

000014
.pdfпространственной системы сил. При ее решении учесть, что реакция сферического шарнира (подпятника) имеет три составляющие (по всем трем координатным осям), а реакция цилиндрического шарнира (подшипника) — две составляющие, лежащие в плоскости, перпендикулярной оси шарнира
(подшипника). При вычислении момента силы F часто удобно разложить ее на две составляющие F' и F", параллельные координатным осям (или на три); тогда,
по теореме Вариньона, mx(F) = mx(F') + mx(F") и т.д.
Рис. C4.0 |
Рис. C4.1 |
a
Рис. C4.2 |
Рис. C4.3 |
Рис. C4.4 |
Рис. C4.5 |
21
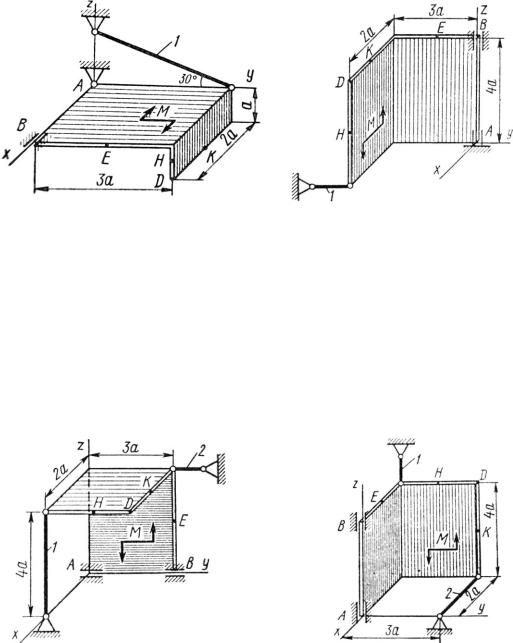
Рис. C4.6 |
Рис. C4.7 |
Рис. C4.8 |
Рис. C4.9 |
22
|
|
|
|
|
|
|
Таблица С4 |
||
|
|
y |
z |
|
z |
y |
|
y |
|
|
1 |
F2 |
|
3 |
|
|
|||
|
|
|
|
|
4 |
||||
|
|
|
|
|
|
||||
|
|
|
2 |
|
|
|
|
||
|
|
F1 |
|
|
F3 |
F4 |
x |
||
Силы |
x |
x |
|
|
|||||
|
|
|
|
|
|
|
|||
|
F1 = 10 кН |
F2 = 20 кН |
F3 = 30 кН |
F4 = 40 кН |
|||||
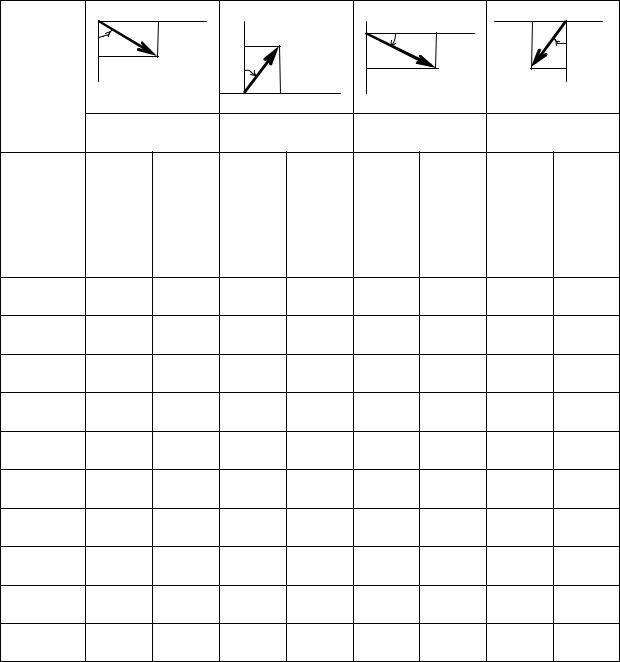
Номер |
Точка приложения |
град |
Точка приложения |
град |
Точка приложения |
град |
Точка приложения |
град |
|
условия |
|||||||||
, |
2 |
3 |
4 |
||||||
1 |
|||||||||
|
α |
α |
α |
α |
|||||
0 |
E |
60 |
H |
30 |
— |
— |
— |
— |
|
1 |
— |
— |
D |
60 |
Е |
30 |
— |
— |
|
2 |
— |
— |
— |
— |
K |
60 |
Е |
30 |
|
3 |
K |
30 |
— |
— |
D |
0 |
— |
— |
|
4 |
— |
— |
E |
30 |
— |
— |
D |
60 |
|
5 |
H |
0 |
K |
60 |
— |
— |
— |
— |
|
6 |
— |
— |
H |
90 |
D |
30 |
— |
— |
|
7 |
— |
— |
— |
— |
H |
60 |
K |
90 |
|
8 |
D |
30 |
— |
— |
K |
0 |
— |
— |
|
9 |
— |
— |
D |
90 |
— |
— |
H |
30 |
|
Пример С4. Горизонтальная прямоугольная плита весом Р |
|
||||||||
(рис. С4) закреплена |
сферическим |
шарниром в |
точке |
А, цилиндрическим |
|||||
(подшипником) в точке В и невесомым стержнем DD'. На плиту в плоскости, |
|||||||||
параллельной хz, действует сила F, а в плоскости, параллельной yz, — пара сил с |
|||||||||
моментом М. |
|
|
|
|
|
|
|
||
Дано: Р = 3 кН, F = 8 кН, М = 4 кН м, = 60°, АС = 0,8 м, АВ = 1,2м, BE = |
|||||||||
0,4 м, ЕН = 0,4 м. |
|
|
|
|
|
|
|
||
23
Определить: реакции опор А, В и стержня DD'.
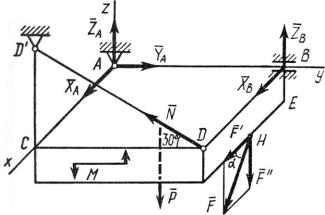
Решение. 1. Рассмотрим равновесие плиты. На плиту действуют заданные силы Р, F и пара
с моментом М, а также реакции
связей. |
Реакцию |
сферического |
|
шарнира |
разложим |
на |
три |
составляющие ХA, YA, ZA, цилиндрического (подшипника) —
Рис. С4
на две составляющие ХB, ZB (в
плоскости, перпендикулярной оси
подшипника); реакцию N стержня направляем вдоль стержня от D к D',
предполагая, что он растянут.
2. Для определения шести неизвестных реакций составляем шесть
уравнений равновесия действующей на плиту пространственной системы сил:
Fkx = 0, XA + XB + F cos60 = 0 |
(1) |
Fky = 0, YA – N cos30 = 0 |
(2) |
Fkz = 0, ZA + ZB – P + N sin30 – F sin60 = 0 |
(3) |
mx(Fk) = 0, M – P AB/2 + ZB AB – F sin60 AB + N sin30 AB = 0 |
(4) |
my(Fk) = 0, P AC/2 – N sin30 AC + F sin60 AC/2 – F cos60 BE = 0 |
(5) |
mz(Fk) = 0, – F cos60 AB – N cos30 AC – XB AB = 0 |
(6) |
Для определения моментов силы F относительно осей разлагаем ее на составляющие F' и F", параллельные осям х и z (F' = F cos ,
F'' = F sin ), и применяем теорему Вариньона (см. «Указания»). Аналогично можно поступить при определении моментов реакции N.
Подставив в составленные уравнения числовые значения всех заданных величин и решив эти уравнения, найдем искомые реакции.
Ответ: ХА = 3,4 кН; YА = 5,1 кН; ZA = 4,8 кН; ХB = –7,4 кН; ZB = 2,1 кН;
24
N = 5,9 кН. Знак минус указывает, что реакция ХB направлена противоположно показанной на рис.С4.
Задача С5
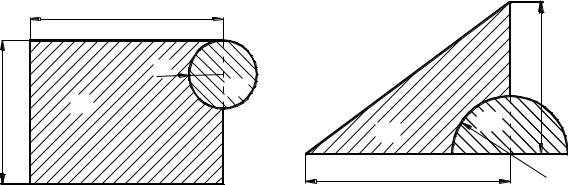
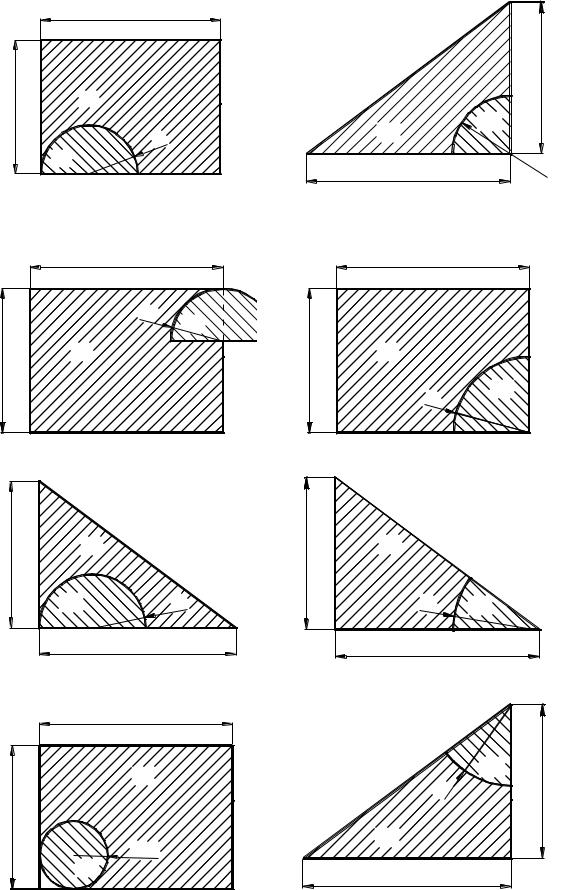
Определить положение центра тяжести С неоднородной плоской фигуры
(рис. С5.0 – С5.9), состоящей из однородного кругового сектора (круга) радиуса
R и массы m2 и части однородного прямоугольника или прямоугольного треугольника со сторонами (катетами) a, b и массой m1. Исходные данные для задачи приведены в таблице С5.
Указания. Координаты центра тяжести неоднородной плоской фигуры,
состоящей из однородных поверхностей, можно приближенно определить по формулам:
|
1 |
n |
|
1 |
n |
|
xC |
xKC PK , |
yC |
yKC PK , |
|||
|
|
|||||
|
P k 1 |
|
P k 1 |
|||
где Pk – вес k –й поверхности; P = P1+P2;
xKC, yKC – координаты центра тяжести k – й поверхности.
Наиболее распространенным приемом использования формул для определения центра тяжести является мысленная разбивка на такие части,
положение центра тяжести каждой из которых известно либо может быть легко определено. В некоторых случаях целесообразно твердое тело заменять не суммой, а разностью его отдельных частей.
|
b |
|
R |
|
m2 |
a |
m1 |
|
|
|
Рис. С5.0 |
a
m1 |
m2 |
|
|
b |
R |
|
|
Рис. С5.1 |
|
25
|
b |
|
|
|
|
|
|
|
|
|
a |
a |
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
m2 |
|
R |
|
|
|
|
|
|
|
|
|
|
|
m2 |
|
|
b |
R |
|
|
|
|
||
|
|
|
|
|
|
|
Рис. С5.2 |
|
|
Рис. С5.3 |
|
|
b |
|
|
b |
|
|
R |
m2 |
|
|
|
|
|
|
|
|
|
a |
m1 |
|
a |
m1 |
|
|
|
|
|
||
|
|
|
|
R |
m2 |
|
|
|
|
|
|
|
Рис. С5.4 |
|
|
Рис. С5.5 |
|
a |
m1 |
|
a |
m1 |
|
|
|
|
|
||
|
m2 |
R |
|
R |
m2 |
|
b |
|
|
b |
|
|
Рис. С5.6 |
|
|
Рис. С5.7 |
|
|
b |
|
|
|
|
|
m1 |
|
|
|
m2 |
|
|
|
R |
a |
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
R/2 |
|
|
m1 |
|
|
|
|
|
|
|
|
m2 |
|
|
b |
|
|
|
|
|
|
|
|
Рис. С5.8 |
|
|
Рис. С5.9 |
|
|
|
|
26 |
|
|
|
|
|
|
|
Таблица С5 |
|
|
|
|
|
|
|
|
Номер |
R, м |
а, м |
b, м |
m1, кг |
m2, кг |
|
варианта |
||||||
|
|
|
|
|
||
0 |
0,5 |
2 |
3 |
10 |
2 |
|
1 |
1 |
3 |
5 |
15 |
4 |
|
2 |
0,5 |
2 |
4 |
20 |
6 |
|
3 |
1 |
4 |
5 |
10 |
3 |
|
4 |
1,5 |
3 |
5 |
12 |
5 |
|
5 |
0,5 |
2 |
5 |
14 |
2 |
|
6 |
2 |
5 |
5 |
16 |
5 |
|
7 |
1 |
3 |
4 |
18 |
3 |
|
8 |
0,5 |
4 |
4 |
15 |
1 |
|
9 |
1 |
2,5 |
5 |
13 |
3 |
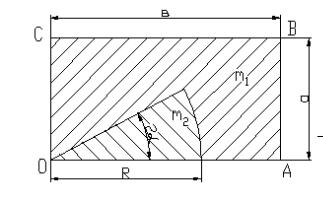
Пример С5.
Дано: а = 0,5 м, b = 1 м, R = 0,7 м, 2 = 60°, m1 = 20 кг, m2 = 15 кг.
Определить положение центра тяжести, неоднородной плоской фигуры
(рис. С5.10).
Рис. С5.10
Решение. Направим ось x вдоль горизонтальной стороны сектора, а ось y –
вдоль вертикали 0C (рис. С5.11).
27

a) |
b) |
Рис. С5.11
Определим положение центра тяжести однородной пластины 2 (кругового сектора 0DK) рис. С5.11а. Центр тяжести кругового сектора лежит на оси
симметрии, на расстоянии OC2 |
|
2R sin |
от начала координат, тогда |
|
3 |
||||
|
|
|
координаты xC2, yC2 центра тяжести этой пластины найдем в виде проекций точки С2 на оси x, y:
xC2 |
OC2 cos |
2 |
R |
sin cos |
|
|
R sin 2 |
|
|
|
0.7 6 sin 60 |
0.386м ; |
|||||||||
3 |
|
|
|
|
3 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|||||||
|
yC2 OC2 sin |
2 |
R |
sin 2 |
|
|
|
2 |
0.7 |
|
0.25 6 |
0.223м . |
|||||||||
|
3 |
|
|
|
|
3 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Определим положение центра тяжести тела 1 (рис. С5.11b), используя
метод отрицательных масс. Представим площадь первой пластины S1 в виде разности площадей прямоугольника OABC – S' кругового сектора ODK S2: S1= S' – S2; S'= a∙b; S2= R2/6.
Положение центра тяжести первой пластины определим по формуле
центра тяжести для однородного тела:
x |
C1 |
x1S x C2S2 |
x1S x C2S2 ; |
||||||
|
|
|
S S2 |
|
S1 |
|
|||
|
|
|
|
|
|
||||
y |
C1 |
y1S yC2S2 |
y1S yC2S2 , |
||||||
|
|
|
|
S S2 |
|
S1 |
|
||
|
|
|
|
|
|
||||
28
где x1, y1 – координаты центра тяжести прямоугольника OABC:
x |
|
|
b |
y |
a |
, |
1 |
|
|
||||
|
2 |
1 |
2 |
|
||
|
|
|
|
|||
тогда
|
|
|
|
|
|
|
|
b |
ab |
R sin 2 |
|
R 2 |
|
|
||||||||||
x |
C1 |
|
2 |
|
3 |
|
6 |
|
0.619м , |
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R 2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
ab |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
a |
ab |
|
2 |
R |
sin 2 |
|
|
R 2 |
|
|
||||||||
y |
C1 |
|
2 |
3 |
|
|
|
|
6 |
|
|
0.278м . |
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
R 2 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
ab |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Определим положение центра тяжести искомой фигуры по формулам:
x |
C |
x C1m1g x C2 m2g |
x C1m1 x C2 m2 ; |
|||||||
|
|
m1g m2g |
|
m1 m2 |
|
|||||
|
|
|
|
|||||||
|
|
|
y |
C |
yC1m1 yC2 m2 . |
|||||
|
|
|
|
|
m1 m2 |
|
||||
|
|
|
|
|
|
|||||
После подстановки в полученные уравнения исходных данных получаем значения координат центра тяжести неоднородной пластины.
Ответ: xC 0.519м , yC 0.254м .
29
ЛИТЕРАТУРА
1.Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. Т.1. - М.: 2009.
2.Яблонский А.А., Норейко С.С. и др. Сборник заданий для курсовых работ по теоретической механике. - М.: 2006.
3.Теоретическая механика. Методические указания и контрольные задания, под ред. С.М.Тарга. - М.: 1989.
Содержание
Введение....................................................................................... |
3 |
Задача С1...................................................................................... |
5 |
Задача С2...................................................................................... |
10 |
Задача С3...................................................................................... |
16 |
Задача С4...................................................................................... |
20 |
Задача С5...................................................................................... |
25 |
Литература ................................................................................... |
30 |
30