

Конспект лекции ЭГ 2008
.pdf- 41 -
Дополнительные программные модули
Уравнивание данных спутниковых дифференциальных подсистем (измеренные псевдодальности и поправки в формате RTCM) с визуализацией графического распределения навигационных спутников
Использование первичных и обработанных данных МЛЭ для съемки подводных трубопроводов
Сравнение полос съемки МЛЭ
Поддержка морского вертикального сейсмического профилирования (управление пневмоисточником, визуализация качества работы пневмоисточника, интерполяция и слияние в форматах Р1\90)
Управление пневмоисточником и визуализация качества работы пневмоисточника
Менеджера трехмерной виртуальной реальности реального времени (VEM)
Редактирование данных
Поддержка удаленного монитора
Поддержка файлов проектов *.PRO пакета TERRAMODEL
Визуализация растровых изображений ГБО и экспорт файлов формата XTF
Модуль автоматического построения планшетов (ASAP)
Модуль управления растровыми изображениями
3.3.1. Базовые компоненты пакета
3.3.1.1. Менеджер проектов
Менеджер проектов обеспечивает текущий обзор состояние проекта позволяя быстро определять, что было и что еще необходимо сделать на уровне проекта. Данные, относящиеся к одному проектному галсу съемки, обычно хранятся в одной реляционной базе данных. Менеджер проекта ведет таблице баз данных текущего проекта съемки и определяет допустимый перечень операций, которые могут быть выполнены над каждой их этих баз данных. Когда определенная операция над конкретной базой данных совершена, заполняется соответствующая ячейка таблицы Действия отражают фазы обычной съемки, начиная с конфигурации съемки (заполнение заголовкаобщих сведений о съемке), регистрация данных на проектном галсе, просмотр данных съемки (если необходимо), а также статистический анализ по окончанию галса.
3.3.1.2. Регистрация данных
QINSy очень быстрая система, потому что использует реляционную базу данных собственной разработки. Управление файлами простое, потому что для каждого проектного галса съемки требуется хранить только два файла (для батиметрии используется еще один файл *.qpd):
База данных установок и первичных данных;
-База окончательных данных . Первая БД включает:
-общее описание съемки, геодезические параметры и настройки драйверов ввода\вывода;
-конфигурацию съемки, т.е. описание объекта (судна), узла и обсервации;
-определение датчиков и установок для уравнивания данных в реальном времени;
-все первичные данные датчиков, привязанные к единой временной шкале, обычно UTC. Это означает, что вся съемка может быть впоследствии заново пересчитана, если будет обнаружена ошибка в установках. Это позволяет избежать необходимость проведения повторной
- 42 -
съемки. Формат базы данных закрытый, однако все данные из БД могут экспортированы в текстовый формат UKOOA P2/94.
База окончательных данных съемки содержит координаты узловых точек всей сети вместе с их элементами эллипса ошибок. Кроме того, в этой базе данных для каждой точки хранятся статистические характеристики:
Аналогично первой, формат этой БД также является закрытым, однако поддерживается вывод результатов в текстовые форматы UKOOA P1/90, P5/94, а также ASCII –формат, заданный пользователем.
Наиболее существенными свойствами базы окончательных данных являются:
-хранение для каждого узла съемки: широты, долготы, геодезической высоты, X(UTM), Y(UTM), параметров пространственного эллипса ошибок с 95% доверительной вероятностью и временной привязки
-статистических характеристик координат каждого узла;
-данных для сравнения различных источников местоопределения;
-полная поддержка текстовых форматов UKOOA P1/90, P5/94, а также ASCII –формата, заданного пользователем.
-мастер создания шаблонов и статистических отчетов завершения галса.
3.3.1.3. Геодезическая поддержка
Поскольку обеспечивается поддержка практически всех существующих координатных систем (datum) QINSy , сможет работать в любом районе земного шара. Характеристики геодезической поддержки следующие:
-одновременно 9 систем координат из 50 заранее определенных, а также возможность создания собственной координатной системы;
-преобразования координат из одной системы координат в другую по семи параметрам;
-пять поддерживаемых проекций:
-UTM/TM;
-коническая проекция Ламберта (1 или 2 стандартные параллели );
-проекция Кассини;
-Стереографическая проекция;
-улучшенная ортометрическая проекция (rectified Skewed Ortomorphic)/
-двенадцать заранее определенных единиц измерений, а также возможность создания сво ей собственной единицы измерений.
3.3.1.4. Контроллер (Controller)
Контроллер выполняет различные функции QINSy, от управления временем и потоком данных от одного модуля к другому, до запуска пользовательских опций:
Программное управление:
-создание и сохранение окон индикации данных, установленных пользователем;
-восстановление окон индикации, созданных пользователем;
-запуск программ калибровки датчиков;
-управление выводом данных на печать;
-задание точек для плавания;
-43 -
-установка фильтров для обсерваций и эхолотной информации;
-задание датчика угловой ориентации для объекта (судна);
-задание вариантов регистрации данных в реальном времени и фильтрации координат. Установки для уравнивания данных съемки:
-мастер установок для задания сети уравнивания данных;
Установки для автоматического начала галса:
Мастер установок для определения старта текущего галса; Регистрация данных:
Управление расчетом координат, автоматическим вводом данных и регистрацией, Управление просмотром зарегистрированных данных.
3.3.1.5. Весовое уравнивание сети по методу наименьших квадратов.
Очень быстрый и мощный механизм уравнительных вычислений в динамической сети способен использовать информацию практически любых существующих датчиков, от GPS (псевдодальностей) до гидроакустических навигационных систем с длинной и короткой базой до фазовой спутниковой аппаратуры, реализующих режим кинематики реального времени, а также гирокомпасы и.т.д. В QINSy существует большая свобода в возможности объединения позиций от всех этих датчиков в единое решение, основанное на обобщенном методе наименьших квадратов (весовое уравнивание динамической сети).. Важно понимать те преимущества, которые предоставляет такое уравнивание сети по сравнению с традиционным последовательным по шаговым решением расчета координат, а именно:
-подчеркивается взаимосвязь между узлами сети в которых необходимо рассчитать координаты, учитывая, что отдельные точки не могут быть независимы внутри сети;
-отражает интегрированный подход к расчету координат, давая устойчивое решение без внутренних противоречий;
-поддерживается всесторонняя оценка точности;
-обеспечивается реалистичное описание точности и надежности – этих двух компонентов качества измерений.
3.3.1.6. Поддержка точного времени PPS
Использование импульса 1 PPS (Pulse Per Second) и точной метки времени UTC , выдаваемых спутниковой навигационной аппаратурой в качестве единой временной шкалы к которой осуществляется временная привязка всех поступающих и передаваемых данных с точностью 1 mc (миллисекунда).
Обеспечивается чрезвычайно точное приведение обсерваций к одному общему моменту. Абсолютно необходимо для работы с ЭМЛ и ГАНС с ультракороткой базой (USBL). 3.3.1.7. Поддержка навигационных датчиков
QINS может быть сопряжена с практически всеми существующими типами навигационных и иных датчиков. Типы датчиков приводится ниже. Полный перечень драйверов устройств , способных работать в составе QINS приводится на сайте фирмы. Этот перечень постоянно расширяется. Все имеющиеся драйверы поставляются в составе пакета QINSy Survey.
Вновь создаваемые драйверы для новых датчиков доступны бесплатно. QINS может быть сопряжена с следующими датчиками:
-однолучевые эхолоты;
-многолучевые эхолоты;
-44 -
-гидроакустической навигационной системой (ГАНС) с ультракороткой базой;
-Датчик качки (углов крена, дифферента и вертикальных перемещений),
-Судовые гирокомпасы и гирокомпасы на подводном техническом средстве (ROV);
-Датчики глубины и давления;
-Измерители уровня моря;
-Наземные радионавигационные системы Микрофикс (Microfix) Силедис (Syledis) и.т.д.
-Датчики координат (данные о позиции в формате NMEA);
-Спутниковые радионавигационные навигационные системы (GPS);
-Системы дифференциальной коррекции в формате RTCM$
-Сообщения контроля качества (QC) или текстовые строки данных QC других производителей ;
-Датчики PPS/UTC для синхронизации с единой временной шкалой.
3.3.1.8. Фильтрация и приведение координат (Position Skewing and Filtering)
Фильтр Калмана использует модель измерений и динамическую модель, т.е. гирокомпас и лаг для моделирования движения объекта (судна). Применяются две динамические модели:
-постоянная скорость,
-равномерное круговое движение (uniform circular motion), для судов с высокой
динамикой.
Для динамики каждой из этих моделей имеется по пять установок:
-очень низкая (very low),
-низкая (low),
-средняя (medium),
-высокая (high),
-очень высокая (very high).
Разновременность обсерваций от различных датчиков всегда представляло собой проблему при динамических съемках. Система QINSy решает эту проблему путем очень точной привязки всех поступающих и передаваемых данных к единой шкале времени (с точностью 1 мс). Такой шкалой является шкала времени UTC, если используется импульс PPS, выдаваемый спутниковой аппаратурой.
Обсервации приводятся к времени получения псевдодальностей; Расчет позиции в соответствии с фильтром Калмана приводятся к моменту события;
Обсервации, полученные из других источников, приводятся к времени QINSy или событий. Во многих случая полностью исправленные данные выдаются в реальном масштабе времени Например, при подключение датчика качки (крен,дифферент, вертикальное перемещение)
полностью исправленные данные МЛЭ могут выдаваться в реальном масштабе времени. 3.3.1.9. Генерация обсерваций (событий) и опции регистрации информации
Обсервации могут генерироваться , основываясь на следующих критериях:
-интервал времени или пройденное расстояние, заданное пользователем;
-расстояние, пройденное вдоль линии проектного галса;
-внешний сигнал;
-команда оператора, поданная с клавиатуры;
-периодический внешний сигнал с заданным пользователем временем в мс.(как правило, для морской сейсморазведки и VSP);
- 45 -
Данные могут регистрироваться, основываясь на следующих критериях
-каждое внутреннее событие основанное на частоте опроса датчика;
-каждое n-ое событие съемки
3.3.1.10. Сетевая поддержка обмена первичными и окончательными данными.
Внутри локальной сети LAN и WAN обмен первичными и окончательными данными осуществляется с использованием TCP/IP протокола. Сам Интернет может быть использован на проектах с буровой платформой для обеспечения удаленного контроля качества Те же сетевые драйверы могут быть использованы в проекте с несколькими объектами (судами) когда первичные данные пересылаются в центральную систему, обрабатываются и возвращаются назад для использования (визуализации).
1.1.11. Импорт \экспорт в форматы для сторонних пользователей
Автоматическая конвертация данных в текстовом формате UKOOA P2/94 в формат базы данных QINSy и наоборот;
Обеспечение контроля качества данных DGPS которые хранятся как первичные данные в формате UKOOA P2/94. Координаты, рассчитанные в QINSy могут быть сравнены с независимо рассчитанными координатами, полученными от сторонних пользователей.
Формат окончательных данных, хранящийся в результирующей БД является форматом UKOOA P1/90 который содержит координаты точек: антенны, точки приведения на судне, пневмопушки, группы приемников и концевого буя.
Формат координат хранящихся в БД результатов соответствует текстовому формату UKOOA
P5/94 |
|
|
|
|
1.1.12. Статистический анализ |
|
|
|
|
Имеется мощная программа статистических расчетов для |
анализа |
всех |
данных на основе |
|
графического представления |
положения точек позиции |
(scatter |
plots) |
временных рядов |
наблюдений (time series) Программа предоставляет следующие возможности:
-услуги «мастера статистики » по выбору данных;
-выбор параметров уравнивания, свойств обсервации и узловых точек, анализа координат;
-установка порогов для автоматической пометки тех измерений, у которые порог превышен. Когда пороги установлены в начале съемки, необходимая статистические параметры могут быть быстро получены по завершении галса.
-Просмотр результатов на экране или выдача их на печать
-Задание пользователем масштаба, цветов, графических представлений положений.
3.3.2. Доступные индикации пакета программы QINSy
Большое количество индикаций доступны пользователю. Большинство может быть модифицированы пользователем в зависимости от того, какие данные и их свойства желательно индицировать.
Ввиду тог, что каждое окно представляет собой отдельно исполняемую программу, возможно открыть столько окон, сколько необходимо, включая два и более одинаковых окна с разным набором данных. Например, несколько судов, объединенных локальной сетью работают на одной съемке, но на расстоянии друг от друга, могут быть представлены на нескольких навигационных окнах (navigation display), одно отображает общую картину, а каждое другое – каждое из судов.
-46 -
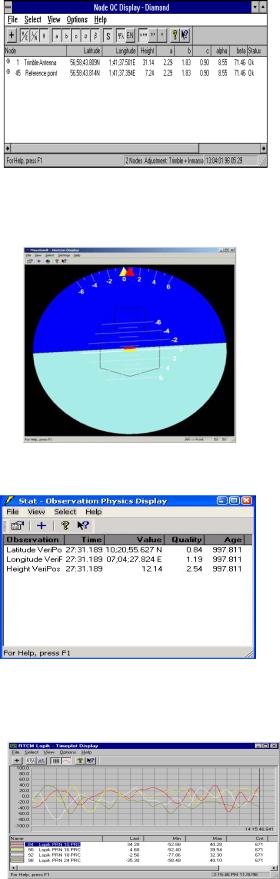
3.3.2.1.Окно контроля качества узловой точки («Node QC Display») – см. рис.3.5 Содержит следующие данные:
▪широта, долгота, высота, восточное и северное положение;
▪элементы эллипса ошибок для 95% доверитель ной вероятности;
▪путевой угол и путевая скорость, истинный курс;
▪строки данных, заданные пользователем;
▪координаты, заданные пользователем
(географические или на проекции). Рис.3.5. Окно контроля качества узловой точки
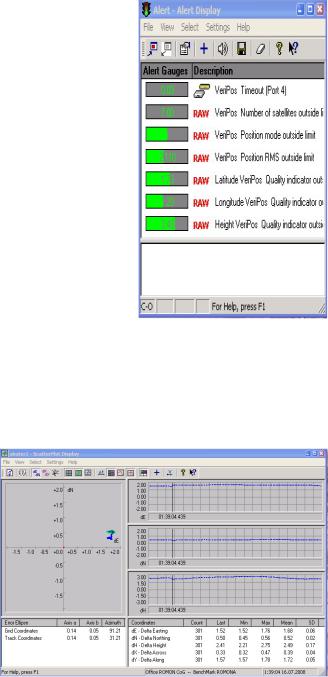
3.3.2.2. Окно контроля качества работы датчиков пространственной ориентации («Horizon Display») . Содержит следующие данные:
▪измеренное значение угла крена «обьекта»;
▪измеренное значение угла дифферента «обьекта» ;
▪измеренное значение курса «обьекта»;
▪измеренное значение вертикального перемещения;
▪графическое отображение поперечного и продольного вида «обьекта»; Параметры, определенные пользователем.
Окно контроля качества работы датчиков пространственной ориентации показано на рис.3.6.
Рис.3.6. Окно контроля качества работы ДПО
3.3.2.3. Окно первичных параметров обсервации «Observation PhysicsDisplay» - см. рис.3.7. Содержат следующие данные:
▪момент измерения (время и дата),
▪измеренные параметры,
▪индикатор качества (статистика из NMEA предложения $GPGST),
▪-скорость изменения поправки (только для GPS)
▪IOD (только для GPS),
▪UDRE (только для GPS),
▪ параметры, заданные пользователем.
3.3.2.4. Окно «Временные развертки данных» («Time Series Display») - см. рис.3.8. Содержит следующие данные:
▪ первичные навигационные данные, |
|
▪ статистические результаты уравнивания |
|
▪ Координатные оси задает пользователь |
|
▪ Минимальное, максимальное, среднее и |
|
стандартное отклонение, |
|
▪ Множественные свойства обсервации на одной |
|
панели |
Рис.3.8. Окно «Временные развертки данных» |
▪ Цветовая палитра, установленная пользователем |
- 47 -
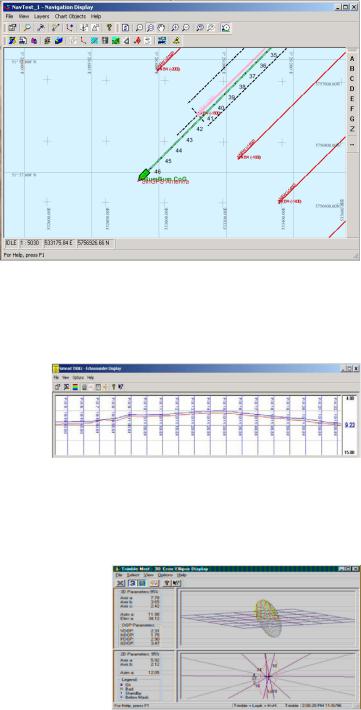
3.3.2.5. Окно тревожных сообщений («Alert Display») см. рис.3.9. Содержит следующие данные:
Предупреждение ввода \ вывода навигационных данных:
▪Допустимое время отсутствия данных для каждого датчика .
▪Предупреждения по первичным данным:
Возраст данных превосходит заданный предел, Нет эфемерид, Обсервация выше установленного пользователем предела, Обсервация ниже установленного пользователем предела , Смещение обсервации более установленного предела
▪Предупреждение по уравнительным вычислениям : Уклонение от галса сверх допустимого предела, Смещение позиции более установленного предела, F-тест, MDE или внутренняя надежность сверх установленного предела число итераций при уравнивании сверх установленного предела
▪Окно сообщений звуковой сигнализации и событий съемки
▪Сохранение на диске сообщений о событиях в файл вахтенного журнала
▪Мастер тревожных сообщений
Рис.3.9. Окно тревожных сообщений
3.3.2.6. Окно графического представления рассеивания обсерваций («Scatter Plot Display»)
см. рис.3.10.
Содержит следующие данные:
▪Задание пользователем опорной точки для сравнения с выбранной узловой точкой
▪Дополнительная алфавитно-цифровая индикация статистик для: Среднего, стандартных отклонений по широте, долготе, высоте и количества отвергнутых обсерваций ).
▪Определяемые пользователям масштабы по осям Х и У
▪ Эллипс ошибок позиции с 95% доверительной вероятностью
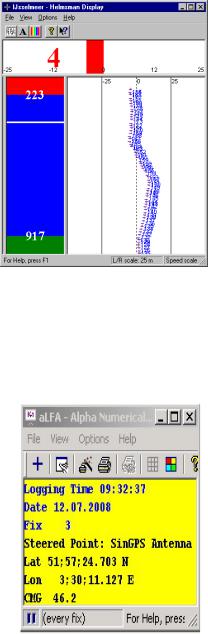
3.3.2.7. Навигационное окно («Navigation Display») – см. рис.3.11.
•Задаваемое пользователем количество слоев для отображения : Движущихся объектов (судов, ПТС и.т.д. );
Проектных галсов, трубопроводов, точек-целей в формате БД Microsoft Access; рисунки в формате DXF (AutoCAD), преобразованные в формат QXF для повышения
скорости;
цифровые карты формата СМ93\3 в соответствии со стандартом S57; функции контроля качества работы многолучевого эхолота (МЛЭ);
-48 -
•Измерения дистанций и направлений на электронной карте;
•Планирование путевых точек ;
•Слой оценки работы ЭМЛ в реальном времени на основе матрицы глубин показывает: Среднюю глубину в ячейке матрицы; Стандартное отклонение глубин в ячейке матрицы; Количество лучей, попавших в ячейку матрицы; Минимальная глубина в ячейке матрицы; Максимальная глубина в ячейке матрицы;
•Цветовая палитра для: Дневное освещение мостика Пасмурное освещение мостика сумеречное освещение мостика ночное освещение мостика .
•Зуммирование электронной карты или выбор числового масштаба
•Отображение на электронной
карте |
основного |
объекта в |
|
абсолютном или |
относительном |
|
|
движении (основной объект в |
|
||
центре) |
|
|
|
• Визуализация |
координатной |
Рис.3.11. Вид навигационного окна |
|
сетки |
на карте в виде широт и |
|
|
долгот или километровых линий.
3.3.2.8. Окно однолучевого эхолота («Single Beam Echo Sounder Display») – см. рис.3.12.
Содержит следующие данные:
▪Отображение профиля глубин по оси времени или расстояния
▪Задаваемые пользователем масштабы по
осям Х,У ▪ Задаваемая пользователем цветовая палитра
3.3.2.9. Окно визуализации текущего эллипса ошибок (2 D и 3 D) обсервации («Error Ellipse Display»)
Содержит следующие данные: ▪Эллипс шибок 2 D и 3 D на уровне 95%
доверительной вероятности для выбранного угла
▪Статистика для элементов среднеквадратического эллипса погрешностей: большой (a), малой (b) полуосей и угла ориентировки (Θ), расчет на основе априорных погрешностей.
Окно визуализации текущего эллипса ошибок показано на рис.3.13.
Рис.3.13. Окно визуализации эллипса ошибок
- 49 -
3.3.2.10. Окно для рулевого («Helmsman Display») – см. рис.3.14. Содержит следующие данные:
▪Индикатор бокового уклонения для выбранного узла .
▪Индикатор скорости приближения к проектному галсу для выбранного узла
▪Маршрутный коридор текущего проектного галса с идентификацией точек обсерваций и траекторией объекта
▪Графическое представление дистанций от начала и до конца проектного галса
▪Цветовая палитра для :
Дневное освещение мостика , Пасмурное освещение мостика , сумеречное освещение мостика ,
ночное освещение мостика . Рис.3.14. Окно для рулевого. ▪ Задаваемые пользователем масштабы для индикатора
бокового уклонения, скорости приближения к галсу и отображению траектории
3.3.2.11. Окно алфавитно-цифровой информации съемки («Alpha Numerical Display») см.р ис.3.15
▪Полностью настраиваемый пользователем набор параметров, тип и размер шрифтов, а также цветовая палитра
▪Может быть выбрана следующая информация:
Первичные данные обсервации, Данные позиции, относящиеся в выбранному узлу,
Данные относящиеся к проектному галсу, такие как: путевой угол и скорость, имя галса, номер обсервации и.т.д.
три строки комментариев или обозначений, заданных
пользователем ▪ Мастер создания окна алфавитно-цифровой информации Рис.3.15. Окно АЦИ
Предусмотрена возможность вывода информации отображаемой в окне на принтер или записи в текстовый файл
- 50 -
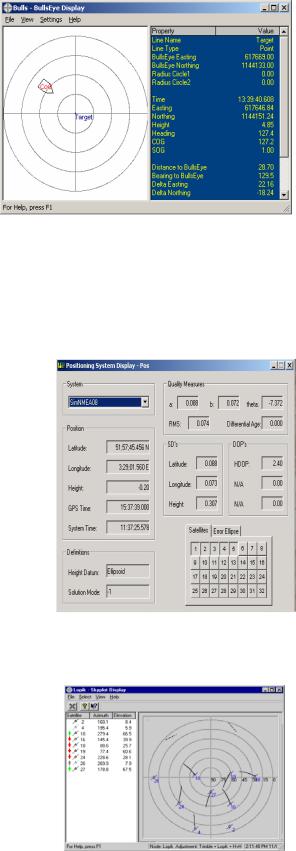
3.3.2.12. Окно точки-цели «бычий глаз» («Bulls Eye or Target Display») - см. рис.3.16. Облегчает точный выхода на точку-цель.
Вокне содержится следующая информация:
▪имя цели;
▪вид цели;
▪картографические координаты точкицели;
▪радиусы вокруг точки-цели;
▪текущее время;
▪картографические координаты судна (Y,X);
▪курс судна;
▪путевой угол судна;
▪ путевая скорость судна; |
Рис.3.16. Окно точки-цели |
▪дистанция до цели;
▪пеленг на цель;
▪разность картографических координат судна и цели (dY,dX).
3.3.2.13. Окно системы позиционирования («Positioning System Display» )- см. рис.3.17. QINSy способна принимать большинство предложений
протокола NMEA с данными систем позиционирования. Кроме координат могут быть отображены и другие данные, содержащиеся в этих предложениях.
Окно системы позиционирование индицирует следующую информацию:
▪ Широту, долготу и высоту ▪ Параметры качества обсервации :
-Элементы эллипса ошибок (a, b and theta), -Стандартные отклонения широты, долготы и высоты, DOP’s.
▪ Номера используемых навигационных спутников
▪ Графическое представление эллипса ошибок . |
Рис.3.17. Окно системы |
|
позиционирования |
||
|
3.3.2.14. Окно графического распределения навигационных спутников («SkyPlot») - см. рис.3.18 Графическое представление навигационных спутников, отслеживаемые антенной аппаратуры или референцной станцией.
Содержит следующие данные:
•Алфавитно-цифровая информация, касающаяся: Высот навигационных спутников над горизонтом Азимутов навигационных спутников
•Информация о восходе и заходе навигационных
спутников