

U я (α)= |
3 6U max cos(α)= 3 |
6 169,7 |
= 397,1В. |
|
π |
3,14 |
|
Ток возбуждения IB =397,1/245= 1,621 А.
Зависимость между средним значением ЭДС якоря и угловой скоростью можно определить не только по формуле (5.2), но и через ток возбуждения:
Ея = КиIВω.
В этом случае в условии задачи задается значение тока возбуждения и коэффициента Ки.
Из последнего выражения определяем ЭДС якоря:
Ея = 1,2 1,621 188,5 = 366,6 В.
Напряжение на якоре из (5.6)
U я = 50 0,25 + 366,6 = 379,1 В.
Из уравнения (5.15):
U я (α)= 379,1= |
3 6U max cos(α)= 3 |
6 169,7 cos(α). |
|
π |
3,14 |
Угол задержки α = 17,44°.
3.Iя = 10% 50 = 5 А.
Eя = Uя – Iя Rя = 279,1 – 0,25 5 = 277,85 В.
Определяем скорость холостого хода:
ω0 = |
Eя |
= |
|
277,85 |
= 202,04 рад/с = 1929,5 мин-1. |
K T |
1,2 1,146 |
||||
|
и В |
|
|
|
|
3. Определяем диапазон изменения скорости:
D = 1929,5 −1800 =0,072, или 7,2%.
1800
Импульсные системы электропривода
Импульсные преобразователи постоянного напряжения (ИППН) осуществляют преобразование одного постоянного напряжения Uc в другое Uвых (рис. 2.2.1.15). Служат для питания нагрузки постоянным напряжением, отличающимся по значению от напряжения источника.
Основу принципа действия импульсного преобразователя составляет ключевой режим работы регулирующего полупроводникового прибора, посредством которого осуществляется периодическое подключение напряжения источника Uc к выходной цепи преобразователя [4]. Малое падение напряжения на регулирующем приборе в открытом состоянии и малый протекающий ток в закрытом обусловливают высокий КПД преобразователей данного типа.
Рис. 2.2.1.15. Структурная схема импульсного преобразователя
31

Широко применяется ИППН в электроприводе постоянного тока, в котором с помощью преобразователя осуществляется управление частотой вращения ДПТ. Диапазон использования по мощности — от сотен ватт до сотен киловатт.
По характеру решаемых задач все схемы ИППН разделяются на три класса;
1.Понижающие ИППН, для которых Uвых < Uc;
2.Повышающие ИППН, для которых Uвых > Uc;
3.Полярно-инвертирующие ИППН, осуществляющие изменение полярности выходного напряжения относительно общей для входа и выхода точки соединения.
С учетом особенностей решаемых задач при управлении ДПТ применение получили первые два типа, а точнее — две характеризующие их схемы соединения главных цепей: с последовательно соединенным управляемым полупроводниковым ключом (УПК) (рис. 2.2.1.16,а) используется в двигательном режиме ДПТ и параллельно соединенным УПК (рис. 2.2.1.17,а) используется в генераторном режиме ДПТ. Их возможные области регулирования представлены соответственно на рис. 2.2.1.16,б и 2.2.1.17,б.
Рис. 2.2.1.16. Схема с последова- |
Рис. 2.2.1.17. Схема с параллельно |
тельно соединенным УПК (а) и воз- |
соединенным УПК (а) и возможная |
можная область регулирования (б) |
область регулирования (б) |
Схема на рис. 2.2.1.16,а не позволяет изменять полярность выходного напряжения, в связи с чем ее часто называют нереверсивной. При повышенных токах нагрузки схема ИППН выполняется по многотактному принципу, основанному на параллельном подключении к общей нагрузке нескольких преобразователей по рис. 2.2.1.16,а с заданием соответствующей последовательности их работы во времени. Числом параллельных ветвей отличаются соответственно одно-, двух-, трех-, а в общем случае m-тактные ИППН.
Схема на рис. 2.2.1.17,а самостоятельно применяется редко, чаще совместно со схемой рис. 2.2.1.16,а, образуя так называемый нереверсивный двухквадрантный ИППН (рис. 2.2.1.18,а).
Реверсивные ИППН обеспечивают питание ДПТ напряжением как одной, так и другой полярностей. Они выполняются по мостовой схеме соединения УПК и обратных диодов (рис. 2.2.1.19,а).
32

В ней реализуются режимы работы схем рис. 2.2.1.16,а и 2.2.1.17,а при обеих полярностях выходного напряжения. Тем самым схема на рис. 2.2.1.19,а осуществляет работу ДПТ двигателем и генератором при обоих направлениях вращения ротора.
Рис. 2.2.1.18. Схема нереверсивного двухквадрантного импульсного преобразователя (а) и возможная область регулирования (б)
Рис. 2.2.1.19. Схема реверсивного импульсного преобразователя (а) и возможная область регулирования (б)
В режиме прямого пуска УПК1 и УПК2 открыты, а УПКЗ и УПК4 закрыты. В режиме реверса работают УПКЗ и УПК4, а УПК1 и УПК2 закрыты. При рекуперации энергия возвращается в источник диодами либо VD1 и VD2, либо VD3 и VD4. Область регулирования такого четырехквадрантного ИППН показан на рис. 2.2.1.19,б.
Применение реверсивного ИППН обусловливает и соответствующее название системы электропривода — бесконтактный (а часто и быстродействующий) реверсивный электропривод постоянного тока. Реверсивный электропривод может быть реализован и на базе нереверсивного двухквадрантного ИППН (см. рис. 2.2.1.18,а), если использовать контактный реверсор цепи якоря или обмотки возбуждения ДПТ.
Управляемый полупроводниковый ключ рассматриваемых схем преобразователей условно представлен двухоперационным (GТО) тиристором. В
современных разработках преимущественно применяются силовые транзисторы с полевым управлением: полевые МОП-транзисторы и биполярные
33
транзисторы с изолированным затвором (БТИЗ, IGBT). Эти приборы позволяют повысить частоту переключения.
Кроме того, они позволяют уменьшить габариты трансформаторов,
дросселей, конденсаторов. Приборы тиристорного типа (одно- и двухопе-
рационные тиристоры) находят применение чаще в ИППН повышенной мощности и при высоких питающих напряжениях.
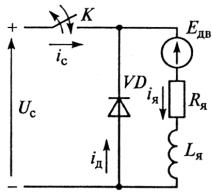
Рассмотрим особенности работы системы при импульсном регулировании с помощью ее эквивалентной схемы замещения (рис. 2.2.1.20). Отметим, t0 характеризует время открытого состояния импульсного преобразователя; tз
— время его закрытого состояния; Т = t0 + tз — период импульсов; γ = t0/T – скважность импульса.
Для рассматриваемой системы справедливы следующие уравнения: для периода замкнутого состояния ключа К (переменные обозначены индексом
1)
uс = сΦномω1 + Rяiя1 + Lя |
|
diя1 |
; |
(2.2.1.17) |
||
|
dt |
|||||
M1 = cΦномiя1 ; |
|
|
|
|||
|
|
|
(2.2.1.18) |
|||
M1 −M c = J |
dω1 |
|
; |
|
(2.2.1.19) |
|
dt |
|
|||||
|
|
|
|
|
||
Рис. 2.2.1.20. Эквивалентная схема системы импульсный преобразователь — ДПТ НВ
для периода разомкнутого состояния ключа (переменные обозначены индексом 2)
0 = сΦномω2 + Rяiя2 + Lя |
|
diя2 |
; |
(2.2.1.20) |
|||
|
dt |
||||||
M 2 |
= cΦномiя2 ; |
|
|
(2.2.1.21) |
|||
|
|
|
|||||
M 2 |
− M c = J |
dω2 |
|
, |
|
(2.2.1.22) |
|
dt |
|
||||||
|
|
|
|
|
|
||
где Мс и J — соответственно момент статической нагрузки на валу двигателя и момент инерции; Фном — номинальный поток двигателя; Rя и Lя — активное и индуктивное сопротивления якорной цепи.
34
Считаем, что источник питания обладает свойствами источника напряжения, т.е. его внутреннее сопротивление пренебрежимо мало, а диод VD обладает идеальными свойствами, его сопротивление равно нулю в проводящем направлении и бесконечности — в обратном.
Для того чтобы найти зависимости между средними значениями тока, момента, скорости, напряжения, надо проинтегрировать приведенные уравнения за период коммутации.
Полагая, что за время T момент Мс = const, из уравнений (2.2.1.19) и (2.2.1.22) можно найти:
|
|
|
|
1 T |
|
|
|
|
|
1 |
t0 |
|
tЗ |
|
|
|
|
|
|
||||||
Mср = |
|
|
∫Mdt |
= |
|
|
|
|
|
|
|
|
|
= |
|
|
|
||||||||
T |
|
T |
|
∫M1dt + ∫M2dt |
|
|
|
||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|||||
|
1 |
t0 |
|
|
|
|
|
|
dω1 |
tЗ |
|
|
|
dω2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
= |
|
|
∫ Mс + J |
|
|
|
|
|
dt + |
∫ M |
с + J |
|
|
dt |
= |
||||||||||
T |
|
|
dt |
|
dt |
||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||||||
= |
1 |
[M |
|
(t |
0 |
+ t |
З |
)+ J (∆ω + ∆ω |
2 |
)]. |
|
|
|
|
|
||||||||||
|
c |
|
|
|
|
|
|||||||||||||||||||
|
T |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для квазиустановившегося режима должно соблюдаться соотношение |
|||||||||||||||||||||||||
∆ω1 = - ∆ω2, т. е. мгновенные значения скорости в начале и конце периода должны быть равны друг другу, так как в противном случае имеет место переходный процесс, а не квазиустановившийся режим. Учитывая также, что t0 + t3 = T1, из предыдущего выражения можно найти:
Mср = Mс.
Отсюда в соответствии с (2.2.1.18) и (2.2.1.21) |
(2.2.1.23) |
||||
Iср = cΦном |
= cΦном |
= Iс |
|||
|
M ср |
|
M с |
|
|
С другой стороны, из (2.2.1.17) и (2.2.1.20)
|
R |
я |
t0 |
tЗ |
|
|
|
RяIср = |
|
|
|
|
|
= |
|
T |
|
∫iя1dt + ∫iя2dt |
|||||
|
|
0 |
0 |
|
|
||
|
|
|
Rя |
t0 |
|
|
|
|
diя1 |
|
tЗ |
|
|
diя2 |
|
|
|
||
|
= |
|
|
∫ Uc |
− cΦномω1 |
− Lя |
|
dt + ∫ |
− cΦномω2 |
− Lя |
|
dt |
= |
||||||
|
T |
dt |
dt |
||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
Rя |
[Uct0 − cΦномωср − Lя (∆iя1 + ∆iя2 )], |
|
|
|
|
|
|
||||||||||
|
T |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
1 t0 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
T |
|
|
|
tЗ |
|
|
|
|
|
|
|
|
|
||||
где ωср = |
|
∫ωdt = |
|
|
∫ω1dt + ∫ω2dt . |
|
|
|
|
|
|
|
|
|
|||||
T |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
0 |
|
|
|
T |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
||
Учитывая, что в квазиустановившемся режиме ∆iя1 = -∆iя2, и что t0/Т= γ, находим
RяIср = γUc −cΦномωср .
35

Отсюда уравнение скоростной характеристики рассматриваемой системы импульсного регулирования имеет вид
ωср = |
γ Uc − RяIср |
. |
(2.2.1.24) |
|
|||
|
сΦном |
|
|
Подставляя в это выражение (2.2.1.23), получим уравнение механической характеристики:
ωср = |
γUc |
− |
Rя |
|
M . |
(2.2.1.25) |
|
|
2 |
||||
|
сΦном |
(сΦном ) |
|
|||
Полученные уравнения скоростных и механических характеристик идентичны уравнениям таких же характеристик для других систем управляемый преобразователь—двигатель. Механические и скоростные характеристики представляют собой параллельные прямые, отсекающие на оси ординат отрезки:
γU
ω0 = cΦномc =γω0 .
При допущении, что сопротивление диода равно нулю, жесткость механических характеристик для рассматриваемой системы равна жесткости естественной механической характеристики, определяемой зависимостью:
β = −(cΦном )2 .
Rя
Выражения (2.2.1.24) и (2.2.1.25) справедливы только в том случае, когда в цепи якоря проходит непрерывный ток. Если же в период отключенного состояния ключа ток iя успевает снизиться до нуля и в кривой тока содержится пауза, то имеет место режим прерывистого тока. В этом случае движение системы во время паузы тока связано с большим расходом запаса кинетической энергии, чем в режиме непрерывного тока, и соотношение между ωср и Iср изменяется по сравнению с режимом непрерывного тока.
Для анализа характеристик систем с импульсным регулированием напряжения в зоне прерывистого тока необходимо найти граничное значение начально-непрерывного тока и соотношение между Iср и ωср в этой зоне. С этой целью следует определить закон изменения во времени мгновенного значения тока якоря.
Из уравнений (2.2.1.17)...(2.2.1.22) следует, что на каждом из интервалов замкнутого и разомкнутого состояний ключа поведение системы описывается дифференциальными уравнениями второго порядка. Однако для практических расчетов, учитывая реальное соотношение параметров системы, с достаточной точностью можно считать, что за период коммутации скорость электропривода остается неизменной, т.е. ω1 = ω2 = ωср и
ddtω1 = ddtω2 = 0 .
36

В этом случае характер изменения тока якоря за период коммутации определяется уравнениями (2.2.1.17) и (2.2.1.20), которые при принятом допущении являются линейными дифференциальными уравнениями первого
порядка. Их решение имеет следующий вид: |
|
|
||||||||||||||
|
|
|
i я1= I1 −(I1 − Iнач1 )e−t Tя ; |
|
||||||||||||
|
|
|
i я2 = I2 −(I2 − Iнач2 )e−t Tя ; |
|
||||||||||||
|
|
|
I2 = − |
|
cΦномωср |
; |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
Uc −cΦномωср |
|
Rя |
|
|
|
|
|
|
|
|||||
I1 |
= |
= |
U |
c |
|
+ I2 |
= Iк + I2 |
; |
||||||||
|
Rя |
|
|
|
|
|||||||||||
|
|
|
|
|
Rя |
|
|
|||||||||
|
|
|
Tя = |
Lя |
; |
Iк = |
Uс |
, |
|
|
||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Rя |
|
|
|
|
|
Rя |
|
|
||||
где Iнач1, Iнач2 — токи якоря в начале первого и второго интервалов работы ключа К.
Граничный ток определяется следующей зависимостью: |
|
|
Iгр = Iк |
γ(1−γ ). |
(2.2.1.26) |
|
2Tя fк |
|
Из последнего выражения следует, что граничный ток изменяется при
регулировании скорости. Наибольшего значения граничный ток достигает при γ = 1/2:
Iгрmax = Iк (8Tя fк ), |
(2.2.1.27) |
а при γ = 1 и γ = 0 Iгр = 0. Это объясняется тем, что в первом случае якорь двигателя все время подключен к сети, а во втором имеет место режим динамического торможения при отсутствии дополнительного сопротивления в цепи якоря.
Скоростные (механические) характеристики системы с импульсным регулированием приведены на рис. 2.2.1.21.
Рис. 2.2.1.21. Скоростные (механические) характеристики системы с импульсным преобразователем
37

В режиме прерывистого тока независимо от значения γ скорость холо-
стого хода ω0 = Uс(сФном).
Жесткость механических характеристик в этом режиме резко снижается, поэтому обычно стремятся к тому, чтобы система не работала в зоне прерывистого тока.
Импульсное регулирование применяется в системах подземного транспорта, троллейбусах, электрокарах, получающих питание от сетей или источников постоянного тока неизменного напряжения. Оно также широко применяется во многих системах общепромышленных механизмов.
Пример 2.2.1.4. Скорость двигателя постоянного тока независимого возбуждения регулируется по схеме, представленной на рис. 2.2.1.16. Напряжение сети постоянного тока 120 В, сопротивление якоря Rя = 0,5 Ом, индуктивность Lя = 20 мГн, сФ = 0,5 В с. Двигатель нагружен постоянным моментом, которому соответствует ток якоря 20 А. Требуется найти диапазоны регулирования скорости и скважности, считая ток якоря непрерывным.
Решение. Минимальная скорость, при которой Ея = 0, также равна нулю. Из уравнения (2.2.1.6) для якорной цепи двигателя:
U я = Rяiя + 0 = 20 0,5 = 10 В.
Определяем скважность γ:
γ = U я U =10 120 = 0,082.
Максимальная скорость соответствует скважности γ = 1, при которой Uя = U = 120 В, поэтому
Eя = Uя – IяRя = 120 – 20 0,5 = 110 В.
Находим угловую скорость двигателя:
ω = Eя/(сФ) = 110/0,5 = 220 рад/с.
Таким образом, диапазон регулирования скорости составляет 0 < ω < 220 рад/с, а диапазон регулирования скважности 0,082 <γ < 1.
2.2.1.3. Системы электропривода с асинхронными двигателями. Тиристорный регулятор напряжения. Пример расчета. Импульсный регулятор на тиристорах. Пример расчета. Асинхронный вентильный каскад. Пример расчета. Электропривод с частотным управлением. Пример расчета. Электропривод с векторным управлением
Скорость АД можно регулировать различными способами. Первый из них – изменением напряжения, подводимого к статору, при этом частота напряжения на АД не изменяется и равна стандартной частоте сети 50 Гц.
Для регулирования напряжения на статоре АД распространение получили тиристорные регуляторы напряжения (ТРН), обладающие большим быстродействием, высоким КПД, небольшой стоимостью, простотой обслуживания.
38

Трехфазная схема ТРН, построенная на основе однофазных схем ТРН, представлена на рис. 2.2.1.22,а. Она состоит из шести тиристоров VS1...VS6. В каждую фазу трехфазного ТРН включаются два тиристора по встречнопараллельной схеме (рис. 2.2.1.4), обеспечивающей протекание тока в нагрузке в оба полупериода напряжения сети u1. Тиристоры получают импульсы управления uα от СИФУ, которая обеспечивает их сдвиг на угол управления α в функции внешнего сигнала uy. Изменяя угол управления α от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети u1 до нуля.
Рис. 2.2.1.22. Система ТРН-АД (а) и ее характеристики (б)
Форма напряжения статора является несинусоидальной. Несинусоидальное напряжение можно представить как совокупность нескольких синусоидальных напряжений — гармоник, каждая из которых изменяется с определенной частотой. Частота изменения первой из них (основной) равна частоте питающего напряжения f1, а частоты других гармоник больше, чем первой. Основная гармоника имеет наибольшую амплитуду, и по ней ведутся все основные расчеты.
На рис. 2.2.1.22,б показаны механические характеристики АД при изменении напряжения на его статоре. Регулирование напряжения на статоре не приводит к изменению скорости холостого хода ω0 и не влияет на критическое скольжение Sк, но существенно изменяет значение критического (максимального) момента Мк, так как критический момент асинхронного электродвигателя пропорционален квадрату напряжения: Мк ~ U2рег.
Поэтому снижение напряжения приводит к резкому уменьшению Мк и снижению перегрузочной способности АД.
Анализируя форму искусственных характеристик, (рис. 2.2.1.22,б) можно сделать вывод, что если критическое скольжение Sк велико, то изменение
39
напряжения статора можно использовать для регулирования скорости в небольших пределах. Однако с уменьшением скорости увеличивается скольжение S и возрастают потери.
Скольжение S определяется зависимостью
S = ω0 −ω , ω0
где ω0 — скорость идеального холостого хода АД.
Полная мощность на валу, включающая потери на трение и вентиляцию:
Pмех = Mω,
где М — электромагнитный момент двигателя.
Полная электромагнитная мощность, передаваемая от статора к ротору через воздушный зазор
Pэм = Mω0.
Разность мощностей ∆Р2 = Рэм - Рмех рассеивается в виде тепла в активных сопротивлениях ротора. Следовательно, потери в роторе определяются зависимостью
∆P2 = M(ω0 - ω) = M S ω0 = S Pэм. |
(2.2.1.28) |
Электромагнитная мощность двигателя распределяется при этом следующим образом: одна ее часть, пропорциональная скольжению S, рассеивается в виде теплоты в обмотке ротора, а вторая часть, пропорциональная (1 - S), передается на вал двигателя, т.е.
Рмех = (1 - S) Pэм. |
(2.2.1.29) |
В связи с этим способ регулирования угловой скорости изменением напряжения при постоянной частоте сети является неэкономичным, так как потери в роторе при постоянном моменте нагрузки возрастают пропорционально скольжению.
Из (2.2.1.28) следует, что потери в обмотках ротора равны произведению момента и скольжения, поэтому количество теплоты, выделяющееся в двигателе в течение рабочего цикла, можно легко определить, зная момент, скольжение и время работы двигателя на каждом участке цикла.
Покажем, каким образом изменяется ток статора I1 АД при изменении напряжения. Ток статора I1 состоит из двух составляющих, одна из которых пропорциональна току I2 ротора, а вторая является намагничивающим током двигателя. При малых напряжениях намагничивающим током можно пренебречь, поэтому токи I1 и I2 примерно пропорциональны. При работе с большими значениями момента и скольжения по обмоткам ротора и соответственно статора протекают значительные токи, которые могут привести к чрезмерному нагреву двигателя и повреждению более чувствительной к температуре обмотки статора. Поэтому при работе на низких скоростях приходится выбирать двигатели с запасом по мощности.
Из (2.2.1.28) можно получить выражение для момента двигателя
40
M = mI22 r2 (Sω0 ), |
(2.2.1.30) |
где m — число фаз статора; r2 — сопротивление ротора. Таким образом,
M ≡ I22r22 S ≡ I12r2 S .
В установившемся режиме работы момент двигателя М равен моменту сопротивления Мс. Для вентиляторной нагрузки
Mc ≡ω2 ≡ (1−S )2 ,
откуда следует, что
I1 ≡ I2′ ≡ (1−S ) S r2 .
S r2 .
Таким образом, справедлив вывод о том, что токи машины обратно пропорциональны r2 . Продифференцировав последнее выражение, легко
показать, что токи имеют максимальное значение при S = 1/3 или ω = 2/Зω0. Для постоянного момента нагрузки получаем
I1 ≡ I2 ≡  S r2 .
S r2 .
Вэтом случае токи статора и ротора тоже обратно пропорциональны r2, однако они непрерывно возрастают со снижением угловой скорости, и в режиме противовключения, где S > 1, они больше, чем в двигательном режиме.
Полученные выводы показывают, что сопротивление ротора являет-
ся важным параметром, влияющим на токи двигателя. Для получения удовлетворительных режимов работы двигателя с вентиляторным моментом сопротивления на валу необходимо применять двигатели с повышенным сопротивлением ротора, обеспечивающим номинальное скольжение 10...12
%.При работе с постоянным моментом нагрузки сопротивление ротора должно быть еще больше. На рис. 2.2.1.23 приведены характеристики двигателя с повышенным сопротивлением ротора. Их сравнение с характеристиками на рис. 2.2.1.21,б показывает, что при применении двигателя с повышенным сопротивлением ротора удается несколько увеличить диапазон регулирования. Для рассматриваемого способа используются также двигатели с переменным сопротивлением ротора. Обычные глубокопазовые или двухклеточные двигатели в этих случаях оказываются малоэффективными, так как потери от вытеснения тока, определяющие режим работы двигателя, пропорциональны квадрату скольжения, и поэтому они сравнительно невелики при скольжениях меньше 0,5. Лучшие характеристики имеют двигатели с массивным ротором или клиньями, изготовленными в виде постоянных магнитов.
Вэлектромеханических системах с регулируемым напряжением применяются асинхронные двигатели с фазным ротором. Для получения
необходимых механических характеристик в цепь ротора включают дополнительное сопротивление. В этом случае нагрев двигателя уменьшается, так как часть потерь в роторной цепи рассеивается вне двигателя. Однако все перечисленные мероприятия не могут существенно устранить потери в ро-
41

торной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, представленного на рис. 2.2.1.22,а, могут быть использованы контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повысить безотказность работы контакторов.
Рис. 2.2.1.23. Характеристики АД с повышенным сопротивлением ротора
Реверсирование фаз статора можно осуществить бесконтактным способом за счет включения дополнительных тиристорных групп (рис. 2.2.1.24).
Рис. 2.2.1.24. Схема тиристорного регулятора напряжения для реверсивной системы
При вращении двигателя в прямом направлении тиристоры дополнительных групп Х и Y закрыты. Управляющие импульсы к этим тиристорам подаются лишь в том случае, если группы А и С закрыты. При этом изменя-
42

ется порядок чередования фаз приложенного к статору напряжения, и двига-
тель реверсируется. Очень важно, чтобы группы Х и Y открывались лишь
после полного запирания групп А и С, в противном случае возникает ре-
жим короткого замыкания (КЗ). Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают переключение тиристорных групп до тех пор, пока токи не станут равными нулю.
В рассматриваемой системе иногда применяют несимметричное регулирование напряжения, что уменьшает число полупроводниковых устройств. На рис. 2.2.1.25 приведена схема, которая содержит только две пары тиристоров, а третья фаза нагрузки подключена непосредственно к сети. Схема регулятора напряжения может содержать только два тиристора, включенных в одну из фаз статора двигателя.
Рис. 2.2.1.25. Схема несимметричного включения тиристорного регулятора напряжения асинхронного двигателя
В несимметричных схемах усугубляются проблемы, связанные с нагревом двигателя, так как нагрузка между его фазами распределяется неравномерно и некоторые фазы оказываются сильно перегруженными. Для несимметричной нагрузки линейные напряжения, приложенные к зажимам статора в общем случае, не равны друг другу:
U&AB ≠ U&BC ≠ U&CA .
Если магнитная цепь асинхронного двигателя не насыщена, то система несимметричных напряжений с помощью метода симметричных составляющих может быть заменена двумя системами симметричных напряжений прямой и обратной последовательностей, которым соответствуют магнитные потоки двигателя, вращающиеся в противоположных направлениях.
Если принять угловую скорость прямого поля ωпр = ω0 за положительную, то угловая скорость обратного поля ωобр =-ω0. В соответствии с этим скольжение относительно поля прямой последовательности:
Sпр = ωпр −ω = ω0 −ω = S ,
ωпр ω0
относительно поля обратной последовательности:
Sобр = ωобр −ω = −ω0 −ω = ω0 −ω −2ω0 = 2 −S .
ωобр −ω0 −ω0
43

Момент, развиваемый двигателем при асимметричной системе напряжений, равен алгебраической сумме моментов, обусловленных полями прямой и обратной последовательностей:
M = Mпр + Mобр.
Поскольку каждая из рассматриваемых систем напряжений симметрична, для них справедливы известные формулы расчета момента асинхронного двигателя.
Несмотря на все отмеченные недостатки система ТРН-АД вследствие ее простого конструктивного исполнения нашла широкое применение, так как она позволяет обеспечить плавный пуск и торможение электродвигателя, ограничить пусковой момент и токи, изменять направление скорости АД. На базе ТРН изготовляются тиристорные реверсивные и нереверсивные контакторы для пуска, реверса и торможения АД.
Одна из реальных областей применения системы ТРН-АД связана с использованием ее в электроприводах насосных и вентиляторных установок. Это объясняется тем, что снижение скорости электропривода приводит к резкому уменьшению момента сопротивления этих механизмов. Тем самым становится возможным регулирование скорости АД в области допустимых потерь энергии.
Пример 2.2.1.5. Трехфазный четырехполюсный АД на напряжение Uл = 380 В и частоту f = 50 Гц с обмотками, соединенными «в звезду», имеет следующие параметры Т-образной схемы замещения: r1 = 1,01 Ом; r`2= 0,69 Ом;
х1 = 1,3 Ом; х'2 = = 1,94 Ом; х12 = 43,5 Ом.
Потерями холостого хода (XX) можно пренебречь. Нагрузочный момент, который пропорционален квадрату скорости, равен 43 Н м при частоте вращения n = 1470 мин-1. При условии, что двигатель работает с частотой вращения 1350 мин-1, а регулирование осуществляется по схеме, приведенной на рис. 2.2.1.22,а, определить: момент нагрузки, ток ротора I`2, напряжение статора U1, потребляемый двигателем ток, потребляемую мощность, скольжение при максимальном токе, максимальный ток ротора, скорость при максимальном токе ротора, момент при максимальном токе.
Решение.
Uф = 380 3 = 220 В; ω0 = 157 рад/с.
3 = 220 В; ω0 = 157 рад/с.
Поскольку по условию момент пропорционален квадрату скорости, то
M= Kм ω2;
ω= 1470π/30= 153,86 рад/с при М = 41 Н м.
Тогда Км = 41/153,862 = 1,73 10-3 Н м/(рад/с); ω = 1350 π/30 = 141,3
рад/с.
Определяем скольжение двигателя для этой скорости:
S = 157 −141,3 = 0,1. 157
44

Момент двигателя при ω = 141,3 рад/с: М = Км ω2 = 1,73 10-3 141,32 = 34,54 Н м.
Из уравнений (6.1)...(6.3) определяем ток ротора I2', пренебрегая потерями XX:
I ′ |
= |
|
S Mω |
1/ 2 |
= |
|
0,1 34,54 141,3 |
1/ 2 |
=16А. |
|
|
3r′(1− S ) |
|
3 0,69 (1− 0,1) |
|
||||||
2 |
|
|
|
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
Фазное напряжение статора:
|
|
|
|
|
|
|
|
|
|
|
r′ |
|
2 |
|
|
2 |
1/ 2 |
|
|
|
||||
|
|
U |
1 |
= |
I |
′ |
r |
+ |
2 |
|
|
|
+ (x |
+ x′ ) |
|
; |
|
|
||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
2 |
1 |
|
S |
|
|
|
1 |
2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,69 |
2 |
|
|
|
|
|
2 |
1/ 2 |
|
|
|
|
|
||||
U1 |
=16 1,01 |
+ |
|
|
|
|
|
+ |
(1,3+1,94) |
|
=136,76В. |
|
||||||||||||
|
|
0,1 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Входное сопротивление схемы замещения АД определяется зависимо- |
||||||||||||||||||||||||
стью |
|
|
|
|
− x12 (x1 + x2′ )+ jx12 (r1 + r2′ S ) |
|
|
|
||||||||||||||||
|
|
Zi = |
; |
|
|
|||||||||||||||||||
|
|
|
|
r1 + r2′ S + j(x12 + x1 + x2′ ) |
|
|
|
|
||||||||||||||||
Zi = |
− |
43,5(1,3+1,94)+ j43,5(1,01+0,69 0,1) |
= 6,4 |
+ j4,089 |
; |
|||||||||||||||||||
|
1,01+ 0,69 0,1+ j(43,5 +1,3+1,94) |
|
||||||||||||||||||||||
|
|
|
|
|
|
I2′ = |
136,76 |
|
=17,92 А. |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
7,63 |
|
|
|
|
|
|
|
|
|
|
|
||
Находим cos(ϕ) = 0,714.
Входная мощность:
P1 = 3 136,76 17,92 cos(ϕ) = 5,25 кВт; ω = ω0 (1 - S); Mc = Kм ω2, тогда
|
|
S Mω 1/ 2 |
S K мω 1/ 2 |
|
||||
I2′ |
= |
|
|
|
= (1− S )ω0 |
|
. |
(6.4) |
3r′(1 |
− S ) |
3r′ |
||||||
|
|
2 |
|
|
|
2 |
|
|
Скольжение, при котором ток ротора I`2 максимален, находится из выражения
ddSI2′ = 0 .
Отсюда S = 1/3.
Подставив это значение в выражение для тока, получим максимальное значение тока ротора:
I ′ |
= ω |
|
|
4 Kмω0 |
1/ 2 |
=157 |
4 1,73 10−3 157 |
1/ 2 |
= 21,89 A . |
|
|
81r′ |
|
81 0,69 |
|
||||
2max |
|
0 |
|
|
|||||
|
|
|
|
2 |
|
|
|
|
|
Частота вращения при максимальном токе:
n = n0 (1 - S) = 2/3 1500 = 1000 мин-1.
Используя уравнение (6.4), определим момент при максимальном токе:
M = 9 |
(I2′max )2 |
r2′ |
= 9 |
(21,89)2 |
0,69 |
=18,95Н м. |
ω0 |
|
|||||
|
|
|
157 |
|
||
|
|
|
|
45 |
|
|
Импульсный регулятор на тиристорах
Пуск и регулирование скорости асинхронного электродвигателя с фазным ротором в простейшем случае осуществляются включением в каждую фазу ротора реостатов с одинаковым сопротивлением Rд. В этом случае плавное регулирование скорости отсутствует: переход с характеристики на характеристику при пуске, торможении или при изменении скорости сопровождается скачками тока и момента. Поэтому при таком способе управления двигателем плавность пуска и регулирования скорости обеспечивается только за счет увеличения числа пусковых ступеней. Это вынуждает использовать громоздкие релейно-контакторные схемы с большим числом коммутирующих аппаратов. Таким образом, в реальных установках плавность регулирования ограничена. Ограниченным является также и диапазон регулирования скорости, так как жесткость характеристик при реостатном регулировании существенно снижается.
Указанные недостатки отсутствуют в специальных системах, где использовано импульсное управление сопротивлением роторных резисторов. Схема импульсного регулирования добавочного сопротивления в роторной цепи АД приведена на рис. 2.2.1.26,а.
Дополнительное сопротивление Rд включено в роторную цепь через неуправляемый выпрямитель. Для уменьшения пульсаций выпрямленного тока последовательно с сопротивлением включается реактор L. Параллельно сопротивлению включается управляемый ключ (коммутатор) К. Основным элементом ключа является тиристор VS. Управление ключом осуществляется с помощью специального блока управления БУ, который производит включение и выключение тиристора VS. При подаче сигнала управления на тиристор он открывается и замыкает накоротко сопротивление Rд. При сопротивлении Rд = 0 двигатель работает на характеристике 1 (рис. 2.2.1.26,б), близкой к естественной. Различие в характеристиках объясняется дополнительным падением напряжения в роторной цепи за счет наличия выпрямителя и управляемого ключа. Если тиристор закрыт, то двигатель будет работать на искусственной характеристике 2, соответствующей случаю включения в каждую фазу ротора добавочного сопротивления.
Рассмотрим случай периодического включения и отключения тиристора. Коммутация ключа К обычно осуществляется таким образом, что период коммутации Тк остается неизменным, а изменяется лишь соотношение времени выключенного tвыкл и включенного tвкл состояний тиристора Т. При этом сопротивление резистора Rд изменяется в соответствии с диаграммой рис. 2.2.1.26,в. Такое изменение сопротивления Rд во времени эквивалентно тому, что в роторную цепь включен добавочный резистор, сопротивление которого равно среднему значению сопротивления Rд за период Tк:
RД.СР = |
RДtвыкл |
RД (1−γ ), |
(2.2.1.31) |
|
|||
|
T |
|
|
|
к |
|
|
|
46 |
|
|

где γ = tвкл/Tк — относительное время включенного состояния ключа при его периодической коммутации, называемое также скважностью коммутации.
Рис. 2.2.1.26. Импульсное регулирование добавочного сопротивления в цепи ротора АД: 1 — естественная характеристика; 2 — искусственная характеристика
Таким образом, изменяя γ, можно изменять эквивалентное добавочное
сопротивление в цепи от нуля при γ = 1, или tвкл = Тк до Rд при γ = 0, или tвкл = 0.
47
Это позволяет получить семейство механических характеристик асинхронного электропривода при разных значениях скважности γ, которые располагаются между граничными характеристиками 1 и 2, соответствующими
γ = 1 и γ = 0 (см. рис. 2.2.1.26,б).
Основные преимущества импульсного метода управления асинхрон-
ным электродвигателем — это простота реализации, малая мощность управления тиристорным коммутатором, плавное бесступенчатое регулирование скорости, возможность введения отрицательных обратных связей по скорости электродвигателя и выпрямленному току, что позволяет формировать требуемые механические характеристики.
Недостатком импульсного регулирования сопротивления, так же как и ступенчатого, является увеличение потерь энергии в электродвигателе по мере снижения скорости. Поэтому рассмотренный способ регулирования до-
бавочного сопротивления рекомендуется применять в электроприводе
тех механизмов, где необходим плавный пуск, а также регулирование скорости в малых пределах. К таким механизмам относятся, например, конвейерные установки.
Энергетические показатели при импульсном регулировании сопротивления несколько хуже, чем при ступенчатом. Это объясняется тем, что при периодическом включении и отключении добавочного сопротивления возникают колебания токов электродвигателя, что приводит к увеличению его нагрева. Кроме того, включение выпрямителя приводит к искажению формы токов электродвигателя, высшие гармоники которых дополнительно нагревают электродвигатель. Импульсное регулирование асинхронных двигателей возможно и по цепи статора.
Пример 2.2.1.6. Трехфазный АД с фазным ротором напряжением Uл = 380 В, частотой 50 Гц включен по схеме регулирования, приведенной на рис. 2.2.1.26,а. Двигатель имеет следующие параметры: r1 = 0,041 Ом; r2'= 0,044 Ом; х1 = 0,29 Ом; х`2= 0,44 Ом; х12 = 6,1 Ом.
Отношение чисел витков фаз обмоток ротора к статорным К = ω2/ω1 = 0,9. Индуктивность Ld велика, поэтому выпрямленный ток Id имеет пренебрежимо малые пульсации. Параметры схемы замещения r1, r2', х1 и х`2 малы по сравнению с индуктивностью Ld. Потерями XX в выпрямителе, тиристорном ключе и индуктивности Ld пренебрегаем. Момент нагрузки, который пропорционален квадрату скорости, М = 750 Н м при частоте вращения n =
910мин-1. Необходимо:
1)определить сопротивление RД, при котором двигатель работал бы с минимальной частотой вращения n = 620 мин-1;
2)с полученным значением RД при требуемой частоте вращения 810 мин-1
рассчитать: ток Id через индуктивность; скважность ключа γ; напряжение постоянного тока Ud, КПД, коэффициент мощности (соs(ϕ)) системы.
48

Решение.
Напомним, что RД.cp = Rд (1 - γ).
Постоянное выходное напряжение выпрямителя определяется следующей зависимостью:
Ed = Id RД.СР = Id RД (1 - γ).
Напряжение на роторе
E2 = SUф ω2 = SUфK .
ω1
Для трехфазного выпрямителя
Ed =1,654 2E2 = 2,34E2 ,
2E2 = 2,34E2 ,
или |
|
|
|
|
Ed = 2,34SUфK . |
|
|
|
|
|
|
(2.2.1.32) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Если РS — мощность скольжения, то электромагнитная мощность |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
Pэм |
= |
|
PS |
|
, |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
а механическая мощность |
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3PS (1−S ) |
|
|
|
|||||||||||
|
|
Pм = 3(Pэм |
−PS )= |
|
PS |
|
|
|
|
|
|
|
. |
|
|
||||||||||||
|
|
3 |
|
|
|
|
|
− PS |
= |
|
|
|
|
|
|||||||||||||
|
|
|
S |
|
|
|
S |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Так как суммарная мощность скольжения 3PS = Ud Id и Рн = Мω, тогда |
|||||||||||||||||||||||||||
|
|
|
Pм = |
(1−S )Ud Id |
|
|
= Mω = Mω0 (1− S ). |
|
(2.2.1.33) |
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставив (2.2.1.32) в (2.2.1.33), получим |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
Id = |
|
Mω0 |
. |
|
|
|
|
|
|
|
(2.2.1.34) |
||||||||||
|
|
|
|
|
|
2,34UфK |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Последнее выражение показывает, что ток в индуктивности не зависит |
|||||||||||||||||||||||||||
от скорости |
|
|
2,34S Uф K = Id Rd (1−γ ), |
|
|
|
|||||||||||||||||||||
|
Id Rd (1−γ ) |
|
|
|
|
||||||||||||||||||||||
откуда S = |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
2,34UфK |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Скорость может быть получена в виде |
|
|
|
|
Mω0 R(1−γ ) |
|
|
||||||||||||||||||||
|
|
(1−S )=ω |
|
|
|
Id Rd (1−γ ) |
|
|
|
|
|
|
|
|
|||||||||||||
ω =ω |
0 |
1− |
|
=ω |
0 |
1− |
. |
(2.2.1.35) |
|||||||||||||||||||
|
|
||||||||||||||||||||||||||
0 |
|
|
|
|
2,34U |
фK |
|
|
|
|
(2,34U |
2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
фK ) |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из последнего выражения следует, что при заданном коэффициенте передачи скорость снижается при увеличении момента нагрузки.
Варьируя γ от 0 до 1, можно изменять скорость от минимальной до ω
ω= 62030π = 64,9 рад/ с.
1.При частоте вращения 620 мин-1
M = 750 |
620 |
2 |
= 348 Н м. |
|
910 |
|
|
|
|
|
49

Соответствующий ток в индуктивности
Id = 348 104,66 = 78,64 А. 2,34 220 0,9
Скорость будет минимальной, когда γ = 0. Из уравнения (2.2.1.35) получим
|
|
78,64 Rd |
|
|
69,4 =104,66 1 |
− |
|
. |
|
2,34 220 0,9 |
||||
|
|
|
Этой скорости соответствует RД = 2,24 Ом. 2. При частоте вращения 810 мин-1:
|
810 |
2 |
||
M = 750 |
|
|
= 594 Н м. |
|
910 |
||||
|
|
|
||
ω = 810π 30 = 84,78рад/с.
30 = 84,78рад/с.
Подставив это значение в уравнение (2.2.1.35), получим
|
|
134,6 2,24(1−γ ) |
||
84,88 =104,66 1 |
− |
|
. |
|
2,34 220 0,9 |
||||
|
|
|
||
В этом случае γ = 0,7. Определим скольжение
S = 104,66 −84,78 = 0,19 . 104,66
Из уравнения (2.2.1.32)
Ud = 2,34 0,19 220 0,9 = 88 В.
Определим мощность потерь
Pэл = Ud Id = 88 134 = 11796 Вт.
Выходная мощность
P2 = M ω = 594 84,78 = 50359 Вт.
Действующее значение тока ротора, приведенное к статору
I2 =  23 Id K =
23 Id K =  23 134 0,9 = 98,4А.
23 134 0,9 = 98,4А.
Электрические потери в роторе
Pэ2 = 3 0,044 (98,4)2 = 1279 Вт;
потери в статоре
Pэ1 = 3 0,041 (98,4)2 = 1190 Вт.
Потребляемая мощность
P1 = 50359 + 11796 + 1279 + 1190 =64624 Вт.
Первая гармоника тока ротора, приведенная к числу витков статора, определяется зависимостью
I21 = 0,7797 Id ω2 = 0,7797 134 0,9 = 94 А.
ω1
Действующее значение намагничивающего тока
50
Im ≈ |
U |
= |
220 |
= 36А. |
|
xm |
6,1 |
||||
|
|
|
Действующее значение первой гармоники потребляемого тока
|
11 |
= |
|
( |
d |
|
2 |
U |
2 1/ 2 |
= |
|
2 |
+ |
|
2 |
= |
|
. |
||
I |
|
K |
) |
+ |
|
94 |
|
36 |
|
100А |
||||||||||
|
|
0,7797 I |
|
|
|
xm |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для расчета коэффициента мощности определим угол ϕ, град:
|
U x |
m |
|
|
36 |
|
ϕ = arctg |
|
|
= |
|
= −21. |
|
|
|
|
||||
|
|
|
|
|
94 |
|
|
0,7797 Id K |
|
|
|||
Коэффициент мощности при этом соs(ϕ) = cos (-21°) = 0,93 (отстающий).
Асинхронный вентильный каскад
В электромеханических системах, где применяется асинхронный двигатель с фазным ротором, возможно регулирование скорости изменением сопротивления дополнительного резистора RД, включенного в роторную цепь. Однако регулирование скорости сопровождается выделением в роторной цепи потерь мощности, пропорциональных скольжению. Поэтому этот способ не является экономичным [4]. Потери мощности в роторе могут составить ощутимое значение. Пусть диапазон регулирования скорости D = 2:1, момент электродвигателя постоянен и равен номинальному. Тогда при скольжении S = 0,5, что соответствует половине синхронной скорости, потери мощности в роторе:
∆P2 = Mном ω0 S ≈ 0,5 Pном,
где принято, что ω0 ≈ ωном.
Следовательно, потери мощности могут составлять половину номинальной мощности электродвигателя Рном. При увеличении диапазона регулирования скорости эти потери возрастают еще больше. В общем случае при скольжении S электромагнитная мощность передается на вал ротора с КПД, равным 1 - S, а полный КПД двигателя оказывается меньше этого значения. При низких угловых скоростях электромагнитная мощность почти полностью рассеивается в цепи ротора, поэтому КПД двигателя в этом случае име-
ет очень малое значение. Регулирование скорости в широком диапазоне изменением сопротивления ротора связано с большими потерями. Реализо-
вать непосредственно энергию скольжения асинхронного двигателя затруднительно, так как частота в роторной цепи отлична от частоты питающей сети. Однако при некоторых технических решениях это возможно. Первые схемы, позволяющие использовать энергию скольжения асинхронного двигателя, создавались путем специального соединения асинхронного двигателя с другими электрическими машинами. Поэтому они на-
51
зывались каскадными. Вентильные преобразователи позволили создавать каскадные схемы без вращающихся электрических машин.
В общем случае каскадными называют такие схемы включения
асинхронного двигателя, которые позволяют использовать энергию скольжения путем отдачи ее в сеть или превращения ее в механическую энергию, передаваемую на вал главного двигателя.
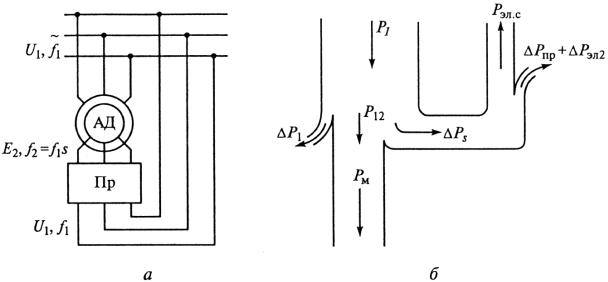
Существует две принципиально различные группы схем каскадов. В первой из них, как показано на рис. 2.2.1.27,а, на вход преобразователя Пр поступает энергия скольжения частоты f2 = f1 S с колец АД, а выход преобразователя, характеризующийся напряжением U1 и частотой сети f1 соединен с питающей сетью.
В каскадах этой группы энергия скольжения ∆PS за вычетом потерь энергии непосредственно в обмотке ротора АД и элементах преобразователя Пр ∆Рпр + ∆РЭЛ2 возвращается в питающую сеть, что иллюстрируется энергетической диаграммой на рис. 2.2.1.27,б. Между элементами преобразователя и асинхронным двигателем в схеме на рис. 2.2.1.27,а имеется только электрическое соединение. Поэтому такие каскадные установки называются электрическими.
Рис. 2.2.1.27. Принципиальная схема (а) и энергетическая диаграмма (б) электрического каскада
На рис. 2.2.1.28,а изображена принципиальная схема каскадных установок другого типа. Энергия скольжения в каскадах этой группы поступает на вход преобразователя. Преобразователь на выходе создает напряжение UВД, которое подается на зажимы вспомогательного двигателя ВД. Последний преобразует электрическую энергию, поступающую от преобразователя в механическую, которая возвращается на вал АД, поскольку валы АД и ВД механически соединены между собой.
52

Если пренебречь потерями в двигателях каскада, то становится очевидным, что на вал каскадной установки от АД поступает механическая мощность РмАД = Mω, а от ВД — электромагнитная мощность PэмВД = ∆PS =
Mω0S.
Суммарная механическая мощность на валу каскада
Pв = PмАД + PэмВД ≈ Mω + Mω0S = Mω0 = P12.
В этом случае механическая мощность на валу каскада примерно равна электромагнитной мощности, передаваемой со статора на ротор асинхронного двигателя. Из рис. 2.2.1.28,а видно, что элементы преобразователя соединены с АД как электрическим (вход Пр — кольца АД), так и механическим путями (вал ротора ВД — вал ротора АД). Поэтому такие каскады называются электромеханическими. Приведенная на рис. 2.2.1.28,б энергетическая диаграмма характеризует последовательность преобразования энергии электромеханического каскада.
Рис. 2.2.1.28. Принципиальная схема (а) и энергетическая диаграмма (б) электромеханического каскада
В качестве АД может быть использован только асинхронный двигатель с фазным ротором, который называется главным приводным двигателем.
Момент на валу электрического каскада равен моменту только АД, а момент на валу электромеханического каскада равен сумме моментов АД и ВД.
Принцип работы каскадов заключается во введении в цепь ротора АД добавочной ЭДС, с помощью которой можно регулировать угловую скорость двигателя. Покажем, каким образом это возможно. Положим, что АД работает в двигательном режиме, потребляя электрическую энергию из питающей сети переменного тока и отдавая энергию скольжения в роторную
53

цепь. Пусть к валу электродвигателя приложен статический момент Мс, не зависящий от скорости. Если добавочная ЭДС в роторной цепи EДОБ = 0, то ток ротора определяется только ЭДС роторной обмотки и ее параметрами. При введении в цепь ротора Едоб часть энергии скольжения потребляется источником ЭДС, а количество электрической энергии, выделяемой непосредственно в обмотке ротора, уменьшается. Это приводит к уменьшению тока ротора согласно выражению
I2′ = |
E2 − EДОБ |
. |
(2.2.1.36) |
|
|||
|
Z2 |
|
|
Уменьшение тока ротора определяет уменьшение электромагнитного момента двигателя, который становится меньше статического момента нагрузки, и двигатель начинает замедляться. Но при уменьшении частоты вращения увеличивается скольжение, а значит, и ЭДС ротора, так как Е2 = E2KS (где E2K — ЭДС в неподвижном роторе). Увеличение Е2 приводит к увеличению тока I'2 и момента АД. Когда момент каскадной установки вновь становится равным статическому моменту Мс, двигатель перестает замедляться и вновь работает в установившемся режиме, но уже при более низкой, чем ранее, скорости.
Очевидно, что при увеличении добавочной ЭДС ротора угловая скорость двигателя уменьшается, а при уменьшении ЕДОБ — увеличивается. При ЕДОБ = 0 АД работает на механической характеристике, близкой к естественной.
В современных каскадных схемах используются статические полупроводниковые преобразователи.
На рис. 2.2.1.29,а приведена схема асинхронного вентильного каскада (АВК). Инвертор И преобразует постоянный ток ротора АД в переменный, состоит из управляемых тиристоров. Трансформатор Т согласует напряжение ротора двигателя с напряжением сети. Добавочной ЭДС, вносимой в цепь выпрямленного тока ротора АД, является ЭДС инвертора, которая регулируется изменением угла опережения открывания тиристоров β. Выпрямитель В – трехфазный мостовой выпрямляет ток ротора двигателя АД. Реактор L сглаживает пульсации выпрямленного тока. При работе АВК мощность скольжения с ротора АД через выпрямитель, инвертор и трансформатор поступает обратно в электрическую сеть, где она полезно используется. Регулирование ЭДС инвертора приводит к изменению потока энергии от ротора АД в сеть и, как следствие, к изменению скорости электропривода. В соответствии со схемой замещения (рис. 2.2.1.29,б) для цепи выпрямленного тока ротора можно записать
|
|
EdВ −EdИ = Id RЭ +∆UВ +∆UИ , |
(2.2.1.37) |
где EdВ = |
3 3 |
E2KS — ЭДС трехфазного мостового выпрямителя; Е2К — дей- |
|
|
π |
|
|
ствующее значение линейной ЭДС на кольцах неподвижного ротора АД (S = 54

1); EdИ = 3π2 U2 cos(β)— ЭДС трехфазного мостового инвертора; U2 — дей-
ствующее значение вторичного линейного напряжения трансформатора; (β
— угол опережения инвертора; ∆Uв и ∆Uи — падение напряжения соответственно в диодах выпрямителя и тиристорах инвертора; Id — ток, протекающий в цепи выпрямленного тока; RЭ — эквивалентное сопротивление цепи выпрямленного тока
RЭ = 3πxp S + 3πxT + 2rp + rф + 2rT ,
где хр, хт — индуктивные сопротивления фазы ротора АД и трансформатора Т; rр, rт, rф — активные сопротивления фазы ротора АД, трансформатора и сглаживающего реактора.
Выпрямленный ток
3 |
2 |
E2K S − |
3 |
2 |
U2 |
cos(β)−∆U В −∆U НОМ |
|
|
|
Id = |
π |
|
π |
|
. |
(2.2.1.38) |
|||
|
|
|
|
|
|||||
|
|
|
|
|
|
RЭ |
|||
|
|
|
|
|
|
|
|
|
|
Рис. 2.2.1.29. Асинхронный вентильный каскад
Момент, развиваемый асинхронным двигателем, пропорционален выпрямленному току ротора. Следовательно, регулирование последнего изменением ЭДС инвертора позволяет регулировать момент и частоту вращения двигателя.
Если выпрямленная ЭДС инвертора равна выпрямленному напряжению ротора двигателя, то ток в цепи ротора и момент, развиваемый двигателем, равны нулю.
55

При уменьшении ЭДС инвертора ток в цепи ротора возрастает, момент двигателя увеличивается, и частота вращения повышается. Так как с увеличением частоты вращения скольжение S и ЭДС трехфазного мостового выпрямителя уменьшаются, то ускорение двигателя происходит до тех пор, пока момент двигателя не становится равным моменту нагрузки.
При увеличении ЭДС инвертора ток ротора и момент уменьшаются, и частота вращения двигателя снижается. По мере уменьшения частоты вращения повышается выпрямленное напряжение ротора. Ток ротора и момент двигателя увеличиваются до тех пор, пока момент, развиваемый двигателем, снова не становится равным статическому моменту сопротивления. При этом двигатель начинает работать в установившемся режиме с новым значением частоты вращения (скольжения).
При постоянстве управляющего воздействия и изменении момента нагрузки на валу переходный процесс протекает аналогично изложенному. Например, при увеличении момента на валу двигателя частота вращения снижается, вследствие этого возрастает ЭДС ротора и, следовательно, увеличивается выпрямленный ток и момент двигателя до тех пор, пока момент двигателя не становится равным моменту сопротивления на его валу.
В режиме холостого хода момент на валу двигателя и ток ротора равны нулю. Поэтому должны быть взаимно уравновешены выпрямленные напряжения в выражении (6.11), т.е.
3 2 |
E2K S − |
3 2 U2 cos(β)= 0 |
|
|
π |
|
|
π |
|
или |
|
|
|
|
S = (U2 |
E2K )cos(β)= K cos(β), |
(2.2.1.39) |
||
где К — коэффициент трансформации асинхронного двигателя.
Если К = 1, то скорость холостого хода двигателя можно регулировать до номинального значения.
Для того, чтобы двигатель развивал момент, в цепи ротора должен протекать ток, при этом выпрямленное напряжение ротора должно обеспечить протекание этого тока навстречу ЭДС инвертора. Это достигается за счет некоторого снижения угловой скорости двигателя при увеличении нагрузки, что приводит к соответствующему увеличению напряжения и тока ротора. При малом сопротивлении ротора мощность скольжения PэмS, определяемая первыми гармониками тока и напряжения, примерно равна мощности в цепи выпрямленного тока
PэмS = EdИ Id. |
(2.2.1.40) |
Учитывая, что Рэм = Мω0, можно получить
M = EdИ Id/(Sω0). (2.2.1.41)
Если не учитывать падение скорости при нагрузке, то полученное соотношение можно подставить в формулу (2.2.1.39), справедливую для сколь-
56

жения при холостом ходе двигателя. Используя зависимость для ЭДС инвертора, получим следующее выражение для момента:
M = |
3 2 |
U2 Id (Kω0 ). |
(2.2.1.42) |
|
|||
|
π |
|
|
Следовательно, момент в установившемся режиме пропорционален выпрямленному току ротора Id, который, в свою очередь, линейно зависит от разности выпрямленной ЭДС выпрямителя и ЭДС инвертора. На рис. 2.2.1.29,в показан примерный вид механических характеристик АВК. Меньшая жесткость характеристик АВК по сравнению с естественной характеристикой асинхронного электродвигателя объясняется дополнительными падениями напряжения в выпрямителе, инверторе, трансформаторе, что учитывается эквивалентным сопротивлением Rэ.
Рассматриваемая схема АВК обеспечивает двигательный режим работы при скорости ниже синхронной; скорость плавно регулируется вниз от естественной характеристики. Пуск асинхронного двигателя в схеме АВК — резисторный. Ротор при пуске отсоединяется от выпрямителя и подключается к пусковому резистору. После достижения номинальной скорости ротор асинхронного двигателя подключается к выпрямителю. Для торможения в приведенной схеме АВК используется динамическое торможение.
Принципиальным недостатком АВК является его низкий коэффи-
циент мощности. Если схема рассчитана для регулирования скорости в широком диапазоне, то при номинальной нагрузке и максимальной скорости коэффициент мощности не может быть более 0,5, уменьшаясь до 0,3 и менее при снижении угловой скорости. Низкий коэффициент мощности частично вызван потреблением дополнительной реактивной мощности, необходимой для коммутации тиристоров выпрямительного моста в цепи ротора.
Реактивная мощность, потребляемая инвертором, тоже снижает общий коэффициент мощности системы. Среднее значение ЭДС инвертора максимально при наименьшей угловой скорости двигателя. Максимальной ЭДС в идеальном случае соответствует угол управления, равный 180°, однако в действительности по причине процессов коммутации и запаса на восстановление запирающих свойств тиристоров он несколько меньше 180°. Это приводит к тому, что токи на выходе инвертора опережают соответствующие фазные напряжения, т.е. инвертор работает как генератор опережающей реактивной мощности или как потребитель отстающей реактивной мощности. Потребление реактивной мощности увеличивается по мере уменьшения угла управления, которое производится с целью снижения ЭДС инвертора и скольжения двигателя. При полной угловой скорости угол управления равен 90°, и кажущаяся мощность инвертора почти полностью является реактивной. Для любого значения угла управления активная мощность каскада равна разности соответствующих мощностей, потребляемой двигателем и возвращаемой в сеть инвертором. В то же время полная реактивная мощность
57
состоит из суммы реактивных мощностей двигателя и инвертора, поэтому коэффициент мощности каскада падает со снижением скорости, так как потребление активной мощности при этом уменьшается.
Каскадные схемы включения АД целесообразно использовать для двигателей большой мощности, где необходима реализация мощности скольжения, которая может составлять несколько тысяч киловатт. Для уникальных регулируемых электромеханических систем мощность двигателя может достигать 20...30 тыс. кВт. В этих случаях применение каскадных установок может явиться единственно возможным техническим решением.
В то же время применение современных средств преобразовательной техники позволяет создавать каскадные электромеханические системы с хорошими регулировочными свойствами, удовлетворяющими требованиям многих производственных механизмов. Тогда становится оправданным их применение и для двигателей меньшей мощности.
Объем и стоимость оборудования каскадных схем находится в прямой зависимости от требуемого диапазона регулирования. Поэтому наиболее
выгодно применять АВК при неглубоком регулировании скорости, когда диапазон регулирования не превышает значения D = 2:1.
Примерами использования АВК являются системы мощных вентиляторов, насосов, компрессоров.
Пример 2.2.1.7. Асинхронный двигатель из примера 2.2.1.6 управляется по схеме асинхронного вентильного каскада, приведенного на рис. 2.2.1.29,а. Отношение переменного напряжения преобразователя к питающему напряжению n2 = 0,4. Момент нагрузки М = 750 Н • м при n = 910 мин-1. Рассчитать для случая, когда двигатель работает при частоте вращения 850 мин-1, ток в индуктивности Id; напряжение постоянного тока Ed; угол опережения инвертора β и КПД. Потерями в выпрямителе и инверторе, а также в трансформаторе и реакторе можно пренебречь.
Решение.
Uф = 220 В, ω0 = 104,66 рад/с.
Угловая скорость ротора и скольжение равны соответственно:
ω = |
850π |
= 88,96 рад/ с; |
|
|
S = |
104,66 −88,96 |
= 0,15 . |
30 |
|
|
104,66 |
||||
|
|
|
|
|
|
||
Определяем момент |
|
|
|
|
|
||
|
|
|
850 |
|
2 |
|
|
|
|
M = 750 |
|
|
= 654Н м. |
|
|
|
|
910 |
|
||||
|
|
|
|
|
|
|
|
Без учета параметров двигателя из (6.15)
Id = |
Mω0 |
= |
654 104,66 |
=147,7 А. |
|
2,34UфK |
2,34 220 0,9 |
||||
|
|
|
Определяем выпрямленное напряжение
Ed = 2,34SUфK = 2,34 0,15 220 0,9 = 69,5 В. 58