

Теорема об изм_ КЭ
.pdfx = x0 |
+ |
|
m |
ln |
v |
2 |
|
|||
|
|
|
0 |
. |
||||||
|
2k |
2 |
||||||||
|
|
|
|
|
|
v |
k |
|||
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
2 |
|
|
|
x |
||
mvk |
− |
mv0 |
|
= − ∫ kV 2 dx . |
||||||
2 |
|
|||||||||
|
|
|
2 |
|
|
x0 |
||||
|
|
|
|
|
|
|
|
|||
Интеграл, стоящий в правой части теоремы, вычислить нельзя, поскольку неизвестна функция f = V (x) .
ПРИМЕР 3.2
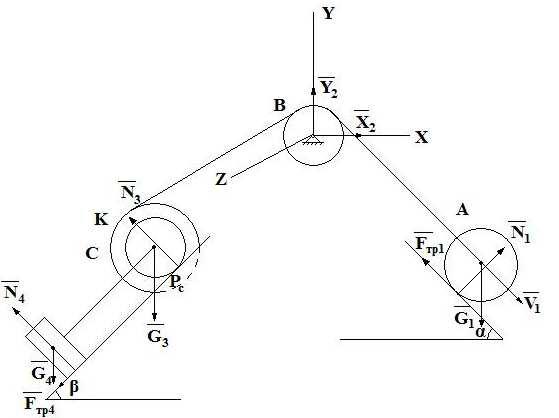
Для нанесения полимерных покрытий на криволинейную поверхность используется механизм, схема которого указана на рисунке 3.2. Вычислить кинетическую энергию данного механизма, состоящего из звеньев длины
AB = 3l, BC4 = 8l, соединенных шарнирно, и барабана D радиуса R и массой 3m . Массы однородных стержней соответственно равны m, 2m, 3m . Звено O1 A вращается с угловой скоростью ω1 . Расстояние O1O2 = 5l , BO2 = 3l . В положении, указанном на рисунке, ÐO1 AB = α и ÐO1O2 B = β .
РЕШЕНИЕ
T = T1 + T2 + T3 + T4 ,
где T1,T2 и T3 - кинетические энергии стержней O1 A , AB и BC4 , а T4 - кинетическая энергия барабана D .
Кинетическая энергия стержня, вращающегося вокруг неподвижной оси O1 перпендикулярной плоскости рисунка
Рисунок 3.2
T1 |
= |
1 |
I 0 ω12 , |
|
|||
|
2 |
1 |
|
|
|
|
|
11
где I0 |
- момент инерции стержня относительно оси O , ω1 - |
угловая скорость |
|||
1 |
|
1 |
|
||
вращения. |
|
|
|
|
|
|
I01 |
= |
ml 2 |
. |
|
|
|
|
|||
|
|
3 |
|
|
|
|
Звено AB совершает плоскопараллельное движение. |
Его кинетическая |
|||
энергия |
|
|
|
|
|
|
|
T = |
1 |
m V 2 + |
1 |
I |
ω 2 |
|
|||
|
|
|
|
|
|||||||
|
|
2 |
2 |
2 c2 |
2 |
|
c2 2 , |
|
|||
|
|
|
|
|
|
|
|
||||
где |
m |
- масса стержня |
AB ; Vc |
2 |
- скорость центра масс стержня; |
Ic - |
|||||
|
2 |
|
|
|
|
|
|
|
|
2 |
|
момент инерции стержня относительно оси, проходящей через центр масс стержня
перпендикулярно к плоскости его движения; ω2 - величина мгновенной угловой скорости стержня.
Звено BC 4 совершает вращательное движение относительно оси O2 , перпендикулярной к плоскости рисунка. Кинетическая энергия
|
|
T |
= |
1 |
I |
|
ω 2 |
|
|
|
|
|
|
||||
|
|
3 |
2 |
|
02 |
3 . |
|
|
Момент инерции I02 |
|
относительно оси вращения определим, используя |
||||||
теорему о моментах инерции относительно параллельных осей: |
|
|||||||
I0 |
2 |
= Ic |
+m3 d 2 , |
(3.I) |
||||
|
3 |
|
|
|
|
|
||
где Ic3 - момент инерции стержня относительно оси, проходящей через
центр масс стержня, d - расстояние между параллельными осями. Подставляя в формулу (3.I) исходные данные, получим
I02 |
= |
|
m3 (8l )2 |
|
+ m3l |
2 |
= 19ml |
2 |
|||||
|
|
|
|
|
|
|
. |
||||||
|
12 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Барабан D совершает плоскопараллельное движение. Кинетическую |
|||||||||||||
энергию определяем по формуле |
|
|
|
|
|
|
|
|
|||||
|
T = |
1 |
m V 2 + |
1 |
I |
ω 2 |
|
||||||
|
|
|
|
||||||||||
|
4 |
2 |
|
4 c4 |
|
|
2 |
|
c4 4 . |
||||
|
|
|
Ic = |
|
m R2 |
|
|
|
|
|
|
||
|
|
|
|
4 |
|
|
. |
|
|
|
|||
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
4 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Определим кинематические соотношения, необходимые для определения кинетической энергии тел. Вектор скорости точки А направлен перпендикулярно звену О1 А в направлении его вращения, а модуль скорости
VA = ω1 O1 A = ω1l .
12
Вектор скорости точки В направлен перпендикулярно прямой направлении вращения звена BC4 . Скорость точки C2 определим с помощью
мгновенного центра скоростей P звена AB , который лежит на пересечении
1
перпендикуляров к скоростям в точках A и B . Из треугольника
|
О P = O O tgβ = 5ltgβ . |
||||
|
1 |
1 |
1 |
2 |
|
Расстояние C P из треугольника APC |
2 |
||||
2 |
1 |
|
|
1 |
|
C P = |
AC 2 |
+ AP2 |
− 2 AC AP cosα |
или |
||
2 |
1 |
2 |
1 |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|||||||||||||
C P = |
|
(1,5l)2 + (l + 5ltgβ )2 - 2×1,5l(l + 5ltgβ )cosα |
|||||||||||||||||||||||||||||||||||||||||
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
||||||||||||||||||
= |
|
3,25 +10tgβ + 25tg2β -3cosα(1+ tgβ ) |
|||||||||||||||||||||||||||||||||||||||||
Угловая скорость звена АВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
ω = |
VA |
|
|
= |
|
|
|
|
ω1l |
|
|
|
= |
|
|
|
ω1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
l + 5ltgβ |
|
|
1+ 5tgβ . |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
AP |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость центра масс стержня АВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
= ω c P = |
|
|
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||||||||||||||
V |
|
|
|
|
|
|
|
3,25+10tgβ + 25tg2β − 3cos(1+ tgβ ) |
|||||||||||||||||||||||||||||||||||
|
+ 5tgβ |
|
|||||||||||||||||||||||||||||||||||||||||
c2 |
2 |
2 1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Из треугольника О PO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
1 |
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
PO = |
|
O1O2 |
|
= |
|
5l |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
cos β |
cos β , |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
P B = PO − BO = |
|
|
|
5l |
− 3l |
. |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
а |
|
|
|
|
|
|
cos β |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Скорость точки В |
|
|
|
|
|
|
ω1 |
|
|
|
|
|
l(5−3cosβ) |
= ω1l(5−3cosβ) . |
|||||||||||||||||||||||||||||
|
|
V =ω PB = |
|
|
|
|
|
|
× |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
B |
|
|
2 1 |
|
|
1+5tgβ |
|
|
|
|
|
cosβ |
|
|
|
(1+5tgβ)cosβ |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Угловая скорость звена BC4 |
|
|
|
|
ω1 (5 − 3cos β ) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
ω3 = |
|
VB |
|
= |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
BO |
|
|
|
3(1 + tgβ )cos β . |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда скорость центра масс тела D будет равна |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
VC4 |
|
= ω3O2C4 |
= |
|
5ω1l(5 − 3cos β ) |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
, |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
3(1 + 5tgβ )cos β |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
ω = |
|
|
Vc |
|
= |
|
|
|
5ωl(5−3cosβ) |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
4 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3(1+5tgβ)cosβR . |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
4 |
|
|
|
|
C P |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинетическая энергия стержня O1 A определяется как
13

|
|
|
|
|
T1 = |
1 |
|
ml 2 |
ω1 |
= |
1 |
ml 2ω12 . |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
2 |
|
|
3 |
|
6 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Кинетическая энергия стержня АВ |
|
|
|
|
|
|
|
|
|||||||||||
|
|
lω |
|
|
2 |
|
|
|
(3l)2ω2 |
|
mω2l2 |
|
||||||||||
|
1 |
3,25+10tgβ + 25tg2β −3cos(1+ tgβ) |
1 m |
|
|
|||||||||||||||||
T = |
|
|
m2 |
1 |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
2 |
1 |
= |
1 |
× |
2 |
|
1+ 5tgβ |
|
|
|
|
|
|
2121( |
+ 5tgβ)2 |
(1+ 5tgβ)2 |
|||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
2 + 0,75 |
|
|
|
|
||||
3,25+10tgβ + 25tg2β −3cosα(1+ tgβ) |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинетическая энергия стрежня BC4 |
|
|
|
|
|
|
|||||
|
T3 = |
1 |
2 |
ω1(5−3cosβ) |
2 |
= |
19ml2ω12 (5−3cosβ )2 |
|||||
|
|
19ml |
|
|
|
|
|
|
|
|||
|
2 |
|
181( |
2 |
β . |
|||||||
|
|
|
3(1+5tgβ )cosβ |
|
+5tgβ) cos2 |
|||||||
|
|
|
|
|
Кинетическая энергия барабана D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
5ω1l(5 -3cosβ ) 2 |
|
1 m4R2 |
|
5ω1l(5 -3cosβ ) |
|
2 |
|
||||||||||||||||||||||||
|
|
|
|
|
T4 = |
|
|
|
|
m4 |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
3(1+5tgβ )cosβ |
|
|
3(1_ tgβ × |
5)Rcosβ |
|
||||||||||||||||||||||||||||
|
|
|
|
= |
25mω l2 (5 -3cosβ )2 |
(1+0,5R2 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6(1+5tgβ )2 cos2 β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
1 2 |
|
|
|
|
|
|
|
2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
2 |
|
|
|
|
mω l |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||||
T = |
|
mlω + |
|
|
|
|
1 |
|
|
|
|
|
|
3,25+10tgβ +25tg β -3cosα(1+tgβ) |
+0,75 + |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
( |
|
|
|
|
β) |
|
|
|
|
||||||||||||||||||||||||||||||||||
2 |
|
6 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
1+5tg |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25mω12l2(5-3cosβ)2(1+0,5R2) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
+ |
19ml2ω12(5-3cosβ)2 |
+ |
|
= |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
181( +5tgβ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
cos β |
|
|
|
(1+5tgβ)cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
2 2 1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
(5-3cosβ)2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
1 |
|
|
|
+ |
|
|
|
|
|
|
|
|
|
3,25+10tgβ +25tg β -3cosα(1+tgβ) |
|
|
|
|
+ |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||||||||||||||||||||||||
mlω |
|
|
|
1+5tgβ |
|
|
|
|
+0,75 |
cos β |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПРИМЕР 3.3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
К оси |
|
|
|
катка А массы m |
и радиуса |
|
R привязан конец нерастяжимой нити, |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
переброшенной через блок В массы m2 |
и навернутой на катушку C радиуса R3 . |
|||||||||||||||||||||||||||||||||||||||||||
Ось катушки связана с телом |
D нерастяжимой |
нитью. |
|
Каток |
катится без |
|||||||||||||||||||||||||||||||||||||||
проскальзывания |
вниз по наклонной плоскости, |
расположенной под углом α к |
||||||||||||||||||||||||||||||||||||||||||
горизонту и |
|
посредством нити |
приводит |
|
|
в движение |
катушку C массы |
m3 , |
||||||||||||||||||||||||||||||||||||
которая катится без проскальзывания вверх по наклонной плоскости. Угол
наклона плоскости к горизонту β , |
малый радиус катушки |
r3 . Тело |
D массы |
m4 движется вверх по наклонной |
плоскости. Радиус |
инерции |
катушки |
14
относительно оси, проходящей через центр масс перпендикулярно к плоскости
движения , равен i 3 z . Блок считать сплошным цилиндром. Массой нити
пренебречь.
Определить скорость груза А в момент, когда он переместится на величину
S1 . В начальный момент времени система находилась в покое. Коэффициент
трения качения цилиндра А о наклонную плоскость - δ1 ; катушки |
C - δ2 . |
Коэффициент трения скольжения груза D о наклонную плоскость равен |
f . Каток |
Аи блок Всчитать сплошными однородными цилиндрами (рисунок 3.3). |
|
РЕШЕНИЕ
Рисунок 3.3.
В состав системы входят твердые тела: каток А, блок В , катушка С и груз D , а нити при движении вытянуты. Поэтому сумма работ внутренних сил равна нулю и можно применить теорему об изменении кинетической энергии неизменной механической системы:
T2 − T1 = ∑ AiE . |
(3.2) |
15
Вычислим кинетическую энергию механической системы. В начальный момент времени система находилась в покое, поэтому Т1 = 0 .
T2 = T A + T B + TC + T D |
(3.3) |
Каток А совершает плоскопараллельное движение, поэтому |
|
T = |
1 |
m V 2 |
+ |
1 |
I |
ω 2 |
|
|
|||||
A |
2 |
1 1 |
2 |
|
zc 1 , |
|
|
|
|
|
|||
где V1 - скорость центра масс катка А.
При качении катка без проскальзывания мгновенный центр скоростей PA расположен в точке качания катка с наклонной плоскостью. Для определения
угловой скорости ω1 катка А рассматриваем V1 как скорость центра масс при |
||
мгновенном вращении катушки вокруг оси, проходящей через точку PA , поэтому |
||
V1 = ω 1 R1 , откуда |
|
|
ω 1 = |
V1 |
|
|
. |
|
|
||
|
R1 |
|
|
|
= |
|
m R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Учитывая, что Izc |
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
|
|
|
, найдем |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
T |
|
= |
1 |
m V |
2 |
+ |
1 |
|
m 1 R12 |
× |
V1 2 |
= |
3 |
V |
2 m |
|
. |
|||||||||||
A |
|
1 |
|
|
|
|
|
|
1 |
|||||||||||||||||||
|
|
2 |
|
1 |
|
|
|
|
|
|
|
2 |
|
|
2 |
|
R12 |
|
4 |
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Кинетическая энергия блока |
B , вращающегося вокруг неподвижной оси |
|||||||||||||||||||||||||||
z , вычисляется по формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
T B |
= |
1 |
I z ω 2 . |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
I z |
= |
1 |
|
|
m |
2 R 22 |
, |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где R 22 - радиус блока. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
T B = |
1 |
m |
2 R 22ω 22 . |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
R2ω2 = V1 . |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
T = |
1 |
m V 2 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
B |
|
|
|
4 |
|
|
2 |
1 . |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Кинетическая энергия катушки C , совершающей плоскопараллельное движение, вычисляется по формуле
16
T = 1mV2 + 1I ω2
C 2 3 C 2 zc 3
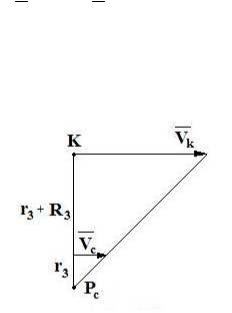
(3.4) При качении катушки без скольжения мгновенный центр скоростей Рс расположен в точке касания катушки с наклонной плоскостью. Из подобия треугольников (рисунок 3.4) имеем
|
|
|
|
|
|
|
|
Рисунок 3.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
Vk = R3 + r3 |
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vc |
|
r3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Отметим, что модули скоростей нити с катушкой |
C и катка A равны |
||||||||||||||||||||||||||||
между собой, т.е. Vk = V1 , то из пропорции найдем |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
Vc = |
|
|
V1r3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
(3.5) |
||||||||||
|
|
|
|
|
|
|
|
R +r |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для определения угловой скорости C ω3 |
рассмотрим скорость точки K |
||||||||||||||||||||||||||||
при мгновенном вращении катушки вокруг точки Pc . Так как |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
V =V =ωkP=ω(R +r ) |
, |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
k |
1 |
|
3 |
|
|
|
3 |
|
|
3 |
3 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
ω3 |
= |
|
|
|
|
V1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
R |
3 |
+ r |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
и ω3 |
|
|
|
|
|||||||
|
|
Подставив в формулу (3.4) выражение для Vc |
|
и учитывая, что |
|||||||||||||||||||||||||||
I |
zx |
= m i 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 3z , найдем кинетическую энергию катушки C . |
mV2(r2 |
+i2 ) |
||||||||||||||||||||||||||||
|
|
|
1 |
|
2 2 |
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|||||||||||
|
|
T = |
|
V r |
+ |
mi2 |
V |
|
= |
|
3 1 |
3 |
|
3 |
|
||||||||||||||||
|
|
|
|
m |
1 3 |
|
1 |
|
|
|
|
|
|
|
Z |
|
|||||||||||||||
|
|
2 |
(R3 +r3) |
2 |
(R3 +r3) |
2 |
|
(R3 |
+r3) |
|
|
||||||||||||||||||||
|
|
c |
3 |
|
|
3 3Z |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 . |
||||||||||
|
|
Кинетическая энергия груза D , |
совершающего поступательное движение, |
||||||||||||||||||||||||||||
вычисляется по формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Т |
|
= |
1 |
m V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
4 4 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
17
Скорость центра масс груза D равна скорости центра масс катушки С , так как их центры масс связаны нерастяжимой нитью. Следовательно,
V4 = VC |
= |
V1r3 |
|
||
R |
+ r . |
||||
|
|
||||
|
|
3 |
3 |
|
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
V |
2 r 2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
TD = |
|
|
m4 |
|
|
|
1 |
3 |
. |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
2 |
(R + r )2 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
Подставив значения кинетических энергий тел, входящих в систему, в |
|||||||||||||||||||||||||||||||
формулу (3.2) найдем кинетическую энергию системы T2 |
в конечный момент |
||||||||||||||||||||||||||||||
времени |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
2 |
|
|
|
|
|
|
|
V12r32 |
|
T = |
3 |
mV 2 |
+ |
1 |
m V 2 |
+ |
1 |
m |
V1 (r3 |
+ i3Z ) |
+ |
1 |
m |
|
= |
||||||||||||||||
|
|
|
|
|
|
(R3 + r3 )2 |
|
|
(R3 + r3 )2 |
||||||||||||||||||||||
2 |
|
4 |
|
1 1 |
4 |
2 1 |
2 3 |
|
|
|
2 4 |
|
|||||||||||||||||||
V 2 |
|
|
|
|
2m3 (r32 + i32 ) |
|
|
2m r2 |
|
|
|
|
. |
||||||||||||||||||
= |
1 |
|
3m + m + |
|
|
|
|
|
|
Z |
|
+ |
|
|
4 3 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
4 |
|
|
1 |
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
(R3 + r3 ) |
|
|
|
|
|
(R3 + r3 ) |
|
|
|
|
|||||||||||||||
Для вычисления работы сил изобразим рисунок 3.3. Внешние |
силы, |
R |
R |
действующие на тела механической системы: G1 - сила тяжести катка A ; |
N1 - |
нормальная реакция наклонной плоскости, смещенная δ1 в направлении движения
R |
|
|
|
|
|
|
|
R |
тела; Fтр - сила терния при качении катка |
по наклонной плоскости; G2 - сила |
|||||||
1 |
R |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
||
тяжести блока B ; |
X 2 - |
горизонтальная составляющая реакции оси блока; Y2 - |
||||||
|
|
|
|
|
|
R |
|
|
вертикальная составляющая реакции оси на блоке; G3 - сила тяжести катушки; |
||||||||
R |
|
|
|
R |
|
|
|
|
Fтр - сила тяжести катушки; |
N3 - |
нормальная реакция |
горизонтальной |
|||||
3 |
|
|
|
|
|
|
|
R |
|
|
сторону движения катушки на величину δ |
||||||
плоскости, смещенная в |
2 ; G4 - сила |
|||||||
|
R |
|
|
|
|
|
|
R |
тяжести груза D ; |
N4 - |
нормальная реакция наклонной плоскости; |
Fтр - сила |
|||||
|
|
|
|
|
|
|
|
4 |
трения скольжения. |
|
|
|
|
|
|
|
|
Определим |
сумму работ |
внешних |
сил, приложенных |
к |
системе, на |
|||
|
|
|
|
|
|
R |
|
|
заданном перемещении. Работа сил тяжести G1 |
|
|
||||||
|
|
R |
|
|
|
|
|
|
|
|
A(G1 ) = G1h = m1 gS1 sin α . |
|
|
||||
|
|
|
R |
|
|
|
|
|
Работа нормальной |
реакции |
N1 |
на |
заданном перемещении |
равна нулю, |
|||
перпендикулярные направлению перемещения, работу на этом перемещении не
создают.
R
A(N1 ) = 0 .
18

Так как сила трения приложена в мгновенном центре скоростей, то ее работа при качении катка по наклонной плоскости
|
|
A(Fтр ) = 0 . |
|
|
|
|
|
1 |
|
Работа пары сил сопротивления качению катка A |
|
|||
|
|
A(M C |
) = −M C ϕ1 , |
(3.6) |
|
|
1 |
1 |
|
где |
M C |
= δ1 N1 = δ1G1 cosα - момент пары сил сопротивления качению катка |
||
|
1 |
|
|
|
A , ϕ1 - угол поворота катка.
Так как каток A катится без проскальзывания, то угол его поворота
ϕ1 = S1 ,
R1
где S1 - перемещение центра C1 катка A .
Работа пары сил сопротивления качению на основании формулы (3.6)
R |
|
) = −δ m g |
S1 |
cosα |
|
|
A(M |
C1 |
. |
|
|||
|
|
|||||
|
1 1 |
R1 |
|
|||
|
|
|
R |
R |
||
Сила тяжести блока B и две составляющие реакции X 2 |
и Y2 приложены в |
|||||
неподвижной точке, следовательно, |
|
|
|
|
|
|
R |
|
R |
|
R |
|
|
A(G1 ) |
= A( X 2 ) = A(Y2 ) = 0 . |
|
||||
Для определения работы силы тяжести катушки C найдем перемещение центра масс. Так как скорости центров масс катка A и катушки C связаны соотношением (3.5), то после интегрирования по времени при нулевых начальных условиях, получим
|
|
SC3 = |
S1r3 |
|
. |
|
|
|
|
|
R + r |
|
|
|
|||
|
R |
|
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Работа силы тяжести G3 |
|
|
|
|
|
|
|
|
|
|
R |
|
|
S1r3 |
|
|
|
|
A(G3 ) = −G3h = −m3 g |
|
sin |
β . |
||||
|
R3 |
+ r3 |
||||||
|
|
|
|
|
|
|||
Работа нормальной реакции поверхности на перемещение SC |
3 |
|||||||
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
A(N1 ) = 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Работа силы трения |
Fтр |
при качении |
катушки |
равна |
нулю, так как сила |
|||
|
3 |
|
|
|
|
|
|
|
приложена в мгновенном центре скоростей Pc . Работа пары сил сопротивления
качению катушки C
R
A(M C3 ) = −M C3ϕ3 ,
19
где |
M C |
= δ 2 N3 = δ |
2G3 cos β - момент |
|
пары сил сопротивления качению |
|
|
|
3 |
|
|
|
|
катушки C , ϕ3 - угол поворота катушки C . Так как катушка катится без |
||||||
скольжения, то угол ее поворота |
|
|
|
|||
|
|
|
ϕ3 = |
SC |
, |
|
|
|
|
|
|
3 |
|
|
|
|
|
r3 |
|
|
где SC3 - перемещение центра масс катушки; r3 - расстояние от центра масс
катушки до мгновенного центра скоростей. Работа пары сил сопротивления качению по формуле (3.7)
R |
) = −δ 2 m3 g |
|
S1 |
cos β . |
|
A(M C3 |
|
||||
R3 |
+ r3 |
||||
|
|
|
Работа силы тяжести тела D
R |
S1r3 |
sin β . |
||
A(G4 ) = −G4 h = −m4 g |
||||
R3 |
+ r3 |
|||
|
|
|||
Работа нормальной реакции поверхности N4
R
A(N4 ) = 0 .
R
Работа силы трения скольжения Fтр4
R
A(Fтр4 ) = −Fтр4 S4 .
R
Так как Fтр4 = fN4 = fG4 cos β , то
R |
) = − fm4 g |
S1r3 |
cos β . |
||
A(Fтр4 |
|||||
R3 |
+ r3 |
||||
|
|
|
|||
Сумма работ внешних сил определяется сложением работ отдельных сил:
|
|
∑ AiE = m1 gS1 sin α − δ1m1 g |
S1 |
cosα − m3 g |
|
S1r3 |
|
− |
|
|||||||||||||
|
|
|
R3 + r3 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|||||
|
|
− δ 2 m3 g |
|
S1 |
|
cos β − m4 g |
|
S1r3 |
sin β − fm4 g |
S1r3 |
cos β |
|||||||||||
|
|
R3 |
|
|
|
|
R3 |
+ r3 |
||||||||||||||
|
|
|
+ r3 |
|
|
|
R3 + r3 |
|
|
|
|
|
||||||||||
Согласно уравнению (3.2) приравниваем выражения для |
T2 и ∑ AiE : |
|||||||||||||||||||||
V 2 |
|
|
|
2m3 (r33 + i32 ) |
|
|
|
2m r 2 |
|
|
|
|
|
|
|
|||||||
|
1 |
3m1 + m2 |
+ |
|
|
|
Z |
|
+ |
4 3 |
|
= |
|
|
|
|
|
|||||
4 |
|
|
(R3 + r3 )2 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
(R3 + r3 )2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
m3 (r3 |
+ δ 2 |
cos β ) |
|
m4 r3 |
(sin β + f cos β ) |
|||
= gS1 m1 |
sin α − δ1 cosα |
|
|
− |
|
|
|
|
− |
|
|
|
|
|
R3 + r3 |
|
R3 + r3 |
||||||||
|
|
R |
|
|
|
|
|
|||||
20