

Лабораторная 5-3 (ИЗ-1)1
.docxУтверждаю Заведующий кафедрой ОНИП канд. техн. наук, доцент
__________ Антонишин Ю.Т.
«__» ______ 2013
Основы научных исследований и моделирование
М5. Контрольное задание № 1
Моделирование движения машинотракторного агрегата
Составители:
М.М. Дечко, доцент кафедры «Основы научных исследований и проектирования» Учреждения образования «Белорусский государственный аграрный технический университет», кандидат технических наук
Лабораторная работа № 3
Моделирование движения машинотракторного агрегата
Краткие теоретические сведения.
Важнейшей задачей каждого хозяйства является повышение конкурентоспособности и рентабельности производимой продукции. Одним из перспективных решений данной проблемы является максимальное использование возможностей каждого машинотракторного агрегата (МТА) путём расчёта действительных значений его эксплуатационно-технологических показателей и выбора оптимального режима работы, обеспечивающего экономию горюче-смазочных материалов и повышение производительности. Возможности современных информационных технологий позволяют выполнить теоретический анализ влияния факторов процесса эксплуатации на показатели эффективности использования МТА в конкретных полевых условиях. В данной работе мы будем изучать влияние кинематических параметров МТА и траектории его движения на ширину разворотной полосы при обработке полей. Разворотная полоса является непроизводительным использованием МТА, поэтому её уменьшение – один из способов повышения эффективности использования МТА.
Математическая модель траектории разворота МТА может быть построена на основе тригонометрических уравнений, описывающих взаимосвязь геометрических факторов МТА с параметрами траектории разворота.
Исследования технической системы с помощью математической модели может проводиться:
-
аналитически;
-
численно;
-
графически.
Цель лабораторной работы ‑ создать в программе Mathcad математическую модель и выполнить анализ ширины разворотной полосы МТА в зависимости от его кинематических факторов и траектории разворота.
Рисунок 1.
Геометрическая схема разворота МТА.
Рисунок 2.
Траектории разворота МТА полукругом
и восьмёркой

Построение математической модели. Движение МТА при развороте по круговой траектории схематично представим, как показано на схеме (Рисунок 1).
Полоса
разворота, ширина которой обозначенная
на схеме E,
характеризует холостой ход МТА. Величина
этого параметра определяется
геометрическими факторами МТА и
траекторией разворота. В качестве
основных геометрических факторов МТА
выберем:
L – кинематическая длина агрегата, м;
B ‑ ширина агрегата, м;
r – радиус разворота агрегата, м.
Рисунок 3. Углы
атаки МТА к кромке поля. .
.
Таким образом, математическая модель будет представлять собой уравнения зависимости одного параметра E от 4-х факторов L, B, r, g для 2-х форм траектории разворота. Расчетные формулы для параметра E приведены в в таблице 1.
Общая ширина 2-х полос разворота на противоположных сторонах поля будет составлять:
 ,
,
где
вид функций
 и
и
 определяется формой траектории разворота
(см. таблицу 1).
определяется формой траектории разворота
(см. таблицу 1).
Реализация метода решения ММ на компьютере. Для исследования моделируемой технической системы реализуем её математическую модель в программе Mathcad. Для примера используем численные значения факторов из варианта № 30 (см. таблицу 2).
Пример решения задачи (вариант 30).
Формулировка задачи. Создать в программе Mathcad математическую модель и выполнить анализ зависимости полосы разворота МТА от угла атаки к кромке поля и траектории разворота. Определить зону предпочтительных значений угла атаки для уменьшения суммарной ширины разворотной полосы. Исходные данные для расчета приведены в таблице 2.
План решения задачи.
-
Внимательно прочитать условия задачи. Понять, что является объектом моделирования
-
Установить границы моделируемой системы.
-
Установить, какие параметры системы оцениваются.
-
Выбрать переменные (факторы), влияющие на оцениваемые параметры.
-
Составить уравнения взаимосвязи факторов и параметров системы.
-
Создать математическую модель в программе MathCAD.
-
Выполнить расчет для исходных данных, заданных в таблице 2, построить графики зависимости ширины полосы разворота от угла атаки для каждой траектории.
-
Выполнить с помощью построенных графиков анализ полученного решения.
-
Оформить отчет о результатах исследования.
-
Объектом моделирования является процесс движения МТА при обработке поля.
-
В моделируемой системе ограничимся рассмотрением геометрических параметров МТА, двумя формами траектории разворота (полукругом и восьмеркой).
-
Оценивается суммарная ширина полос разворота МТА на противоположных сторонах обрабатываемого поля (E, м).
-
Факторы, влияющие на оцениваемый параметр:
L – кинематическая длина агрегата, м;
B ‑ ширина агрегата, м;
r – радиус разворота агрегата, м;
g – угол атаки к кромке поля, градусы;
– угол между противоположными сторонами поля, градусы;
– форма траектории разворота (полукругом и восьмеркой).
-
Используем уравнения взаимосвязи факторов и параметров системы, приведенные в таблице 1. (Обратите внимание, что для расчета ширины разворотных полос МТА введены еще два вспомогательных параметра ‑ углы , ‑ и формулы их взаимосвязи с углом атаки g).
Таблица 1
Уравнения зависимости ширины полосы разворота МТА от его геометрических факторов и траектории разворота
|
Разворот полукругом |
|
|
|
Разворот восьмёркой |
|
|
|
где
|
|
|
 ,
,
 ,
,
-
Создадим математическую модель в программе Mathcad.
Определим, как функции пользователя, уравнения взаимосвязи факторов и параметров системы:

Зададим значения 4-х постоянных факторов (L, B, r, ) и одного варьируемого фактора (g):

Построим для каждой траектории графики зависимости ширины разворотной полосы от угла атаки:

Построим для каждой траектории графики зависимости суммарной ширины разворотной полосы от углов атаки на двух кромках поля:

На полученных графиках видно, что в диапазоне углов g от 90 до приблизительно 125 достигается минимальная ширина разворотной полосы для обеих траекторий. Отформатируем интервалы осей графиков таким образом, чтобы выделить интересующие нас области:












![]()
Отметим на графиках с помощью маркера рекомендуемые значения угла и полученные интервалы ширины разворотной полосы. Меню для вставки маркеров вызывается двойным щелчком мыши по полю графика:




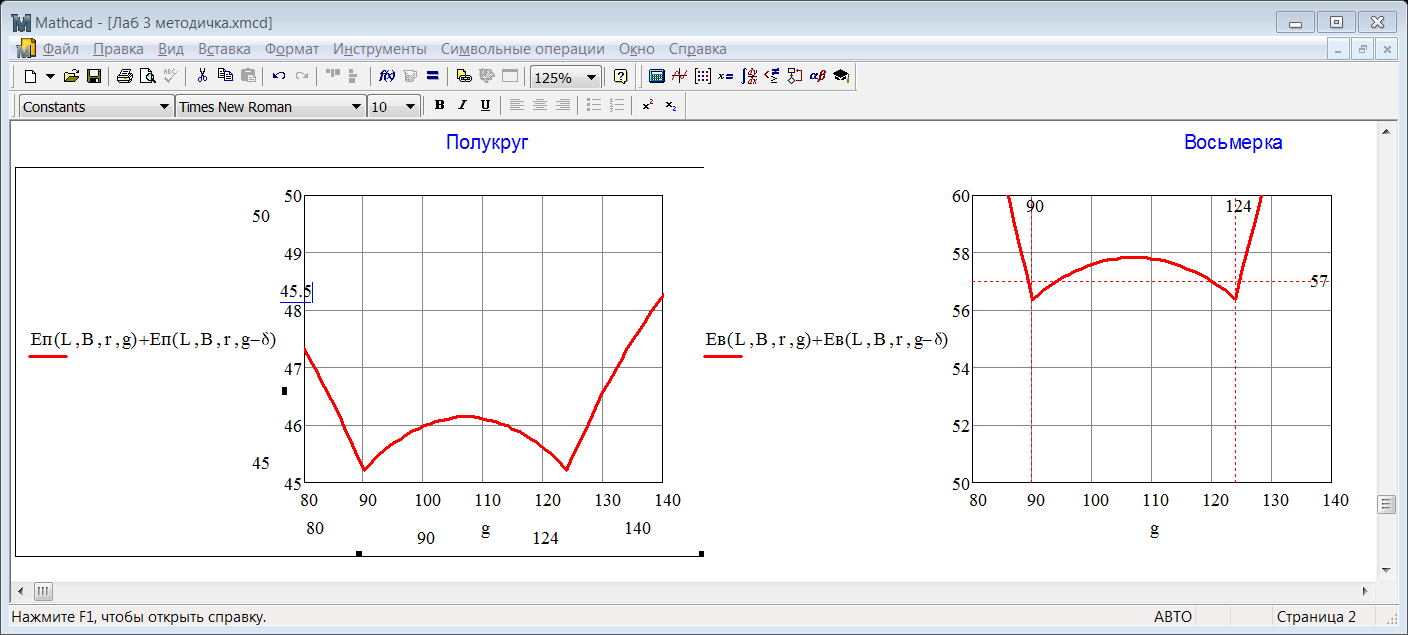

В результате получим наглядное представление рассчитанных значений:

-
Анализ результатов показывает:
Для получения меньшей ширины разворотной полосы необходимо использовать траекторию разворота МТА полукругом. При этом необходимо выбирать угол атаки к кромке поля в диапазоне 90 ‑ 124. При оптимальных углах атаки ширина полосы разворота составит 45,5 м для круговой траектории и 57 м при развороте восьмеркой.
-
Оформление результатов:
Вариант 30
-
Объектом моделирования является процесс движения МТА при обработке поля.
-
В моделируемой системе ограничимся рассмотрением геометрических параметров МТА, двумя формами траектории разворота (полукругом и восьмеркой).
-
Оценивается суммарная ширина полос разворота МТА на противоположных сторонах обрабатываемого поля (E, м).
-
Факторы, влияющие на оцениваемый параметр:
L = 8 – кинематическая длина агрегата, м;
B =5 ‑ ширина агрегата, м;
r =10 – радиус разворота агрегата, м;
= 34 – угол между противоположными сторонами поля, градусы;
-
Варьируемые факторы:
g – угол атаки к кромке поля, градусы;
‑ форма траектории разворота (полукругом и восьмеркой).
-
Уравнения взаимосвязи факторов и параметров системы:



где



Вывод: Для получения меньшей ширины разворотной полосы необходимо использовать траекторию разворота МТА полукругом. При этом необходимо выбирать угол атаки к кромке поля в диапазоне 90 ‑ 124. При оптимальных углах атаки ширина полосы разворота составит 45,5 м для круговой траектории и 57 м при развороте восьмеркой.
Таблица 2. Варианты индивидуальных заданий:
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
|
L, м |
15 |
8 |
13 |
10 |
15 |
12 |
18 |
12 |
18 |
8 |
10 |
11 |
15 |
12 |
11 |
|
B, м |
8 |
7 |
8 |
5 |
7 |
9 |
6 |
9 |
7 |
6 |
4 |
4 |
5 |
5 |
6 |
|
r, м |
14 |
13 |
13 |
11 |
9 |
11 |
13 |
13 |
10 |
10 |
13 |
12 |
8 |
10 |
9 |
|
, град |
-27 |
15 |
-12 |
-17 |
-18 |
-30 |
18 |
15 |
25 |
23 |
13 |
-30 |
-20 |
16 |
-11 |
|
Вариант |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
|
L, м |
9 |
11 |
18 |
17 |
16 |
17 |
9 |
17 |
10 |
14 |
18 |
8 |
15 |
11 |
8 |
|
B, м |
7 |
5 |
6 |
6 |
8 |
8 |
7 |
10 |
8 |
4 |
7 |
7 |
8 |
8 |
5 |
|
r, м |
14 |
10 |
12 |
13 |
9 |
10 |
14 |
14 |
13 |
12 |
13 |
9 |
9 |
11 |
10 |
|
, град |
-17 |
16 |
-18 |
17 |
13 |
-18 |
14 |
-23 |
22 |
-12 |
18 |
-26 |
26 |
14 |
34 |