
представители разных классов различимы между собой. Так, например, отказ 1 различим с отказом 4 или 6, а отказ 4 различим с отказом 6. При разработке процедур диагностирования необходимо принимать во внимание наличие
32
классов эквивалентных отказов, чтобы в случае, когда СД указывают, например, на отказ 1, понимать, что реально в системе может присутствовать отказ 2 или 3. Ясно, что состав и количество классов эквивалентных отказов будет изменяться при изменении набора используемых при диагностировании выходов. Так в пределе, если возможно наблюдение выхода каждого усилителя, число классов будет равно числу усилителей, а каждый класс будет включать лишь один отказ.
Измерять на практике глубину диагностирования рамками классов эквивалентных отказов весьма затруднительно, а на этапе эксплуатации системы зачастую, как это мы поймем чуть ниже, в этом и нет необходимости. Это связано с тем, что неразличимость конкретных отказов может быть вызвана не их эквивалентностью, а недостаточной развитостью используемых СД. Вполне может оказаться, что расширение используемого теста или добавление средств функционального диагностирования может сделать ранее неразличимые отказы различимыми. По этой причине глубину диагностирования на практике определяют числом конструктивных элементов, отказы которых не различаются используемыми СД. С точки зрения процедуры восстановления любая система состоит из некоторых «кирпичиков» – так называемых типовых элементов замены (ТЭЗ). Дубликаты ТЭЗов хранятся на объекте эксплуатации в так называемом ЗИПе (запасное имущество прибора) и извлекаются оттуда при восстановлении системы. При этом можно заменить лишь соответствующий ТЭЗ, но нельзя заменить только конструктивный элемент, входящий в ТЭЗ. В связи с этим на практике принято определять глубину диагностирования в ТЭЗах. Очевидно, что в общем случае одному ТЭЗу соответствует не один класс эквивалентных отказов. При этом совершенно не обязательно, чтобы границы каждого из этих классов оказались в пределах одного ТЭЗа. В результате при появлении отказа из такого «разорванного» класса процедура диагностирования должна подозревать все ТЭЗы, содержащие отказы этого класса. Типичным для практики требованием к СД системы является глубина диагностирования 1–2 ТЭЗ.
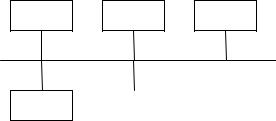
Таким образом, ясно, что глубина диагностирования определяется свойствами СД, а также конструктивными и функциональными особенностями конкретной системы. Путем анализа используемых СД множество ТЭЗов диагностируемой системы может быть разбито на группы ТЭЗов, отказы которых неразличимы между собой. Численность этих групп может быть неодинакова. На рис. 4.4 приведен иллюстративный пример разбиения ТЭЗов системы на группы, различимые примененными СД. Эти группы разделены штриховыми линиями. В данном случае таких групп четыре. Первая и четвертая группы содержат по четыре ТЭЗа (ТЭЗ11 – ТЭЗ14 и ТЭЗ41 – ТЭЗ44), вторая группа – два ТЭЗа (ТЭЗ21 и ТЭЗ22), третья – три ТЭЗа (ТЭЗ31 – ТЭЗ33). В результате при возникновении какого-либо отказа данные СД указывают на одну из четырех групп ТЭЗов, не уточняя, где конкретно находится отказ. Возникает вопрос, как в данном случае определить значение глубины диагностирования δ? Можно принять, что глубина
33
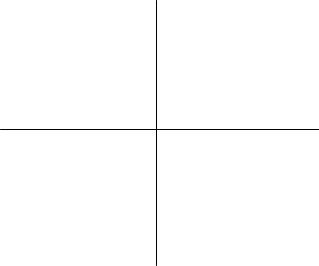
диагностирования равна наихудшему значению, т.е. четырем. Однако эту оценку нельзя принять полностью удачной, поскольку она не вполне отражает всю картину в целом. Ведь может оказаться, что отказы в устройствах наибольшей группы маловероятны и будут происходить редко, а чаще будут происходить отказы из меньших групп, и, значит, в среднем картина будет более благоприятной. Эти соображения свидетельствуют в пользу применения в качестве характеристик осредненных величин.
|
|
|
|
|
|
|
|
|
|
m |
|
j |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
, |
|
|
|
|
|
(4.2) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
j 0 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где λj - интенсивность отказов j-й |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
группы, λ – интенсивность отказов |
|||||||
|
|
ТЭЗ11 |
|
ТЭЗ12 |
|
ТЭЗ21 |
|
|
ТЭЗ22 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
системы. |
|
В |
|
этом |
выражении |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отношение |
|
j |
|
есть |
вероятность |
||
|
|
|
ТЭЗ13 |
|
ТЭЗ14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отказа j-й группы при условии, что |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рассматриваемая система отказала. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В задаче поиска места отказа |
|||||||
|
|
|
ТЭЗ31 |
|
|
|
ТЭЗ41 |
|
|
ТЭЗ42 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
так же, как и в задаче определения |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
технического состояния, в качестве |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
характеристик |
|
СД используются |
|||||
|
|
|
ТЭЗ32 |
|
ТЭЗ33 |
|
ТЭЗ43 |
|
|
ТЭЗ44 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вероятности |
|
правильных |
и |
||||||||
|
3 |
|
|
|
4 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ошибочных |
|
|
решений (обычно |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Рис. 4.4. |
|
Разбиение |
множества ТЭЗов |
|
|
|
|
ошибочных). Прежде |
всего, это |
- |
||||||||||||||
|
системы |
|
по |
|
результатам |
|
|
|
|
вероятность того, что в результате |
|||||||||||||||
|
диагностирования. |
|
|
|
|
|
|
|
|
|
|
|
поиска отказа в неработоспособной |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
системе |
принимается |
решение |
о |
||||
наличии отказа в данном устройстве (группе устройств) системы при условии, что этот отказ в данном устройстве (группе устройств) отсутствует.
Предварительно все отказы рассматриваемой системы разбиваются разработчиком СД на m групп так, что отказы, принадлежащие разным группам, различаются примененными СД, а отказы, принадлежащие одной группе, не различаются. При этом в каждой из полученных групп в общем случае могут находиться отказы более чем одного модуля. Указанное разбиение осуществляется в результате ручного или автоматического (путем моделирования) логического анализа работы системы совместно с СД при
всех рассматриваемых отказах. |
|
Методика оценки вероятности ошибки |
диагностирования |
сформулирована в предположении определенной процедуры восстановления, содержание которой определяется традиционным для практики требованием к глубине диагностирования – 1–2 ТЭЗ. При этом элементы замены, представленные в каждой j-й группе, упорядочиваются в порядке увеличения их надежности. Надежность i - го ТЭЗ в каждой j-й группе определяется значением интенсивности λji отказов. В случае если СД системы указывает на отказ из j-й группы, то осуществляется замена наиболее ненадежного ТЭЗ.
34
Если после замены прибор по-прежнему неисправен, то заменяется второй в этом списке ТЭЗ и т.д. При этом последовательная замена первых двух модулей считается допустимой, а трех и более - ошибкой диагностирования. В результате вероятность ошибки диагностирования элемента замены при условии, что отказ произошел в j-й группе, определяется отношением
|
|
|
|
1 |
j1 j 2 |
, |
(4.3) |
|
|
j |
j |
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
где j1 |
и j 2 |
- интенсивности отказов первого и второго ТЭЗ j-й группы, j - |
|||||
интенсивности отказов всех ТЭЗ из j-й группы.
Оценку для вероятности ошибки диагностирования в системе получаем путем осреднения по всем группам:
m |
|
j |
|
|
|
|
j |
(4.4) |
|
|
|
|||
j 0 |
|
|
||
Влияние средств диагностирования на надежность системы
Очевидно, что эффективность этих средств влияет на надежность системы, поскольку от их работы зависит своевременность проведения процедур восстановления. Не углубляясь в этот достаточно сложный вопрос, рассмотрим простейшие примеры. Сначала предположим, что система безызбыточна и восстанавливаема. Такую систему удобно характеризовать коэффициентом готовности K г (2.5). Очевидно, что эта характеристика
надежности учитывает влияние средств диагностирования, поскольку в выражение для ее вычисления входит среднее время восстановления. В свою очередь, время восстановления складывается из времени поиска отказа и времени ремонта. Понятно, что время поиска отказа является одной из характеристик используемых в системе средств диагностирования.
Теперь рассмотрим избыточную систему, в которой используется «холодное» резервирование. Пусть СД, используемые в системе, обнаруживают лишь часть отказов. Тогда надежность контролируемой части системы в случае «холодного» резервирования определяется выражением (2.2), а надежность неконтролируемой части выражением (1.7) для надежности нерезервированной системы. В результате надежность ps(t)
системы с несовершенными СД определяется произведением этих выражений
n 1 |
( |
о |
t)i |
|
ps (t) e t |
|
|
. |
|
|
|
|
||
i 0 |
|
i! |
||
Видно, что надежность такой системы может быть существенно ниже, нежели у системы с совершенными СД (2.2).
35
4.2.Математические модели объектов диагностирования
4.2.1. Модели безынерционных преобразователей
При построении средств диагностирования сразу встает вопрос об описании объекта или, как принято говорить, о его модели (математической модели). Модель потребуется в любом случае независимо от того, будем ли мы осуществлять процесс построения вручную или воспользуемся какимилибо автоматизированными средствами. Далее нам придется на языке выбранной модели описать рассматриваемые отказы. Всё вместе – модели объекта и отказов – иногда называют диагностической моделью объекта.
u1 |
|
|
y 0 |
Может оказаться, что средствами выбранной для |
||||
|
|
|||||||
|
описания объекта модели затруднительно или |
|||||||
|
|
|||||||
u2 |
|
|
|
даже |
невозможно |
описать рассматриваемые |
||
|
|
|
отказы. В этом случае придется изменить свой |
|||||
|
|
|
|
|||||
|
|
|
|
выбор в пользу другой модели объекта. |
||||
Рис.4.5. Схема |
логического |
Надо |
сказать, |
что |
многообразие возможных |
|||
моделей достаточно велико. Осуществляемый |
||||||||
умножения. |
|
|
||||||
|
|
разработчиком |
выбор из этого многообразия |
|||||
|
|
|
|
|||||
определяется не только свойствами объекта и предпочтениями разработчика, но и тем, насколько удобно с точки зрения последующего анализа в выбранной модели представляются рассматриваемые отказы. Если ставится задача автоматизации процедур разработки средств диагностирования, то на первый план выходит эффективность внутримашинного представления модели. При этом ее наглядность, важная для ручных методов, может пострадать. Рассмотрим сначала некоторые примеры моделей безынерционных устройств. Понятно, что любое реальное устройство инерционно, однако вполне может оказаться, что при диагностировании определенных отказов эта инерционность не существенна. Так обычно считают при диагностировании логических (комбинационных) схем. При этом при решении других задач в отношении логических схем могут применяться модели, учитывающие инерционность.
u1 |
|
|
|
|
u1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Σ1 |
|
|
|
|
|
|
|
|
|
u2 |
|
|
|
y |
u2 |
|
|
|
|
y |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
& |
||
|
|
|
Х |
|
|
|
|
|||
u3 |
|
|
|
|
u3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Σ2 |
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
б) |
||
u4 |
|
|
u4 |
|
|
|
||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
Рис. 4.6. Примеры аналогового (а) и цифрового (б) преобразователей.
36
Начнем с одной из самых очевидных и привычных инженеру моделей логической (цифровой) схемы – структурной (рис. 4.5). На рисунке представлена простейшая логическая схема, реализующая функцию конъюнкции или логического умножения. Схема имеет два входа u1 и u2 и
один выход y , на которых формируются двоичные сигналы {0, 1}. Чаще
всего, когда рассматривают вопросы диагностирования логических схем, отказы моделируют путем фиксации уровней сигналов на входах и выходах. Такую модель отказа называют константной. На рис. 4.5 предполагается, что в схеме отказал ее выход y . Причем значение выхода всегда (тождественно)
равняется нулю. Заметим, что при обсуждении этой модели мы неявно предполагали, что нам известна функция элемента. Безусловно, при использовании формальных алгоритмов синтеза средств диагностирования мы должны располагать библиотекой функций элементов.
На рис. 4.6 представлены два примера аналогового (а) и цифрового (б)
u1 |
|
|
u1 |
u2 |
y |
|
|
|
|
& |
|
|
|
|
|
|
u1 |
|
|
u2 |
|
а) |
|
|
|
|
|
|
|
u1 |
y |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
u2 |
|
|
u2 |
|
|
|
б) |
|
|
u1 |
|
|
|
|
& |
|
|
u1 |
u |
|
|
|
|
2 |
|
1 |
y |
|
|
|
|
|
|
|
|
|
|
u1 |
u2 |
& |
|
|
|
|
u2 |
|
в) |
|
|
u1 |
|
|
u1 |
u3 |
1 |
|
|
||
|
|
|
|
|
u2 |
& |
y |
|
|
|
|
|
|
|
u3 |
|
|
u2 |
u4 |
1 |
|
|
||
|
|
|
|
|
u4 |
|
г) |
|
|
|
|
|
|
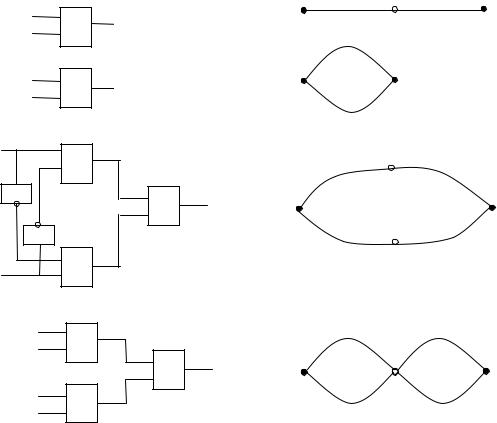
Рис. 4.7. Структурная и графовая модели логической схемы.
функциональных преобразователей, реализующих в определенном смысле похожие функции соответственно:
y ((u1 u2 )(u3 u4 )) и y ((u1 u2 ) & (u3 u4 )) .
Каждый из преобразователей представляет собой комбинацию сумматоров и умножителя (аналоговых или цифровых). В этих выражениях
37

скобками ограничены функции, отдельных элементов, что позволяет соотносить отказы в схеме с их отображением в формуле.
Упомянем для логического преобразователя еще одну, по-видимому, самую наглядную модель. Ее принято называть графовой. Она представлена на рис. 4.7. Заметим, что и машинное представление этой модели весьма компактно. Модель может рассматриваться как двухполюсный контактный эквивалент логической схемы. Полюса на рисунке отмечены зачерненными кружками. Любой путь между полюсами (последовательность ребер без повторений) соответствует входному набору (наборам), на котором логическая функция равна единице, любое сечение графа (набор ребер, разрывающий все пути между полюсами) соответствует входному набору (наборам), на котором логическая функция равна нулю. На рис. 4.7 приведены графовые модели для конъюнкции (а), дизъюнкции (б), исключающего ИЛИ (полусумматора) (в) и чуть более сложной логической схемы из трех элементов и с четырьмя входами (г). Видно, что конъюнкция представляется последовательными ребрами, дизъюнкция – параллельными, а схемы на рис. 4.7 в и г – композицией последовательных и параллельных подграфов.
Интересно проанализировать, как отображаются на графовой модели константные отказы (рис.4.8). Оказывается, то отказы типа ( 1) – тождественная единица – отображаются на графовой модели в виде короткого замыкания ребер, при котором соединяемые этим ребром вершины объединяются, а отказы типа ( 0 ) – тождественный нуль – в виде обрыва ребер.
|
u3 |
u1 |
u3 |
u1 |
|
u4 |
|
u2 |
u4 |
u2 |
|
|
а) |
б) |
|
|
u3 |
u1 |
|
|
|
|
|
u1 |
|
u4 |
|
|
u4 |
u2 |
|
|
|
|
в) |
г) |
|
Рис. 4.8. Отображение константных отказов на графовой модели.
38

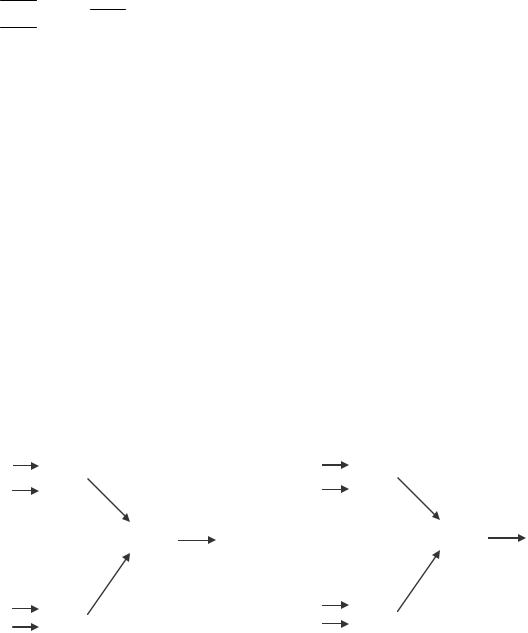
4.2.2. Динамические модели
Модели средств автоматики. Без преувеличения можно сказать, что динамическая модель устройства является самой распространенной при решении задач технической диагностики и применяется она, прежде всего,
|
|
|
|
|
|
|
|
для |
описания |
средств |
|
автоматики. |
||||
u |
|
|
|
δ |
|
|
y |
Стремление |
использовать |
динамические |
||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
модели связано с тем, что в большинстве |
||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
случаев разработчик, как бы ему не хотелось |
||||||||
|
|
|
|
|
|
xk+1 |
упростить |
задачу, |
вынужден |
учитывать |
||||||
|
|
|
|
φ |
|
|||||||||||
|
xk |
|
|
инерционность |
|
|
рассматриваемого |
|||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
устройства. Для отражения инерционности |
||||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
устройства в его модель включают элементы |
||||||||
|
|
|
|
|
|
|
|
задержки и памяти, интеграторы, и при |
||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
описании обычно вводится вектор состояния |
||||||||
|
|
|
|
|
|
|
|
x . |
|
|
|
|
|
|
|
|
|
Рис. 4.9. Модель конечного |
|
Если |
устройство |
– |
цифровое, |
то |
|||||||||
|
автомата. |
|
|
|
используется модель |
конечного автомата |
||||||||||
|
|
|
|
|
|
|
|
(рис. 4.9), |
включающая |
два |
логических |
|||||
преобразователя |
- уравнение динамики (функция переходов) φ и уравнение |
|||||||||||||||
измерений (функция выходов) δ: |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
xk 1 (xk , uk ) , |
|
yk |
(xk , uk ) |
(4.5) |
|||
и элементы задержки для вектора состояния. Выше в скобках указаны термины, используемые в теории автоматов.
Если объект аналоговый, то используются дифференциальные уравнения, которые, например, в случае линейных объектов имеют вид:
x(t) F x(t) Gu(t), |
y(t) H x(t), |
(4.6) |
где x, u, y - векторы состояния, входа и выхода, |
а F – (n x n)-матрица |
|
динамики, G – (n x p)-матрица входа, H – (m x n)-матрица выхода объекта. Наряду с дифференциальными уравнениями может использоваться
передаточная функция [5]: |
|
|
|
|
W (s) |
B(s) |
. |
(4.7) |
|
|
||||
|
A(s) |
|
||
В случае нелинейных объектов дифференциальные уравнения |
||||
становятся нелинейными: |
|
|
|
|
x(t) ( x(t), u(t)), |
y(t) h( x(t)), |
(4.8) |
||
где , h - нелинейные функции динамики и выхода объекта.
Если объект - дискретный, то вместо дифференциальных применяются либо линейные:
xk 1 F xk Guk , |
yk H xk . |
(4.9) |
либо нелинейные разностные уравнения:
xk 1 ( xk , uk ), |
y(к) h( xk ). |
(4.10) |
39
Приведем примеры динамических моделей, которые заимствованы из работ [5, 21] и которые будут использованы в дальнейшем для иллюстрации описываемых методов диагностирования.
Пример 4.1. Управление водяной торпедой.
Рассмотрим в качестве примера модель водяной торпеды, описываемую нелинейным уравнением:
J C1 C2 C3 sign( ), y ,
где J – момент инерции торпеды, – угол поворота торпеды.
Пример 4.2. Контур управления самолетом.
Рассмотрим пример системы, заимствованный из работы [21],
характеризующийся матрицами: |
|
|
|
|
|
||||
0,0061 |
0,5122 |
0,0579 |
0,029 |
0,0377 |
|
|
|||
0,5122 |
0,1868 |
0,6803 |
0,1417 |
0,2028 |
|
||||
|
|
|
|
|
|
|
|
|
|
F 0,0579 |
0,6803 |
0,7645 |
0,7531 |
0,8508 |
, |
|
|||
|
|
|
|
|
|
|
|
|
|
|
0,29 |
|
0,1417 |
0,7531 |
0,3258 |
0,5974 |
|
||
|
|
|
0,2028 |
0,8508 |
0,5974 |
1,242 |
|
|
|
0,0377 |
|
|
|||||||
|
0,0452 |
|
|
|
|
|
|
|
|
|
0,2335 |
|
|
|
|
|
|
|
|
|
|
H 0,0452 |
|
|
|
|
0,1329 |
||
G |
0,2779 |
, |
0,2334 0,2779 |
0,09743 |
|||||
|
|
|
|
|
|
|
|
|
|
0,09742 |
|
|
|
|
|
|
|
||
|
0,1329 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По смыслу данная система представляет собой редуцированную модель контура управления самолетом по высоте, которая была получена линеаризацией уравнений движения самолета в окрестностях номинальной траектории. Это описание охватывает управляемый объект, сервопривод управления рулем, датчик высоты и регулятор.
Модель обмена в распределенной Σ Σ
1 2
информационно-управляющей системе.
Ниже рассматривается нетрадиционный пример применения динамической модели
[19] |
для |
описания |
обменов |
в |
СД |
|
|
|
|
||
|
КК |
|
|
||||||||
распределенной |
|
информационно- |
|
|
|
||||||
|
|
|
|
|
|
||||||
управляющей системе. Он демонстрирует |
Рис. |
4.10. |
Структура |
||||||||
широкий диапазон приложений для этой |
|||||||||||
модели. Эта модель позволит нам при |
информационной |
системы |
с |
||||||||
централизованным |
управлением |
||||||||||
необходимости |
|
решать |
задачу |
обменом. |
|
|
|
|
|||
диагностирования |
всей |
информационно- |
|
|
|
|
|
||||
40