

ЛЕКЦИЯ 6 Прин.постр.приб 4ч
.docЛЕКЦИЯ 6. (3.4) ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ПРИБОРОВ.
Измерительная цепь прибора представляет собой различное сочетание (соединение) преобразователей. Условным изображением структуры прибора является его структурная схема, отображающая, с одной стороны, порядок соединения преобразователей, а следовательно, и последовательность преобразования сигналов, с другой стороны, функции преобразования, заданные в виде статической характеристики, чувствительности, передаточной функции и т. д. Следовательно, структурная схема может быть использована как для описания или определения основных принципов построения приборов, так и для определения их характеристик по известным характеристикам преобразователей.
В соответствии с рассмотренной в п. 3.2 классификацией приборов они подразделяются на приборы прямого и уравновешивающего преобразования. При этом соединение звеньев (преобразователей) в схеме может быть последовательным, параллельным согласным или встречным и комбинированным. При последовательном соединении звеньев (рис. 3.10, а) выходные сигналы в статическом режиме
![]()
Статическая характеристика измерительной цепи определяется как
![]() .
(3.10)
.
(3.10)
Чувствительность в этом случае будет равна произведению чувствительности звеньев:
 (3.11)
(3.11)
а передаточная функция — произведению передаточных функций:
 (3.12)
(3.12)
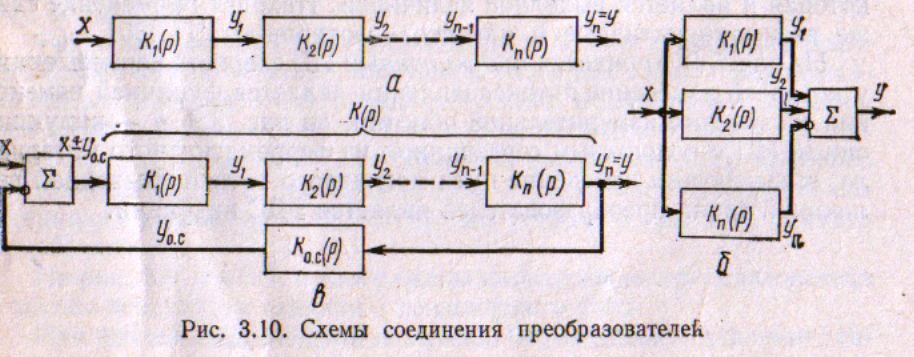
При параллельном согласном соединении звеньев (рис. 3.10, б) входной сигнал поступает на каждое звено, а выходной равен сумме выходных сигналов звеньев:
 (3.13)
(3.13)
Продифференцировав (3.13) по х, получим
![]()
то есть чувствительность при этом равна сумме чувствительностей звеньев:
 (3.14)
(3.14)
а передаточная функция — сумме передаточных функций звеньев:
 (3.15)
(3.15)
Для
параллельного встречного соединения
(рис. 3.10,
в)
(с обратной связью) выходной сигнал
последовательного соединения звеньев
или прямой цепи через звено обратной
связи снова подается на вход. Если знаки
входной величины
![]() и сигнала
и сигнала
![]() совпадают, то имеет место положительная
обратная связь, в противном случае —
отрицательная.
совпадают, то имеет место положительная
обратная связь, в противном случае —
отрицательная.
До
введения обратной связи, то есть
![]() ,
связь между выходным и входным
сигналами, преобразованными по Лапласу,
на основании (3.12) может быть представлена
как
,
связь между выходным и входным
сигналами, преобразованными по Лапласу,
на основании (3.12) может быть представлена
как

где
![]() —
передаточная функция прямой цепи.
—
передаточная функция прямой цепи.
После введения обратной связи зависимость между выходной и входной величинами будет
![]()
где
![]() —
передаточная функция цепи обратной
связи.
—
передаточная функция цепи обратной
связи.
Подставив
значение
![]() получим
зависимость
получим
зависимость
![]()
или после преобразований — передаточную функцию измерительной цепи с обратной связью:
Знак «плюс» соответствует отрицательной обратной связи, а знак «минус» — положительной.

Для
определения чувствительности,
продифференцировав входной сигнал
прямой цепи
![]() ,
получим
,
получим

или, так как
после замены и преобразований:
 (3.16)
(3.16)
Здесь
![]() —
чувствительность прямой цепи,
—
чувствительность прямой цепи,
 —
чувствительность цепи обратной
связи. Знак «минус» соответствует
положительной обратной связи, а знак
«плюс» — отрицательной.
—
чувствительность цепи обратной
связи. Знак «минус» соответствует
положительной обратной связи, а знак
«плюс» — отрицательной.
Для определения характеристик измерительных цепей с комбинированным соединением звеньев поступают следующим образом: разбивают измерительную цепь на участки, где имеется только последовательное и параллельное согласное или встречное соединение звеньев; определяют характеристики этих участков и заменяют их эквивалентными звеньями; если схема снова содержит комбинированное соединение, разбивку повторяют до тех пор, пока схема не будет приведена к одному из рассмотренных соединений; после этого определяют характеристики измерительной цепи в целом.
В измерительных цепях прямого преобразования используются последовательное и (или) параллельное согласное соединение звеньев. Приборы с этими цепями просты, надежны, имеют малую массу и габариты. Однако погрешности таких приборов, в сравнении с приборами уравновешивающего преобразования, велики.
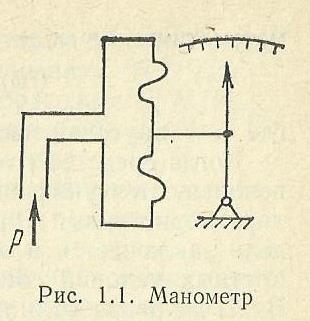
Примером
измерительной цепи прямого преобразования
с генераторными преобразователями
может быть цепь механического манометра
(см. рис. 1.1) с цепочкой преобразований
![]() Цепочке соответствует структурная
схема (рис. 3.11) с передаточными функциями
Цепочке соответствует структурная
схема (рис. 3.11) с передаточными функциями
![]() ,
которые могут быть получены из
функциональных зависимостей (1.1).
,
которые могут быть получены из
функциональных зависимостей (1.1).
=========================
![]() (1.1)
(1.1)
==============================================
В большинстве случаев энергия чувствительного элемента недостаточна или ее непосредственно нельзя использовать для передачи сигнала и формирования выходного сигнала, например, в виде отклонения стрелки или перемещения указателя показывающего прибора. Поэтому в измерительную цепь включают последовательно или параллельно промежуточные и передающие преобразователи, выполняющие функции усиления, изменения физического рода сигнала, модуляции, демодуляции и др. Кроме того, в измерительную цепь могут быть включены преобразователи для повышения точности, надежности, увеличения быстродействия и др.
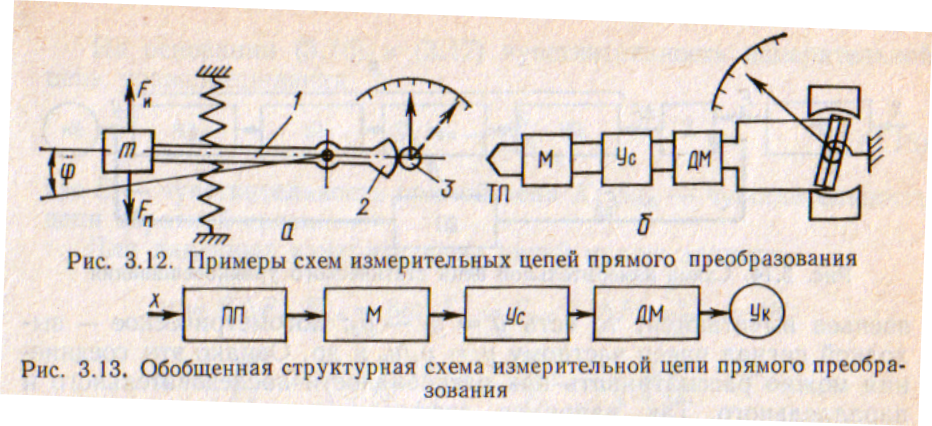
В качестве примеров рассмотрим две схемы измерительных цепей прямого преобразования (рис. 3.12).
На
рис. 3.12,
а
показана схема для измерения угловых
ускорений. При возникновении ускорения
![]() на тело с массой
т
действует сила инерции
на тело с массой
т
действует сила инерции
![]() ,
которая сместит рычаг 1 от положения
равновесия и через сектор
2
и трибку 3 вызовет поворот стрелки
прибора. Отклонению рычага будет
противодействовать сила упругости
пружины
,
которая сместит рычаг 1 от положения
равновесия и через сектор
2
и трибку 3 вызовет поворот стрелки
прибора. Отклонению рычага будет
противодействовать сила упругости
пружины
![]() .
При
равенстве инерционного и упругого
моментов сил отсчитывается угол поворота
стрелки указателя, пропорциональный
ускорению
.
При
равенстве инерционного и упругого
моментов сил отсчитывается угол поворота
стрелки указателя, пропорциональный
ускорению
![]() .
.
Прибор для измерения температуры в общем случае (рис. 3.12,6) состоит из термопары ТП, модулятора ДА, усилителя Ус, демодулятора ДМ и милливольтметра. ЭДС термопары модулируется, усиливается и после дистанционной передачи и демодуляции подается на милливольтметр. В простейшем случае, если нет необходимости усиливать и передавать информацию по каналу, ЭДС можно подавать непосредственно на милливольтметр для определения значения.
На рис. 3.13 приведена обобщенная схема измерительной цепи прямого преобразования, которая включает: первичный преобразователь, выполняющий функции восприятия входного сигнала и формирования сигнала, удобного для дальнейших преобразований; модулятор; усилитель; демодулятор и указатель Ук или регистрирующее устройство.
Определение статической характеристики, передаточной функции, чувствительности и других характеристик приборов прямого преобразования производится в соответствии с используемыми схемами соединения преобразователей — параллельным согласным и последовательным — на основании зависимостей (3.10)...(3.15).
В
приборах также могут быть использованы
другие соединения звеньев, например:
дифференциальное — выходные сигналы
двух звеньев вычитаются, то есть
![]() ;
логометрическое
— выходной сигнал равен частному
;
логометрическое
— выходной сигнал равен частному
![]() и
др. Однако эти соединения можно
рассматривать как разновидности
последовательного и параллельного.
Так, например, дифференциальное и
логометрическое — это параллельное
соединение двух звеньев. Разница лишь
в последующей операции преобразования
— вычитание и деление, а не суммирование
сигналов.
и
др. Однако эти соединения можно
рассматривать как разновидности
последовательного и параллельного.
Так, например, дифференциальное и
логометрическое — это параллельное
соединение двух звеньев. Разница лишь
в последующей операции преобразования
— вычитание и деление, а не суммирование
сигналов.
Параметрические преобразователи (в основном электрические) используются в измерительных цепях в виде делителей, равновесных и неравновесных мостов [4, 35].
Измерительные цепи уравновешивающего преобразования.
Измерительные цепи уравновешивающего преобразования делятся на цепи со статическим, астатическим и развертывающим уравновешиванием.
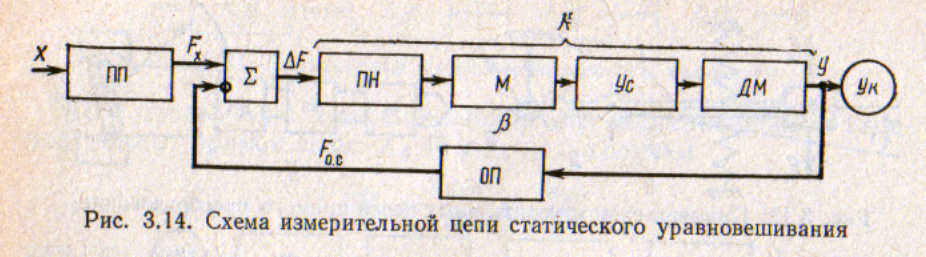
На рис 3.14 приведена обобщенная схема измерительной цепи статического уравновешивания [2], в которой можно выделить две основные цепи: прямого преобразования К (аналогично схеме рис. 3.13) и обратной связи, представленной обратным преобразователем ОП. При этом соединение звеньев является комбинированным, хотя основная часть — схема с параллельным встречным соединением.
Как
следует из схемы, выходной сигнал
формируется в прямой цепи К, состоящей
из преобразователя неравновесия ПН,
модулятора М, усилителя Ус и демодулятора
ДМ. На вход преобразователя неравновесия
поступает сигнал
![]() ,
равный
разности между выходными сигналами
Fx
первичного
преобразователя и
Foc
обратной
связи, то есть
,
равный
разности между выходными сигналами
Fx
первичного
преобразователя и
Foc
обратной
связи, то есть
![]()
Следовательно,
выходной сигнал у является функцией
сигнала неравновесия
![]() ,
а не входного сигнала
х
или
Fx:
,
а не входного сигнала
х
или
Fx:
![]() .
(3.17)
.
(3.17)
Обратный
преобразователь предназначен, во-первых,
для формирования сигнала, однородного
с измеряемой величиной или выходным
сигналом ПП, во-вторых,— для уравновешивания
или компенсации этого сигнала. Как
следует из (3.17), сигнал неравновесия
![]() в
цепях статического уравновешивания
должен быть отличным от нуля при
в
цепях статического уравновешивания
должен быть отличным от нуля при
![]() .
.
На основании (3.16) и (3.17) чувствительность измерительной цепи уравновешивания
 (3.18)
(3.18)
где
S
— чувствительность прямой цепи К;
![]() —
чувствительность цепи обратной связи.
—
чувствительность цепи обратной связи.
Для линейных измерительных цепей можно записать

![]()
где
К — коэффициент преобразования прямой
цепи;
![]() — коэффициент преобразования цепи
обратной связи;
— коэффициент преобразования цепи
обратной связи;
![]() — глубина уравновешивания;
— глубина уравновешивания;
![]() — относительное неравновесие;
— относительное неравновесие;
![]() — глубина уравновешивания
(относительная).
— глубина уравновешивания
(относительная).
Тогда чувствительность измерительной цепи уравновешивания определяется как
 (3.19)
(3.19)
Следовательно,
чувствительность приборов с измерительными
цепями статического уравновешивания
в
![]() раз меньше в сравнении с цепями
прямого преобразования. Однако они
имеют достаточно широкий диапазон
измерения, хорошее быстродействие, а
погрешность в сравнении с цепями прямого
преобразования уменьшается в
раз меньше в сравнении с цепями
прямого преобразования. Однако они
имеют достаточно широкий диапазон
измерения, хорошее быстродействие, а
погрешность в сравнении с цепями прямого
преобразования уменьшается в
![]() раз [4].
раз [4].
Для определения передаточной функции прибора статического уравновешивания измерительную цепь разобьем на участки, содержащие схему соединения с обратной связью, первичный преобразователь и указатель. После определения на основании (3.15) передаточной функции участка с обратной связью получим последовательное соединение первичного преобразователя, эквивалентного звена и указателя. Тогда на основании (3.12) передаточная функция прибора
где
![]() и
и
![]() —
передаточные функции первичного
преобразователя и указателя;
—
передаточные функции первичного
преобразователя и указателя;
![]() и
и
![]() — передаточные функции прямой цепи К
и цепи обратной связи.
— передаточные функции прямой цепи К
и цепи обратной связи.
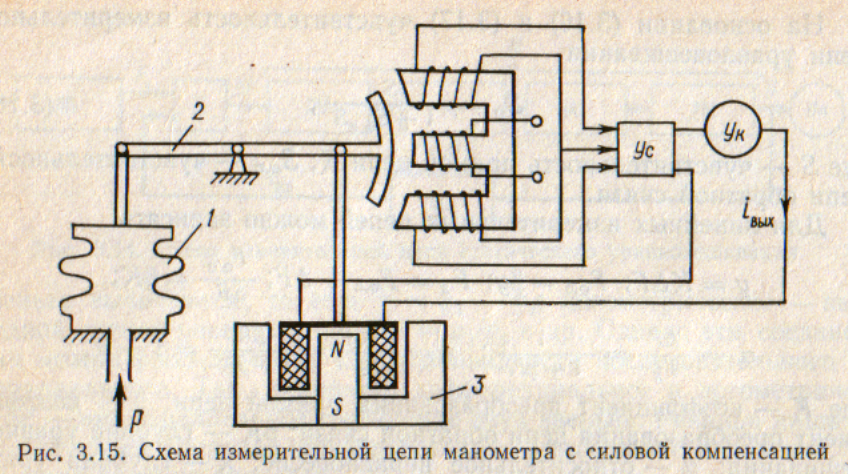
Примером
приборов статического уравновешивания
могут быть приборы, в которых реализуется
силовая компенсация. На рис. 3.15 приведена
схема измерительной цепи манометра со
статическим уравновешиванием.
Давление
р
вызывает деформацию сильфона 1, под
действием которой рычаг
2
отклонится от состояния равновесия.
Отклонение в трансформаторном
преобразователе преобразуется в
электрический сигнал, который после
усиления и выпрямления в усилителе Ус
поступает на указатель Ук и обмотки
магнитоэлектрического преобразователя
3, связанного с рычагом 2.
Магнитоэлектрический преобразователь
в результате взаимодействия тока
![]() в обмотках с полем постоянного магнита
создает силу, уравновешивающую силу,
развиваемую сильфоном, и, таким образом,
препятствует перемещению рычага. При
этом чем больше измеряемое давление,
тем больше ток 1вых
и развиваемое усилие. Таким образом, с
точностью до статической погрешности
рычаг будет удерживаться в среднем
положении, а ток
в обмотках с полем постоянного магнита
создает силу, уравновешивающую силу,
развиваемую сильфоном, и, таким образом,
препятствует перемещению рычага. При
этом чем больше измеряемое давление,
тем больше ток 1вых
и развиваемое усилие. Таким образом, с
точностью до статической погрешности
рычаг будет удерживаться в среднем
положении, а ток
![]() в обмотках преобразователя и показания
прибора будут пропорциональны измеряемому
давлению.
в обмотках преобразователя и показания
прибора будут пропорциональны измеряемому
давлению.
Отличительной
особенностью
измерительных цепей астатического
уравновешивания
(рис. 3.16) является наличие в прямой цепи
интегрирующего устройства ИУ. При этом
в статическом режиме (х
= const)
без учета погрешностей достигается
полное уравновешивание, то есть
![]() или
или
![]() .
.

В
качестве ИУ обычно используются
электродвигатели, обладающие
достаточной мощностью для цепей
регистрации информации, регулирования,
управления и др. Возможно использование
и других ИУ, интегрирующих цепей,
интегрирующих усилителей, счетчиков
дискретных величин и др. При этом ИУ в
измерительной цепи можно трактовать
как элемент памяти. Действительно, если
в качестве ИУ используется
электродвигатель, то при обработке
рассогласования его ось повернется
на угол
![]() ,
пропорциональный
х. Но
как только наступит равновесие
,
пропорциональный
х. Но
как только наступит равновесие
![]() ,
двигатель становится, а состояние
равновесия останется (запомнится) до
тех пор, пока не изменятся
,
двигатель становится, а состояние
равновесия останется (запомнится) до
тех пор, пока не изменятся
![]() или
или
![]() .
.
Определение передаточной функции прибора с астатическим уравновешиванием может быть выполнено аналогично случаю статического уравновешивания. При этом, согласно рис. 3.16, в прямой цепи дополнительно включено интегрирующее устройство, выходной сигнал которого непосредственно является выходной величиной у. Тогда передаточная функция примет вид

где
![]() ,
,![]() —
передаточные функции первичного
преобразователя и цепи обратной
связи;
—
передаточные функции первичного
преобразователя и цепи обратной
связи;
![]() ,
,
![]() — передаточные функции интегрирующего
устройства и прямой цепи К.
— передаточные функции интегрирующего
устройства и прямой цепи К.
Статическая характеристика измерительной цепи без учета погрешностей определяется из условия при х = const:
![]() .
.
Так
как
![]() то
то
 (3.22)
(3.22)
где
![]() —
коэффициенты преобразования первичного
преобразователя и цепи обратной
связи.
—
коэффициенты преобразования первичного
преобразователя и цепи обратной
связи.
На основании статической характеристики чувствительность прибора
 (3.23)
(3.23)
где
![]() —
чувствительность первичного преобразователя
и цепи обратной связи.
—
чувствительность первичного преобразователя
и цепи обратной связи.
Чувствительность
прибора может быть определена также из
передаточной функции. Если положить,
что
![]() ,
то
,
то
В статическом режиме х = const или р = О
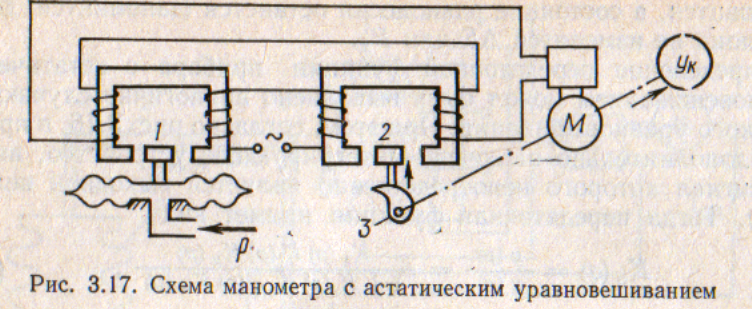
Примером прибора с астатическим уравновешиванием является манометр (рис. 3.17). В качестве интегрирующего устройства, как видно из рисунка, используется двигатель М, который работает до тех пор, пока есть рассогласование между сигналами индуктивных датчиков 1 и 2. Якорь датчика 1 перемещается в результате деформации манометрической коробки, воспринимающей давление р. Якорь датчика 2 перемещается при повороте кулачка 3, находящегося на одной оси с двигателем. Угол поворота оси двигателя также является и выходным сигналом, который регистрирует указатель. В качестве устройств сравнения сигналов Fox, и Fx (см. рис. 3.16) могут использоваться делители тока и напряжения, мостовые схемы, механические рычаги, дифференциалы, дифференциальные схемы, как это имеет место для манометра (рис. 3.17), и др.
Основными достоинствами измерительных цепей астатического уравновешивания являются возможность прямого отсчета показаний по сигналу ИУ и значительная выходная мощность, например на валу двигателя, достаточная для записи сигнала в любом регистрирующем устройстве или системе.
К основным недостаткам относятся: малый диапазон измерений, малое быстродействие (в случае использования двигателя), возможность появления автоколебаний и потери устойчивости при увеличении глубины астатического уравновешивания. Для устранения автоколебаний используются цепи развертывающего уравновешивания.

Отличительной особенностью аналоговых приборов развертывающего уравновешивания [4, 12], или динамической компенсации, являются периодический характер уравновешивания и дискретность представления результата измерения. На рис. 3.18 представлена структурная схема измерительной цепи развертывающего уравновешивания, которая состоит из первичного преобразователя ПП, прямой цепи К, обратного преобразователя ОП, генератора выходного сигнала Гу, реле (ключа) Р и регистрирующего устройства РУ.
Генератор,
которым может быть двигатель, за один
период (цикл) измерения по определенной
программе формирует все возможные
значения
у(t)•
Этот сигнал поступает на реле, а также
через обратный преобразователь на
устройство сравнения. Сигнал рассогласования
![]() поступает в прямую цепь, где преобразователь
неравновесия ПН, усилитель Ус и
формирователь Ф вырабатывают сигнал
для замыкания реле только в момент
времени, когда
поступает в прямую цепь, где преобразователь
неравновесия ПН, усилитель Ус и
формирователь Ф вырабатывают сигнал
для замыкания реле только в момент
времени, когда
![]() или
или
![]() Следовательно,
прямая цепь выполняет в данном случае
функции нуль-органа, а не формирования
сигнала, пропорционального
Следовательно,
прямая цепь выполняет в данном случае
функции нуль-органа, а не формирования
сигнала, пропорционального
![]() ,
как это имело место в измерительных
цепях статического или астатического
уравновешивания. При этом значение
сигнала
у
(х) регистрируется дискретно — один раз
за период.
,
как это имело место в измерительных
цепях статического или астатического
уравновешивания. При этом значение
сигнала
у
(х) регистрируется дискретно — один раз
за период.
В приборах развертывающего уравновешивания, ввиду отсутствия замкнутой цепи, исключена возможность возникновения автоколебаний, их параметры не ограничиваются условиями обеспечения устойчивости.
3.5. ГОСУДАРСТВЕННАЯ СИСТЕМА ПРИБОРОВ
ГСП создана с целью экономически и технологически целесообразного решения проблемы обеспечения техническими средствами систем контроля, регулирования и управления технологическими процессами, научных исследований и других отраслей народного хозяйства.
Согласно ГОСТ 12997—84, Государственная система промышленных приборов и средств автоматизации (ГСП) представляет собой совокупность изделий, предназначенных для получения, обработки и использования информации, обеспечивающих информационное (метрологическое и функциональное), энергетическое и конструктивное сопряжение изделий и автоматизированных систем, а также экономически целесообразную точность, надежность и долговечность.
По функциональному признаку изделия ГСП [38] подразделяются на устройства для:
получения информации о состоянии процесса; приема и выдачи информации в каналы связи; преобразования, хранения и обработки информации; использования информации в целях воздействия на процессы и связи с оператором;
выполнения нескольких функций, перечисленных выше. Каждая из групп устройств, в свою очередь, делится на ряд датчиков, изделий или устройств. Так, устройства для получения информации о состоянии процесса делятся на измерительные и релейные датчики: температуры, давления, разности давлений и разрежения; мгновенного и суммарного расхода твердых, жидких и газообразных веществ; массы и силы; уровня жидких и сыпучих веществ; состава и свойств газов, жидкостей, твердых и сыпучих веществ; электрических и магнитных величин; величин ионизирующих излучений; механических перемещений, а также устройства формирования оператором нормированной информации.
Дальнейшим развитием ГСП является создание агрегатированных комплексов, в состав которых входят комплексы широкого и специализированного назначения.
Комплексы широкого назначения: АСПИ — средств сбора и первичной обработки информации; АСКР — средств контроля и регулирования; АСЭТ — средств электроизмерительной техники; АССТ — средств систем телемеханики; АСВТ — средств вычислительной техники; АСПУ — средств программного управления;
КТС ЛИУС — комплекс технических средств для локальных информационно-управляющих систем.
Специализированные комплексы: АСАТ — средств аналитической техники; АСНК — средств неразрушающего контроля; АСХТ — средств хронометрической техники; АСИГ1 — испытания материалов и конструкций на прочность; АСГТ — средств геофизической техники; АСОТ — средств организационной техники; АКДИ — дозаторов непрерывного действия; АКТУ — тахометрических устройств; АПИР — пирометров излучения радиационных; АСИВ — средств измерения вибраций.
Технические требования к изделиям ГСП закреплены в комплексе государственных и отраслевых стандартов, в который входят общие стандарты, распространяющиеся на все виды изделий ГСП, и групповые, охватывающие отдельные виды изделий.
Начиная с 70-х годов, практически все вновь разрабатываемые технические средства реализуются в рамках унифицированных агрегатированных комплексов, использующих системотехнические основы и принципы построения ГСП (АСВТ, АПИР, АСЭТ и др.).
В настоящее время в составе ГСП выпускается более 2000 типов промышленных приборов и средств автоматизации, в том числе для измерения механических величин более 230 типов.
Разработанный в 70-х годах Институтом проблем управления АН СССР кадастр величин и параметров, подлежащих измерению, включает более 2000 наименований, в том числе механические и тепловые величины: массу, плотность, удельный объем, силу, момент, давление, вакуум, энергию, мощность, вязкость, расход (объемный), расход массовый, температуру, количество теплоты, теплоемкость, удельную теплоемкость, коэффициент теплоотдачи, тепловой поток, теплопроводность, коэффициент теплопроводности, температурный коэффициент, тепловое сопротивление.