

1, 2, 3, 4 – Типы обрабатываемых деталей
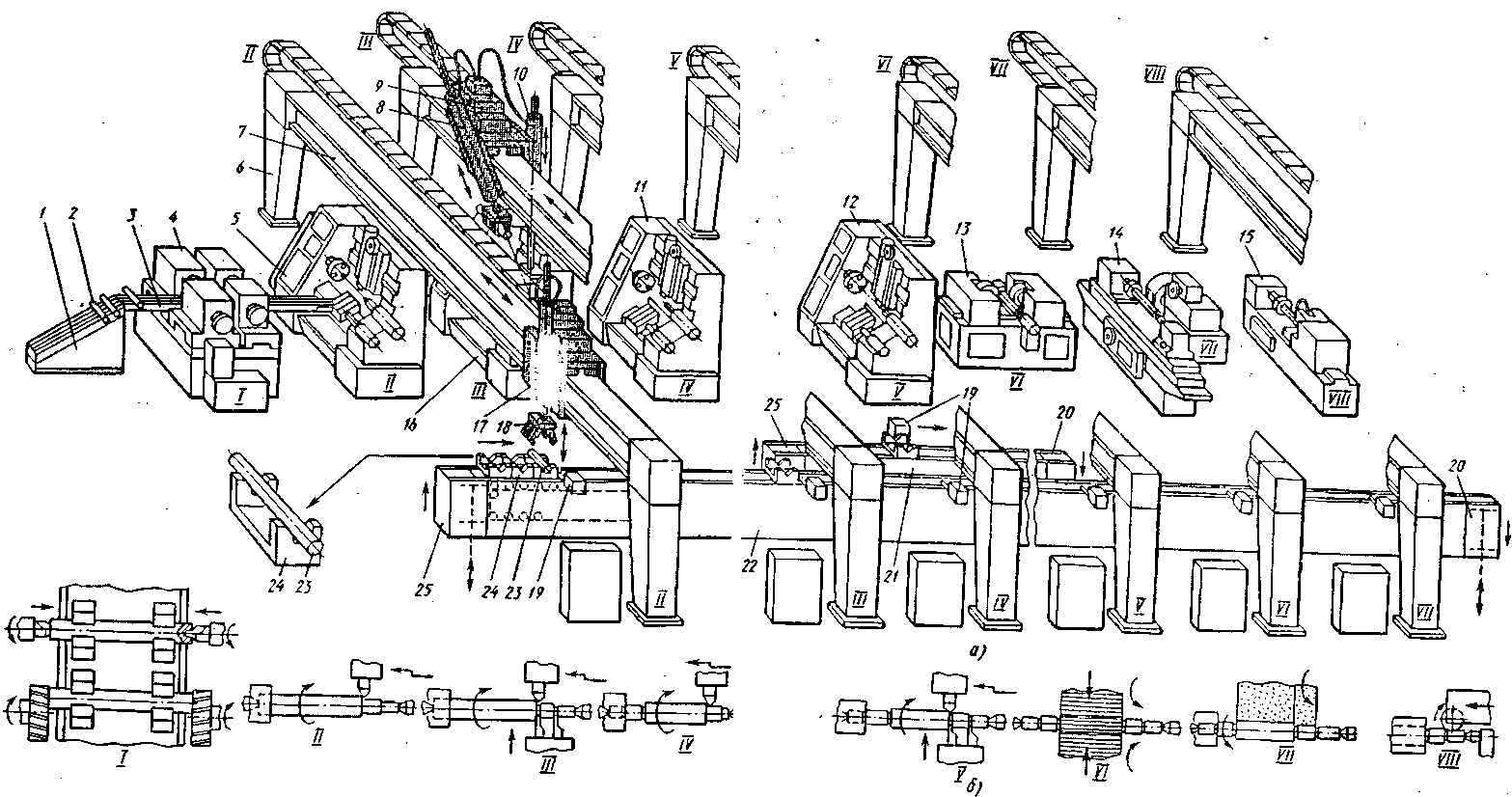
Рис. 3. Автоматическая линия для обработки валов
3. Третий этап автоматизации

Рис. 1. Функциональные подсистемы ГПС

Рис. 2. Взаимодействие подсистем ГПС
(стрелками показаны прямые и обратные связи)

Рис. 3. Факторы, влияющие на возникновение и развитие ГПС

Рис. 4. Функциональное размещение рабочих мест для случая ячеистой структуры ПС

Рис. 5. Модульное размещение рабочих мест для случая ячеистой структуры ПС

Рис. 6. Сотовое размещение рабочих мест для случая ячеистой структуры ПС

Рис. 7. Размещение рабочих мест в соответствии с этапами технологического процесса

Рис. 8. Однорядная линейная ПС с позициями закрепления и открепления изделий

Рис. 9. Линейно-замкнутая ПС с центральной позицией закрепления-открепления изделий

Рис. 10. Сегментная ПС с промежуточными накопителями

Рис. 11. Размещение станков со свободным подходом к РМ
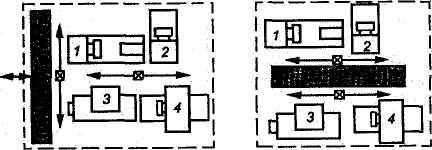
Рис. 12. ПС с неподвижным накопителем изделий:
а — внешним; б — внутренним

Рис. 13. ПС с подвижным накопителем изделий:
а — внешним; б — внутренним

Рис. 14. Классификация многоцелевых станков

Рис. 15. Носители изделий в ГПС

Рис. 16. Структура транспортных подсистем ГПС

Рис. 17. Средства транспортирования изделий в ГПС


Рис. 18. Одиночные палеты для складирования деталей:
а — обрабатываемых с закреплением в центрах;
б — обрабатываемых с закреплением в патроне
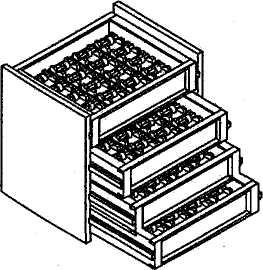
Рис. 19. Выдвижные палеты

Рис. 20. Многоярусные палеты

Рис. 21. Схема ленточного транспортера:
1 — передний барабан; 2 — лента; 3 — поддерживающие ролики;
4 — несущая конструкция; 5 — привод

Рис. 22. Разновидности цепных транспортеров:
а — барабанный с центрирующими оправками; б — элеваторный

Рис. 23. Схема цепного транспортера для контейнеров:
1 — участки конвейера; 2 — цепи; 3 — привод

Рис. 24. Роликовый транспортер с приводом


Рис. 25. Подвесной однорельсовый транспортер:
1 — крючья; 2 — рельс; 3 — цепь; 4 — короб

Рис. 26. Рельсовая тележка:
1 — механизм загрузки-выгрузки палет; 2 — деталь; 3 — налета;
4 — буфер безопасности; 5 — рельсовый путь

Рис. 27. Способы управления движением робокаров

Рис. 28. Функциональные записи на пути движения
робокара в двоичной системе счисления:
а — пункт остановки; б — код управляющей функции; в — код положения

Рис. 29. Напольный колесный кран-штабелер:
1 — стойка; 2 - кабина; 3 - транспортируемый груз; 4 — привод

Рис. 30. Подвесной штабелер налет фирмы «Techmatrans»:
1 — рельс; 2 — полки склада; 3 — стойка; 4 — кабина оператора; 5 — привод

Рис. 31. Классификация магазинов и подсистем складирования ГПС

Рис. 32. Производственные системы с центральным складом

Рис. 33. Схема склада-стеллажа высокого складирования:
1 — штабели склада; 2 — кран-штабелер; 3 — роликовые транспортеры; 4 — палеты

Рис. 34. Схемы складов-стеллажей с постоянными (а) и изменяемыми (б) гнездами, обслуживаемых колесными кранами-штабелерами

Рис. 35. Схема токарной производственной ячейки, обслуживаемой портальным промышленным роботом:
1 — компьютер; 2 — емкость для технического брака; 3, 6 — токарные станки с ЧПУ; 4 — промышленный робот; 5 — буферный накопитель;
7 — измерительная система; 8 — комплект станочных палет

Рис. 36. Схема использования циклического подающего устройства:
1 — детали на налете, уложенные рядами; 2 — налета; 3 — тележка с механической рукой; 4 — портальный робот, перемещающийся по одной оси; 5 — токарный станок

Рис. 37. Подвижные магазины палет, используемые в ГПМ
для обработки корпусов

Рис. 38. Неподвижные магазины палет, используемые в ГПМ для обработки корпусов:
а — круговой; б — линейный; 1 — налета; 2 — поворотное устройство
для смены палет; 3 — тележка с устройством для смены паллет



Рис. 39. Основные типы манипуляционных устройств,
используемые в ГПМ:
а — робот-манипулятор, установленный на станке; б — универсальный отдельно стоящий робот; в — портальный одноосный манипулятор;
г — портальный двухосный манипулятор