

2 Схема и параметры манипулятора
На рисунке 2.1 представлена схема манипулятора. В таблице 1 представлены параметры электропривода.
Далее перечислены
необходимые параметры звеньев
манипулятора:
 ,
, ,
, ,
, ,
, ,
, ,
,
 ,
, ,
, ,
, ,
q4=0.
Номер сочленения манипулятора: 1.
,
q4=0.
Номер сочленения манипулятора: 1.
y
x z





























































Рисунок 2.1 схема манипулятора
Таблица 1
|
№ пп |
|
Ом |
|
|
|
|
|
Фазовые координаты |
|
4 |
0.005 |
0.56 |
160 |
130 |
0.02 |
0.02 |
0.0001 |
Положение, скорость, ток |

3 Вывод обобщённого момента для первого звена.
Выражения под номером 1 описывают потенциальную энергию манипулятора.
Кинетическая энергия манипулятора описывается выражением под номером 4 и является суммой кинетической энергии поступательного движения центра масс и вращательной относительно центра масс.


 (1)
(1)

Кинетическая энергия вращения относительно оси Оу описана выражениями под номером 2.

 (2)
(2)
 .
.



























Рисунок 3.1 Схема поступательного движения в плоскости XY
Кинетическая энергия поступательного движения в плоскости XY (Рисунок 3.1) описана выражениями под номером 3.
 (3)
(3)

 (4)
(4)
Обобщённый момент первого звена описывается выражением под номером 5.
 (5)
(5)
4 Прямая задача кинематики
Прямая задача кинематики решается путём применения представления Денавита-Хартенберга для описания поступательных и вращательных связей между звеньями.
На рисунке 4.1 представлена схема манипулятора, на которой изображены системы координат звеньев, сформированные исходя из определённых правил.






































































Рисунок 4.1 схема манипулятора для решения ПЗК
Значение обозначений с рисунка 4.1 представлены в таблице 2.
Таблица 2
|
|
0 |
|
|
|
0 |
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
0 |
|
|

























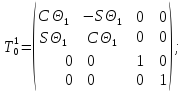
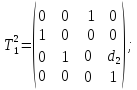
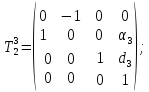
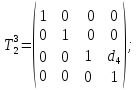
Далее представлены сформированные однородные матрицы, описывающие положение системы координат каждого звена, относительно системы координат предыдущего звена. Это позволяет последовательно преобразовать координаты схвата в абсолютной системе координат:

5 Синтез ску стабилизирующего параметры дифференциального уравнения электропривода
Выражением 6
описано дифференциальное уравнение
электропривода постоянного тока,
значение момента развиваемого
электроприводом находится из выражения
7. Подставим в дифференциальное уравнение
электропривода выражение 7, получим
дифференциальное уравнение под номером
8, при этом учтём следующее:

 (6)
(6)
 (7)
(7)
 (8)
(8)
Для синтеза СКУ необходимо уравнение, описывающее желаемый вид дифференциального уравнения электропривода, примем за желаемый вид уравнение нагруженного электропривода под номером 9.
 (9)
(9)
Выразив старшую производную из выражения 9 и подставив её в уравнение 8, получим желаемый закон управления под номером 10, где:


 .
.
 (10)
(10)
6 Метод акор по квадратичному критерию для самонастраивающегося электропривода
На Рисунке 6.1 представлена схема электропривода постоянного тока после введения СКУ.
В качестве Фазовых координат для метода АКОР выбраны положение вала электропривода его скорость вращения и ток обмотки якоря.
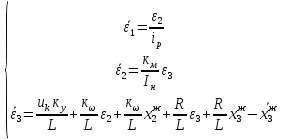
Используя схему
на рисунке 6.1 выразим фазовые координаты
в систему уравнений в форме Коши(11), где:































Рисунок 6.1 схема электропривода после введения СКУ
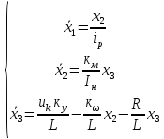 (11)
(11)
Запишем систему 11 в форме пространства состояния матрицы А и В под номером 12.
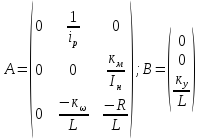 (12)
(12)
Перепишем систему (11) относительно вектора ошибок:
 .
Полученная система представлена под
номером 13.
.
Полученная система представлена под
номером 13.
 ;
;
 (13)
(13)
Закон управления представлен под номером 14.
 (14)
(14)
Матрицы коэффициентов
усиления
 находятся из выражений под номером 15,
где:
находятся из выражений под номером 15,
где: .
.
 ;
;
 (15)
(15)
Для определения матрицы K необходимо решить алгебраическое уравнение Риккати (16).
 (16)
(16)
Для определения
коэффициентов матриц
 и
и можно использовать метод Мэриэма. В
основе метода лежит предположение о
том, что максимально допустимые отклонения
всех фазовых координат в каждый момент
времени вносят в функционал (17) одинаковый
вклад, а их полный вклад равен суммарному
вкладу управляющих сигналов, каждый из
которых также вносит одинаковый вклад
в указанный функционал. Исходя из этого,
можно записать выражения (18).
можно использовать метод Мэриэма. В
основе метода лежит предположение о
том, что максимально допустимые отклонения
всех фазовых координат в каждый момент
времени вносят в функционал (17) одинаковый
вклад, а их полный вклад равен суммарному
вкладу управляющих сигналов, каждый из
которых также вносит одинаковый вклад
в указанный функционал. Исходя из этого,
можно записать выражения (18).
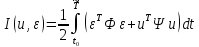 (17)
(17)
 ;
;
 ;
(18)
;
(18)
 .
.
Примем
 и
и ,
а также целесообразно принять матрицы
,
а также целесообразно принять матрицы и
и диагональными, где:
диагональными, где: .
Тогда функционал (17) примет следующий
вид:
.
Тогда функционал (17) примет следующий
вид:
 (19)
(19)
Исходя из желаемых
значений точности и амплитуды управляющего
сигнала, а также используя выражения
под номером 18, получим значение
 .
.
Матрица
 имеет вид:
имеет вид:
 .
(20)
.
(20)
Используя пакет приложений MATLAB решим уравнение Риккати (16), получим матрицу коэффициентов К, подставив её в выражения (15) получим матрицы (21).
 (21)
(21)