

Глава 4. Определение направлений в море с помощью гироскопических курсоуказателей
4.1. Принцип определения направлений с помощью
Гирокомпасов и гироазимутов
Магнитный компас был первым в истории мореплавания прибором для ориентированияв море по направлению.
Достоинства этого компаса:
немедленная готовность к работе;
простота устройства;
относительная дешевизна производства;
высокая надежность и долговечность.
Основной его недостаток– невысокая точность показаний.
Источниками погрешностей магнитного компаса являются:
неточное знание элементов земного магнетизма;
нестабильность корабельного (судового) магнитного и электромагнитного полей;
ускорения, сообщаемые магнитной системе компаса на качкеи при изменениисудном курса и скорости;
трение в подвесе магнитной системы.
И хотя в настоящее время его наличие обязательно на каждом судне, магнитный компас используется в качестве резервного курсоуказателя.
Основными приборами курсоуказания являются сейчас гироскопические курсоуказатели: гирокомпас, гироазимут, гироазимут-горизонт и др.
Основой всех гироскопических курсоуказателей является гироскоп (быстро вращающееся твердое тело), а работа этих курсоуказателей основанана свойстве гироскопа сохранять неизменным направление оси вращения в пространстве без действиямоментов внешних сил.
Если взять идеально изготовленный свободный гироскоп (центр тяжести совпадает с его геометрическим центром и исключены силы трения в осях его подвеса), то его главная ось будет сохранять свое направление в пространстве постоянным, но такой гироскоп не будет постоянно указывать направление меридиана, т.е. учитывать суточное вращение Земли.
В гирокомпасахэлементом, указующим направление меридиана, служит чувствительный элемент (ЧЭ), представляющий собой гиросферу с двумя гироскопами, соединенными между собой так, что может изменяться угол между их осями.Кроме того, центр тяжести ЧЭ гирокомпаса смещен относительно центра подвеса на определенную величину.
Смещение центра тяжести ЧЭ гирокомпаса вниз относительно центра подвеса приводит к тому, что главная ось гироскопа, будучи отклоненной от меридиана, с течением времени будет поворачиваться относительно центра подвесав сторону меридианаи через какое-то время «придет в меридиан». Время прихода в меридиан зависит от начального угла отклонения ЧЭ от истинного меридиана и широты места.
(от 2,5 до 7 часов) – от т.Iдо т.VIII(рис. 4.1).
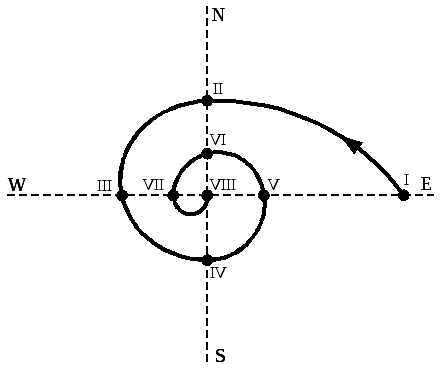
Рис. 4.1. Кривая прихода гирокомпаса в меридиан
Для сокращения этого времени гирокомпасы имеют устройство для ускоренного приведения в меридиан.Если с помощью такого устройства установить и удерживать ЧЭ ГК в меридиане с точностью до 2¸3°, то время прихода в положение равновесия сокращается до1¸1,5 часов (min 45 мин.)
Главная ось ЧЭ работающего ГК на движущемся судне вследствие наличия динамическихистатических погрешностей располагается по направлению гироскопического меридиана, не совпадающего с истинным меридианом.
Динамические погрешности:
скоростная погрешность, которая возникает вследствие угловой скорости вращения плоскости истинного горизонта из-за движения судна по поверхности Земли. Эта погрешность устраняется в ГК с помощью специального счетно-решающего механизма-корректора ГК (вводом в негоИК, V, j);
инерционные погрешностиIиIIрода, которые возникают при изменении курса и скорости судна. ГК по окончании маневра приходит в новое положение равновесия через 25-30 мин. Эти погрешности устраняются в ГК регулировкой периода незатухающих колебаний ЧЭ ГК (84,3 мин.) и применением масляного успокоителя в ЧЭ;
погрешность от качки, которая обусловлена раскачиванием ЧЭ ГК относительно его главной оси. Исключается стабилизацией ЧЭ в плоскости горизонта.
Статические погрешности:
наличие трения в подвесах гиромоторов;
непостоянство скорости вращения роторов гиромоторов;
неточная установка основного прибора в ДП судна;
действие магнитных полей.
Эти погрешности, характеризующие устойчивость работы ГК на неподвижном основании, определяются опытным путем.
Если удастся исключить все указанные погрешности, то главная ось ЧЭ ГК устанавливаетсяв направлении истинного меридиана(NИ), а следящая система позволяет непосредственно снимать это направление и передавать на репитеры ГК.
Направляющий момент ГК во много раз больше, чем у МК, и не зависит от магнитного поля Земли. Однако с увеличением широты (j) он уменьшается пропорциональноcosj, и в высоких широтах (> 75°) ГК работает менее надежно.
Другой вид гироскопического указателя – гироазимут –работает устойчиво как в низких, так и в высоких широтах.
Гироазимутами (ГА) называются гироскопические приборы, предназначенныедля сохранения заданного азимутального направления.
В гироазимутах применяются гироскопы с подвесом на шарикоподшипниках или с аэродинамическим подвесом. Первый представляет собой гирокамеру, в которой на шарикоподшипниковых опорах вращается дисковый ротор с утяжеленным ободом. У второго гироскопа ротор, имеющий форму шара, при работе находится во взвешенном в воздухе состоянии (шаровой гироскоп).
В отличии от ГК у ЧЭ любого ГА его центр тяжести должен быть совмещен с точкой подвеса.По этой причине ГА не обладает избирательностью по отношению к плоскости меридиана, но и не имеет инерционных погрешностей.
С помощью системы горизонтальной коррекцииглавная ось ЧЭ ГА принудительно удерживается в плоскости горизонта.
С помощью азимутального корректорасоздается момент внешней силы, который вызываетпрецессию главной оси ЧЭ ГАв плоскости горизонта, что ипозволяет ГА сохранять неизменным свое первоначальное направление(учитываются:1)w– угловая скорость вращения Земли;2)R– радиус Земли;3) j– широта места;4) V– скорость судна;5)ИК– истинный курс судна;6) wД– угловая скорость остаточного дрейфа ЧЭ ГА).
Из-за неточного знания j, V, ИК, wД– фактическая скорость прецессии главной оси ЧЭ ГА будет отличаться от ее действительной величины. Это различие приведет к появлению изменяющейся во времени погрешности курса.
Общая погрешность ГА включает в себя:
широтнуюпогрешность (текущая широта –jТотличается от расчетнойj0);
скоростнуюпогрешность (maxпри плавании в высоких широтах и на больших скоростях);
погрешность от дрейфа(имеет сложный характер).
Основным критерием качества работы ГА является остаточная скорость ухода.