

5. Построение схемы деформирования зрс
Косвенную проверку полученных результатов можно провести, построив деформированное состояние ЗРС по полученным значениям и знакам перемещений в т. K и, сравнив затем полученную картину с деформирующим воздействием приложенных к ЗРС нагрузок.
При построении деформированного состояния нужно учитывать наложенные на ЗРС опорные связи, а также непрерывность и малую величину перемещений точек осей. Схема деформирования, построенная по результатам решения задачи о вычислении перемещений сечения K, представлена на рис. 2.31.
Анализ поведения ЗРС под действующей нагрузкой проводится на основании следующих соображений:
наличие шарнирно-подвижной опоры в узле 4 при действии сосредоточенной силы 2qaприводит к отклонению этого узла вверх;
движению вверх участка 2–4 препятствует распределенная нагрузка q, однако, ее воздействие возле узла 4, как показывают полученные результаты, недостаточно;
под действием изгибающего момента qa2свободный от закрепления узел 3 переместится вправо;
с учетом малости перемещений и их непрерывного характера на рис. 2.31 отражено свойство жестких узлов 2 и 4 в процессе деформированиясохранять перпендикулярность соединяющихся в них участков.
Таким образом, полученные результаты обладают определенной степенью достоверности, как показывает проведенный выше приблизительный анализ деформированного состояния ЗРС.
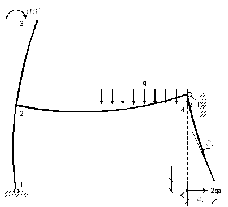
Рис. 2.31
Метод Загруж-й
0 1
Неизв. Сечений Перем-й
0 7 3
Элементы матрицы MPZR - только для метода перемещений !
Элементы матрицы MXZ
Элементы матрицы MPR
-0.5 -1 0.5 1.5 1.875 2 0
Элементы матрицы B3
0 4 0 0 12 0 0 2 1 1
3 0 0 4 0 0 5 2 2 4
0
Общий знаменатель матрицы В3
12
Элементы матрицы MD
1 0 1 1 1 1 0 2 0 2
1 0.5 0 0 1 0 1 1 1 1
1