

Где величина , т.Е. Ускорение, которое точка м получает при движении вместе с телом вокруг полюса а, определяется равенством
![]() ,
,
в
котором
![]() ,
а
вектор
,
а
вектор
![]() будет равен
будет равен
![]() .
.
Таким образом, ускорение любой точки свободного твердого тела можно определить построением многоугольника ускорений.
4.5. Задания для самостоятельной работы
4.5.1. Мгновенная ось вращения
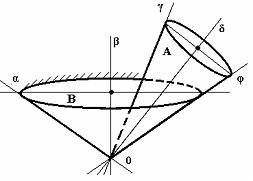
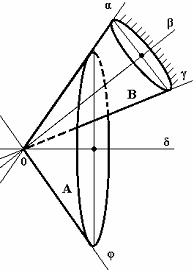
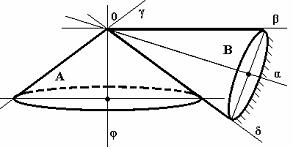
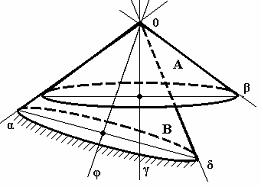
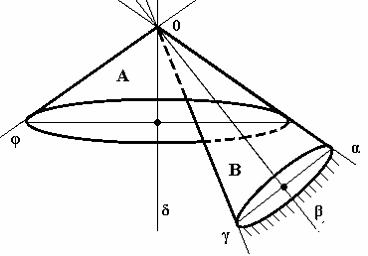
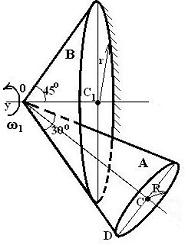
Условие: Подвижный конус А катится без скольжения по неподвижному конусу B, имея неподвижную точку O (табл. 19). Мгновенная ось вращения совпадает с направлением… (выберите один правильный ответ).
Таблица 19
Варианты тестовых заданий по теме «Мгновенная ось вращения»
|
№ |
Схема |
Варианты ответов |
|
1 |
|
1. Oφ 2. Оγ 3. Оβ 4. Оδ 5. Оα |
|
2 |
|
1. Оβ 2. Оα 3. Oφ 4. Оδ 5. Оγ
|
|
3 |
|
1. Оα 2. Оγ 3. Оβ 4. Oφ 5. Оδ
|
|
4 |
|
1. Оδ 2. Oφ 3. Оγ 4. Оα 5. Оβ |
Продолжение табл. 19
|
№ |
Схема |
Варианты ответов |
|
5 |
|
1. Oφ 2. Оβ 3. Оα 4. Оγ 5. Оδ
|
4.5.2. Мгновенная угловая скорость тела при сферическом движении
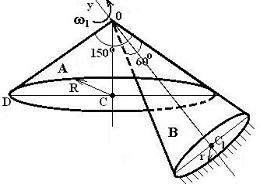
Пример.
Подвижный конус A
катится без проскальзывания по
неподвижному конусу В
так, что угловая скорость вращения оси
OC
вокруг OC1
неподвижного конуса постоянна и равна
![]() .
Найдите мгновенную угловую скорость
конусаA,
если известны углы α = 60º и β = 90º (рис.
60).
.
Найдите мгновенную угловую скорость
конусаA,
если известны углы α = 60º и β = 90º (рис.
60).
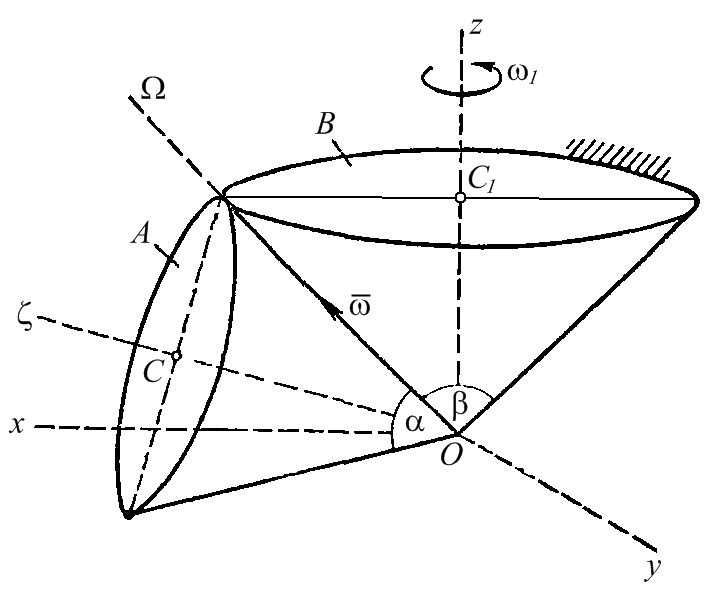
Рис. 60. Иллюстрация к примеру
Решение. Мгновенную угловую скорость ω конуса А, вектор которой направлен вдоль мгновенной оси вращения ОΩ, можно найти путем сложения вращений вокруг пересекающихся осей – построением параллелограмма угловых скоростей (рис. 61).
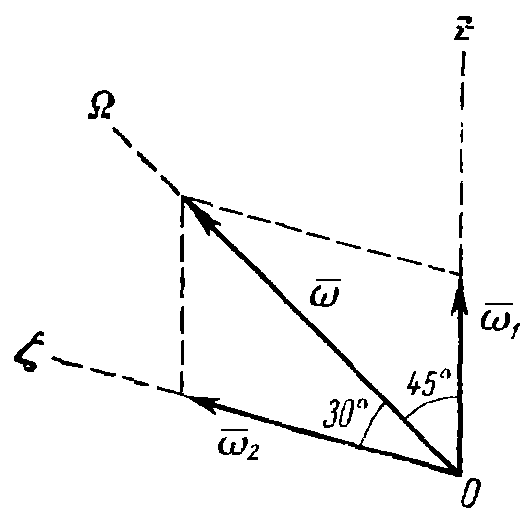
Рис. 61. Построение параллелограмма угловых скоростей
На
схеме
![]() – угловая скорость конусаА
во вращении относительно собственной
оси Оς,
– угловая скорость конусаА
во вращении относительно собственной
оси Оς,
![]() – искомая мгновенная угловая скорость
конусаА
во вращении относительно мгновенной
оси ОΩ.
– искомая мгновенная угловая скорость
конусаА
во вращении относительно мгновенной
оси ОΩ.
По теореме синусов
![]() ,
,
откуда
![]() с-1.
с-1.
Ответ:
![]() с-1.
с-1.
Самостоятельно решите следующие тестовые задания (табл. 20).
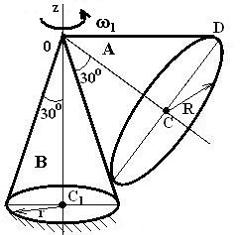
Условие.
Подвижный
конус A
катится без проскальзывания по
неподвижному конусу В
(см. схему в табл. 20) так, что угловая
скорость вращения оси OC
вокруг оси OC1
неподвижного конуса постоянна и равна
![]() (рад/с). Если известны углы и радиус
основанияR
= 1 м, мгновенная угловая скорость конуса
A
равна…
(выберите один правильный ответ из
списка предложенных).
(рад/с). Если известны углы и радиус
основанияR
= 1 м, мгновенная угловая скорость конуса
A
равна…
(выберите один правильный ответ из
списка предложенных).
Примечание:
![]() ;
;![]() .
.
Таблица 20
Варианты тестовых заданий по теме «Мгновенная угловая скорость тела при сферическом движении»
|
№ |
Схема |
Варианты ответов |
|
1 |
|
1.
2.
3.
4.
5.
|
|
2 |
|
1.
2.
3.
4.
5.
|
|
3 |
|
1.
2.
3.
4.
5.
|
|
4 |
|
1.
2.
3.
4.
5.
|
|
5 |
|
1.
2.
3.
4.
5.
|


Глава 5. Кинематика сложного движения точки
5.1. Понятие о сложном движении точки
|
Обычно движение точки рассматривается по отношению к условно неподвижной системе отсчета (телу отсчета) или неподвижной системе координат х1у1z1. В некоторых случаях при решении задач необходимо рассматривать движение точки в подвижной системе координатОхуz, которая в свою очередь движется относительно неподвижной системы координатО1х1у1z1(рис. 62). В этом случае движение точки рассматривают как сложное(илисоставное), которое состоит из двух или более простых движений. |
|
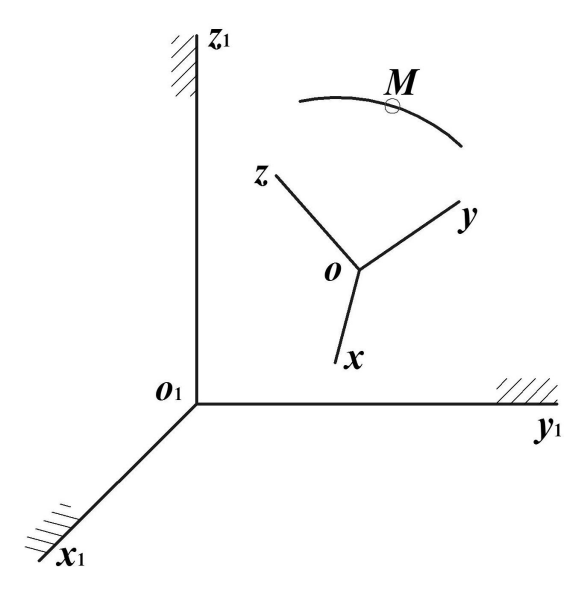
Движение точки называется сложным, если ее движение рассматривать одновременно относительно двух (и более) систем отсчета, причем одна из них условно считается неподвижной, а вторая определенным образом движется по отношению к первой.
Сложное движение, например, совершают: лодка, пересекающая реку; пассажир, идущий в вагоне движущегося поезда; человек, поднимающийся по лестнице движущегося эскалатора.
Движение
точки М
по отношению к неподвижной системе
отсчета О1х1y1z1
(рис. 62) называется абсолютным
движением.
Скорость и ускорение точки по отношению
к неподвижной системе отсчета называется
абсолютной
скоростью
![]() и абсолютным
ускорением точки
и абсолютным
ускорением точки
![]() .
Движение точкиМ
по отношению к подвижной системе отсчета
Охyz
называется относительным
движением.
Скорость и ускорение точки в относительном
движении называется относительной
скоростью
.
Движение точкиМ
по отношению к подвижной системе отсчета
Охyz
называется относительным
движением.
Скорость и ускорение точки в относительном
движении называется относительной
скоростью
![]() и относительным ускорением
и относительным ускорением![]() точки(relative
– относительный).
точки(relative
– относительный).
Движение, совершаемое подвижной системой отсчета и всеми неизменно связанными с этой системой точками пространства по отношению к неподвижной системе отсчета, является для точки М переносным движением.
Скорость
и ускорение той точки, неизменно связанной
с подвижной системой отсчета, с которой
в данный момент совпадает точка М,
называется переносной
скоростью
![]() и переносным ускорением
и переносным ускорением
![]() точки (emporter
– увлекать).
точки (emporter
– увлекать).
Основная задача кинематики сложного движения состоит в установлении зависимости между скоростями и ускорениями относительного, переносного и абсолютного движения точки.
На основании рассмотренного ранее (см. раздел 4.4) можно утверждать, что само переносное движение можно рассматривать как совокупность поступательного движения подвижной системы отсчета Oxyz вместе с точкой О (полюсом) и из серии элементарных поворотов вокруг мгновенной оси вращения, проходящей через этот полюс.