

GMA_Microprocess_systems_1
.pdfПадение напряжения на резисторе R1 изменяется пропорционально току вторичной обмотки ТА. При выбранных условно положительных направлениях напряжений трансформатора напряжения TV и падения напряжения U напряжениеU• на первичной обмотке TLV1 равно геометрической суммеТ напряжений1 U• иU•T:
U•1 =U• +U•T,
а напряжение U2 на первичной обмотке TLV2 равно геометрической разности тех же напряжений
U•2 =U• –U•T.
|
|
На рис. 1.77 показана векторная диаграмма преобразователя. |
||||
|
|
Абсолютные значения напряжений U1 и U2 |
|
|||
равны |
|
|
Т |
|||
|
|
__________________ |
||||
|
|
Т |
||||
U1 = √U2 + UT2 + 2UUT cosφ; |
||||||
|
||||||
|
|
__________________ |
|
|||
U |
2 |
= √U2 + U2 – 2UU |
T |
cosφ. |
|
|
|
T |
|
|
|||
|
|
При UT<<U получим приближенное выра- |
|
|||
жение для напряжений |
|
|||||
U = U + U × cosφ; |
|
|
Рис. 1.77. Векторная |
|||
|
|
диаграмма |
||||
U21 |
= U – UTT × cosφ. |
|
|
преобразователя |
||
Напряжения постоянного тока на выходах выпрямителей VS1, VS2 соответственно пропорциональны напряжениям U1 и U2.
Выходное напряжение преобразователя
Uвых = U3 – U4 = k1 UT cosφ = kIa,
где k – коэффициент пропорциональности; Iа – активная составляющая тока.
121
Измерительный преобразователь мощности с датчиком ЭДС Холла
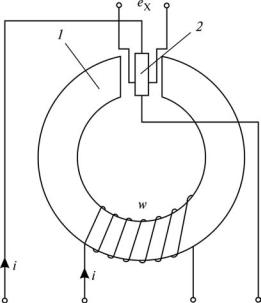
Измерительный преобразователь активной мощности с датчиком Холла (рис. 1.78).
пл
об
Рис. 1.78. Измерительный преобразователь мощности с датчиком Холла
ЭДС датчика Холла равна
ex = kx B iпл,
где В – нормальная составляющая вектора магнитной индукции; iпл – ток, протекающий на пластинке датчика Холла;
kx – чувствительность датчика Холла.
Преобразователь состоит из тороидального магнитопровода 1 с воздушным зазором, датчика Холла 2, расположенного в воздушном зазоре, и обмотки возбуждения w.
122
Ток обмотки возбуждения iоб изменяется пропорционально току контролируемой сети, а ток пластинки датчика Холла – напряжению той же сети.
Магнитная индукция изменяется пропорционально току обмотки возбуждения, поэтому для нее можно написать следующее выражение:
В = kI Im sin(ωct – φ), |
(1.12) |
где kI – коэффициент пропорциональности;
φ – угол сдвига по фазе между напряжением и током.
Ток пластинки изменяется пропорционально напряжению контролируемой сети, поэтому он определяется равенством
iпл = kU Um sin ωct, |
(1.13) |
где kU – коэффициент пропорциональности.
С учетом выражений (1.12), (1.13) найдем значение ЭДС Холла
eX = kм UI cosφ – kм UI cos(2ωc t – φ),
где kм = kX kI kU – коэффициент пропорциональности.
Как видно из полученного выражения, ЭДС имеет две составляющие: постоянную и переменную. Постоянная составляющая пропорциональна активной мощности контролируемой сети.
Переменная составляющая изменяется с двойной частотой и является помехой. Переменную составляющую можно устранить с помощью фильтра нижних частот.
Наличие фильтра приводит к росту инерционности измерительного преобразователя мощности.
1.3.7. Датчик мощности с аналоговым умножителем
Функциональная схема датчика показана на рис. 1.79.
123
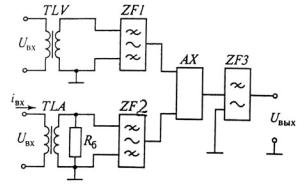
Рис. 1.79. Датчик с аналоговыми умножителями
Датчик выполнен на одном интегральном аналоговом умножителе АХ. Входные сигналы датчика поступают со вторичных измерительных трансформаторов напряжения TLV и тока TLA, нагруженного балластным резистором Rб. С измерительных трансформаторов сигналы поступают на полосовые фильтры ZF1, ZF2, которые выделяют составляющие с промышленной частотой. С выхода умножителя АХ сигнал поступает на фильтр нижних частот ZF3, задерживающий гармоническую составляющую с двойной частотой и выделяющий постоянную составляющую, пропорциональную измеряемой мощности. При измерении реактивной мощности вместо трансформатора тока TLA используется трансреактор TAV.
1.3.8. Датчик обратной мощности
Основной частью датчика является синхронный детектор, позволяющий выделить постоянную составляющую, пропорциональную косинусу угла сдвига по фазе между фазными напряжением и током.
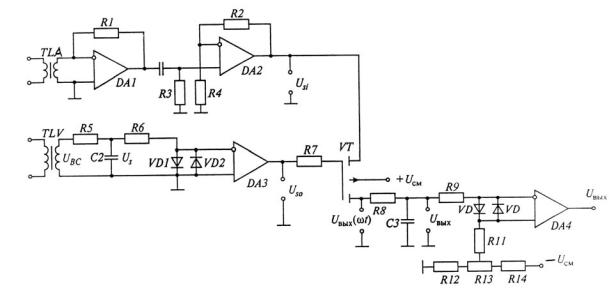
На рис. 1.80 показана упрощенная принципиальная схема датчика обратной мощности.
Линейное напряжение UАВ через вторичный трансформатор напряжения TLV подается на фазосдвигающую схему из резистора R5 и конденсатора С2.
124
BC1
C
A
B
Рис. 1.80. Датчик обратной мощности с синхронным детектором
125
Комплексная амплитуда напряжения US на конденсаторе С2 равна
U• |
=U• |
|
1 |
|
|
|
W(jω). |
|
––––––– =U• |
|
|||||
S |
|
AB |
jωR |
C |
2 |
AB |
|
|
|
|
5 |
|
|
|
|
Аргумент комплексного коэффициента
arg W(jω) = – arc tg ωR5C2.
Выбором значений сопротивления резистора R5 и емкости конденсатора С2 угол сдвига по фазе между напряжением UАВ и US делают равным – 300.
Таким образом, линейное напряжение UАВ преобразуется в фазное. Величина амплитуды напряжения US не имеет значения, так как оно подается к нуль-органу на DA3. На выходе DA3 получаем разнополярные прямоугольные импульсы одинаковой амплитуды.
Прямоугольные импульсы изменяют свой знак при переходе напряжением US нулевых значений.
Выходной сигнал USO c операционного усилителя DA3 подается на затвор полевого р-канального МОП – транзистора VT, который используется в качестве бесконтактного ключа.
Прямоугольные импульсы играют роль опорного сигнала синхронного детектора.
Входной сигнал синхронного детектора Usi образуется с помощью активного преобразователя «ток-напряжение» на операционном усилителе DA1 и неинвертирующего усилителя на операционном усилителе DA2.
Между преобразователем «ток-напряжение» и неинвертирующим усилителем имеется фазодвигающая схема из конденсатора С1 и резистора R3, позволяющая получить положительное значение угла сдвига по фазе.
С выхода усилителя входной сигнал Usi поступает к истоку полевого транзистора.
Выходное напряжение бесконтактного ключа равно произведению
126
Uвых (ωt) = Usi S(ωt).
Полевой р-канальный транзистор открывается при отрицательном потенциале на затворе, поэтому для S(ωt) можно записать
S(ωt) = { |
0 |
при U |
> 0 |
1 |
при Uso< 0 |
||
|
|
|
so |
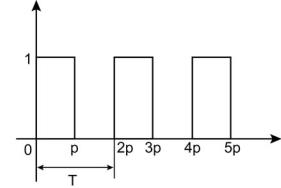
Временную функцию S(ωt) можно представить в виде однополярных прямоугольных импульсов с единичной амплитудой (рис. 1.81).
S(ωt)
ωt
Рис. 1.81. Временная функция S(ωt)
Разложение функции S(ωt) в ряд Фурье имеет следующий вид:
S(ωt) = ½ + 2/π (sinωt + 1/3 sin3ωt + 1/5 sin5ωt + …).
Запишем выражение для входного сигнала
Usi = Umi sin (ωt+φ),
тогда для выходного сигнала получим
127
Uвых (ωt)= Umi sin(ωt+φ)S(ωt)= ½Umisin(ωt+φ)+Umi /π[cosφ-cos(2ωt +φ)+ +1/3 cos(2ωt-φ) –1/3 cos(4ωt+φ)+1/5 сos (4ωt-φ) –1/5 cos (6ωt+φ)+…].
Как видно из полученного выражения, выходной сигнал имеет постоянную составляющую Umi/π cosφ и переменные составляющие с первой гармонической составляющей и четными гармониками.
Постоянная составляющая выходного сигнала выделяется с помощью ФНЧ на резисторе R8 и конденсаторе С3.
Таким образом, выходное напряжение после фильтрации будет равно
Uвых = Umi /π × cosφ.
При переходе генератора в двигательный режим угол сдвига по фазе между током фазы и напряжением изменяется на 1800, что приводит к изменению знака выходного сигнала.
Со стока транзистора выходной сигнал подается на инвертирующий вход компаратора с операционным усилителем DA4. На второй вход с делителя напряжения R12-R14 подается отрицательный потенциал.
В генераторном режиме выходное напряжение синхронного детектора имеет положительный потенциал, поэтому выходное напряжение компаратора имеет отрицательный потенциал.
При переходе генератора в двигательный режим изменяется знак выходного сигнала синхронного детектора, что при определенном значении тока генератора вызовет изменение состояния компаратора и появление на его выходе положительного потенциала.
Выходной сигнал компаратора используется в защите от обратной мощности.
128
2. МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИМИ УСТАНОВКАМИ
2.1. МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ФИРМЫ SYSTEM TECHNIC NORD – GEAPAS (ГЕРМАНИЯ)
Система обеспечивает выполнение следующих функций управления судовой электроэнергетической установкой: управление генераторными агрегатами (ГА), обеспечение одиночной или параллельной работы агрегатов, синхронизацию работы ГА, распределение активной нагрузки, пуск и остановку резервных ГА при изменении нагрузки электростанции, управление частотой вращения ГА, синхронизацию работы валогенератора с дизель-генератором, подключение питания с берега, подключение и отключение второстепенных потребителей, програмированное подключение 10 мощных потребителей, обеспечение параллельной работы с вало- и утилизационным турбогенератором, защиту генератора, самоконтроль системы управления.
Система Geapas имеет децентрализованную иерархическую структуру. На нижнем уровне для управления каждым генераторным агрегатом электростанции предусмотрен свой блок управления типа DSG 822. Причем, в зависимости от типа приводного двигателя (валоили турбины, дизель) разработан свой блок управления. Эти блоки имеют одинаковую конструкцию и различаются только программным обеспечением. В зависимости от желания и усилий пользователя блоки управления генераторными агрегатами системы могут быть использованы в качестве локальных средств управления и контроля. Их устанавливают непосредственно у агрегата, либо монтируют в генераторные панели ГРЩ или в консоли пульта управления в ЦПУ.
На верхнем уровне используется блок управления нагрузкой LSG 822. Он собирает информацию о техническом состоянии ГА и о нагрузке на шинах электростанции и выдает команды блокам DSG 822 на пуск или остановку резервных ГА.
129
Система имеет широкий набор интерфейсных устройств, что позволяет использовать блоки и модули для создания сложных систем разнообразного применения.
Блоки управления дизель-генераторными агрегатами DSG 822 и блок управления нагрузкой LSG 822 подсоединены к общей шине таким образом, что информация о состоянии каждого агрегата передается в блоки управления других агрегатов и в блок управления нагрузкой. С помощью другой шины блок управления нагрузкой LSG и (или) блоки управления агрегатами передают информацию о рабочем состоянии и контролируемых параметрах агрегатов в систему управ-
ления Geamar 100 ISM.
Система автоматически запускает и останавливает генераторные агрегаты и индицирует аварийные изменения параметров приводного двигателя и генератора во время пуска и синхронизации, а также в рабочем режиме агрегата. В случае возникновения неисправности во время пуска или в рабочем режиме агрегата причина неисправности индицируется на лицевой панели блока управления, а сам агрегат останавливается либо немедленно, либо с выдержкой времени, что определяется серьезностью положения. При этом через интерфейсную шину резервному ГА передается команда пуска. Предусмотрена возможность повторного пуска агрегата в случае неудачного пуска по какой-либо причине (низкое давление смазочного масла, разгон на воздухе больше установленного времени и т. д.).
Независимо от режима работы (ручной или автоматический) каждый ГА может быть запущен и остановлен вручную. С целью адаптации системы к управляемому объекту непосредственно пользователем предусмотрена возможность корректирования программ путем изменения уставок контролируемых параметров (пределов) и параметров процесса (времени).
Каждый из блоков управления DSG 822 имеет пять плат (рис. 2.1): микропроцессорную плату ZK 408, лицевую плату FPL 402, плату ввода-вывода EA 402, плату блока питания NEG и периферийную соединительную плату PAP 402. Все платы смонтированы в одном корпусе, который располагается на лицевой части соответствующей
130