

1327308486__gos_jekz(для телефона)
.pdfперед машиной и сзади нее; силы сопротивления, создаваемой выступающими частями машины (подножки, крылья и др.), силы сопротивления, возникающей при прохождении воздуха через радиатор и подкапотное пространство; силы трения наружной поверхности машины о близлежащие слои воздуха и силы сопротивления, вызванной разностью давлений сверху и снизу машины.
Силу Pw определяют по формуле, полученной опытным путем:
P K |
w |
F |
(V )2 |
, |
(3.7) |
w |
a |
a |
|
|
где Kw - коэффициент сопротивления воздуха, Нс2/м4; Fa - лобовая площадь машины, м2;
Va - скорость движения машины, м/с.
Значение лобовой площади машины (Fa) можно приблизительно определить по формуле:
Fa H B, |
(3.8) |
где Н – высота машины, м; В – ширина колеи передних колес, м.
3.4.Сила сопротивления разгону
Сила, которую нужно приложить к автомобилю, чтобы сообщить ему поступательное ускоренное движение, зависит от его массы и ускорения:
P |
Ga ja |
, |
(3.9) |
|
|||
j |
g |
|
|
|
|
||
где jа – ускорение автомобиля, м/с2; Ga – сила тяжести автомобиля, Н;
g – ускорение силы тяжести (g = 9,81 м/с2).
При разгоне автомобиля часть тяговой силы затрачивается на ускорение вращающихся деталей. Энергия, затрачиваемая на разгон автомобиля и раскручивание колес, маховика, шестерен коробки передач и дифференциала, больше энергии, необходимей для разгона автомобиля, все детали которого движутся только поступательно. Это положение учитывается коэффициентом учета вращающихся масс
21
|
|
|
P |
|
|
||
|
P |
|
|
||||
|
|
n |
в 1 |
Pв |
, |
(3.10) |
|
|
|||||||
a Pn Pn
где Рп – сила, необходимая для разгона поступательно движущейся массы, Н;
Рв – сила, необходимая для разгона вращающихся масс, Н.
Коэффициент а учета вращающихся масс в общем виде учитывает вращение массы маховика двигателя и колес автомобиля, так как влияние остальных вращающихся масс весьма мало. Тогда сила, преодолеваемая автомобилем при разгоне, может быть выражена как суммарная сила сопротивления разгону:
P |
Ga |
ja |
a |
|
|
|
|
. |
(3.11) |
||
j |
|
g |
|||
|
|
|
|
|
|
Если значения моментов инерции неизвестны, то для грузовых автомобилей коэффициент учета вращающихся масс приближенно определяется по эмпирической формуле
a 1,05 0,07 (Iк )2, |
(3.12) |
где Iк - передаточное число коробки передач.
3.5.Уравнение движения машины
Уравнение движения автомобиля связывает силу тяги Рк с силами сопротивления его движению и позволяет определить характер движения машины в каждый момент времени. Сила тяжести Ga приложена на высоте центра тяжести hц машины и направлена вертикально вниз. Суммарная сила сопротивления разгону условно приложена на высоте центра тяжести и направлена противоположно ускорению jа. Силы сопротивления качению передних и задних колес (Рf1 и Рf2) прикладываются к середине пятна контакта колес с дорогой, направлены вдоль поверхности дороги против направления движения автомобиля и в сумме дают силу Рf . Сила сопротивления воздушной среды Pw направлена также против направления движения автомобиля.
Спроецировав все силы на ось, параллельную поверхности дороги, получим уравнение движения автомобиля на подъеме:
22

Pk Pf Ph Pw Pj 0, откуда Pk Pf Ph Pw Pj . |
(3.13) |
Тяговая сила Рк на ведущих колесах автомобиля ограничивается силой сцепления шин с поверхностью дороги; качение ведущих колес без буксования возможно при условии
Pk P Gсц a, |
(3.14) |
где Р – сила сцепления колес с опорной поверхностью;
Gсц – сцепной вес машины, приходящийся на ведущие колеса (для неполноприводных автомобилей и колесных тракторов Gсц определяется с учетом распределения нормальных реакций от веса машины по осям);
a – коэффициент сцепления ведущих колес с опорной поверхно-
стью.
Сила сцепления Р противодействует скольжению колес относительно дороги и зависит от силы трения, возникающей в месте контакта колеса с дорогой, от типа и состояния дороги, рисунка и степени износа протектора, давления воздуха в шине и т. д. У автомобилей коэффициент сцепления a колес автомобиля численно равен отношению горизонтальной реакции дороги Хk, вызывающей равномерное скольжение колеса, к нормальной реакции ZK, т. е. a = XK \ ZK.
Реакция ZK возникает под действием силы GK, а Хк – под действием силы Т. Коэффициент сцепления колесных и гусеничных движителей с дорогой г обычно определяют экспериментально, учитывая действие грунтозацепов:
P
г Gk , (3.15)
сц
где Рk –касательная сила тяги;
Gсц – сцепной вес транспортного средства.
Для гусеничных тракторов, полноприводных автомобилей и колесных тракторов сцепной вес Gсц равен эксплуатационному весу машины
GTp.
В общем случае движения машины на подъем (уклон) сцепной вес равен Gсц =Gа cos , где, – угол уклона пути движения.
23
3.6.Силовой баланс машины
Переписав уравнение движения машины в виде PK=Pf+Ph+Pw+Pj, получим уравнение силового баланса, которое можно решить графически. Для этого в системе координат Рк – Vа строится тяговая характеристика автомобиля (рис. 3.2).
PK |
PKI |
P = |
G |
|
|
|
|
a K |
|
|
|
PKII |
|
P + PW |
|
|
PK |
a |
|
|
|
|
||
|
|
PIII |
P |
|
PKIII=P +PW |
|
3 |
PW |
|
|
|
|||
|
|
|
|
|
|
|
P |
|
|
|
V0 |
V1 |
Vmax |
Va |
Рис. 3.2. Тяговая характеристика автомобиля
В нижней части графика строится зависимость Р = f(Va). При ус-
ловии, что коэффициент суммарного сопротивления дороги а не зависит от скорости движения, графическим изображением Р в функции скорости движения будет прямая линия, параллельная оси абсцисс.
3.7.Мощностной баланс автомобиля и трактора
Используя при анализе динамических свойств автомобиля сопоставление тяговой мощности NK с мощностью, затрачиваемой на все виды сопротивлений движению, можно записать уравнение баланса мощностей в следующем виде:
Ne тр Nk N f Nh Nw N j, |
(3.16) |
где Nе – эффективная мощность, развиваемая двигателем машины, кВт;тр - коэффициент полезного действия трансмиссии;
Nк – мощность, подведенная к колесу, кВт;
Nf – мощность, затрачиваемая на преодоление сопротивления качению, кВт;
24
Nh – мощность, затрачиваемая на преодоление сопротивления подъему, кВт;
Nw – мощность, затрачиваемая на преодоление сопротивления воздушной среды, кВт;
Nj – мощность, затрачиваемая на преодоление сопротивления разгону, кВт.
Уравнение баланса мощностей показывает распределение мощности, развиваемой двигателем и подведенной к ведущим колесам. Для преодоления различных дорожных сопротивлений затрачиваемая на преодоление сопротивления качению мощность (кВт) определяется:
N |
|
|
PfVa |
|
f G cos V |
|
||
f |
|
|
|
a a |
a |
, |
(3.17) |
|
|
|
|
||||||
|
1000 |
1000 |
|
|
|
|||
где Pf – сила сопротивления качению, Н; V – скорость движения, м/с.
Аналогично определяют и другие виды мощности: - мощность сопротивления подъему
Nh |
|
PhVa |
|
Ga sin Va |
|
GaiподVa |
; |
(3.18) |
|
|
|
||||||
|
1000 |
1000 |
1000 |
|
|
|||
- мощность сопротивления воздушной среды
N |
|
|
|
P V |
K |
FV3 |
|
|||
W |
|
|
W a |
|
|
W a a |
, |
(3.19) |
||
1000 |
1000 |
|||||||||
|
|
|
|
|
||||||
где Pw – сила сопротивления воздушной среды, Н; Fa – лобовая площадь автомобиля, м2;
Kw – коэффициент сопротивления воздуха, Н·с2/м4; - мощность сопротивления разгону
N |
|
|
PjVa |
G j |
V |
|
|||
j |
|
|
|
|
a a |
a a |
, |
(3.20) |
|
|
|
|
|||||||
|
1000 |
1000g |
|
||||||
где Pj – сила сопротивления разгону, Н; jа – ускорение автомобиля, м/с2;
δа – коэффициент учета вращающихся масс.
Эффективная мощность Ne, развиваемая двигателем и подводимая к ведущим колесам, уменьшается с учетом коэффициента полезного действия тр. Следовательно, мощность на ведущих колесах NK=Ne тр.
Баланс мощностей, представленный в виде графика (диаграмма движения автомобиля), позволяет определить возможность его движения с той
25

или иной скоростью по дороге с заданным сопротивлением качению и углом подъема.
Рис. 3.3. Мощностной баланс автомобиля
3.8. Влияние эксплуатационных факторов на топливную экономичность машины
Расход топлива на 100 км пробега в общем случае установившегося движения автомобиля может быть определен из следующего выражения:
G |
|
100 Gт |
, |
(3.21) |
|
||||
n |
|
Va |
|
|
где Gп - расход топлива на 100 км пути, кг/100км; Gт – часовой расход топлива, кг/ч ;
Vа - скорость движения автомобиля, км/ч.
Часовой расход топлива в килограммах определяется по формуле
G |
|
ge Ne |
|
(3.22) |
|
||||
т |
1000 , |
|||
где ge – удельный расход топлива, г/кВт∙ч;
Ne - эффективная мощность двигателя, кВт,
Следовательно, подставляя значение Gт в формулу (3.21), получим:
Gn |
ge |
Ne |
|
|
|
|
. |
(3.23) |
|
10 |
V |
|||
|
|
a |
|
|
26

Для определения влияния эксплуатационных факторов на топливную экономичность автомобиля вспомним, что эффективная мощность двигателя расходуется на преодоление мощностей сопротивлений:
Ne |
|
N Nw N j |
. |
(3.24) |
|
||||
|
|
тр |
|
|
Подставив значение эффективной мощности в формулу (3.23), учитывая плотность топлива рт в г/см3 и скорость в км/ч, получим Gn в л/ 100 км:
G |
ge N Nw N j . |
|||
n |
10 3.6 |
тр |
V |
p |
|
|
a |
T |
|
Подставив соответствующие значения мощностей N =P Nw = PwVa /1000; Nj = PjVa/1000, получим
(3.25)
Va /1000;
G |
ge (P P РJ ) |
(G K F V 2 |
|
G |
|
a |
j |
a |
) |
|
|
|
|
|
a |
|
|
. |
(3.26) |
||||||
36000 |
тр т |
|
g |
|
||||||||
п |
a a a a |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
При установившемся движении, когда jа = 0, уравнение примет вид
G |
п |
(G |
a |
f |
a |
K |
F V 2 |
G i |
под |
)/(3,6 104 |
тр |
|
Т |
) |
. (3.27) |
|
|
|
|
a a |
a |
|
|
|
Эта формула устанавливает зависимость расхода топлива на 100 км пробега автомобиля от нагрузочных, дорожных и скоростных условий, обтекаемости автомобиля и экономичности двигателя.
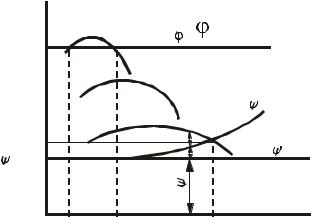
3.9.Управляемость колесной машины
Управляемостью колесной машины называется совокупность свойств конструкции, обеспечивающих сохранение ее движения по траектории, заданной управляемыми колесами. Управляемость колесной машины зависит в основном от кинематической связи между управляемыми колесами, осуществляемой рулевой трапецией, увода колес, стабилизации и колебаний управляемых колес.
27
3.10. Боковой увод и поворачиваемость машины
Пневматическая шина при сравнительно небольшом давлении внутри является эластичным элементом и не может воспринять поперечные силы, не меняя направления движения. Под действием поперечной силы Рб происходит боковая деформация шины, ее прогиб, при этом средняя плоскость колеса смещается на расстояние bш.
Рассмотрим поворот колес машины с учетом бокового увода шин
(рис. 3.4).
R
L
V2
2 |
V1 |
|
|
|
|
|
|
|
|
I |
|
|
R |
|
|
|
1 |
|
2 |
- |
|
1 |
|
 О1
О1
 - 1
- 1
О
Рис. 3.4. Схема бокового увода и поворачиваемости машины
Направление движения передней оси зависит от угла поворота управляемых колес, где угол поворота – средняя величина углов поворота колес. Под действием боковой силы в общем случае углы увода шин передних и задних колес имеют различную величину 1 и 2. Углы увода шин каждой оси можно считать одинаковыми. При повороте машины с жесткими колесами боковой увод отсутствует, и машина совершает поворот с радиусом R вокруг мгновенного центра поворота О.
Радиус поворота R = L/tg , где L – база автомобиля, м. При малых значениях угла поворота tg и R = L/ . Однако в результате увода шин движение передней и задней осей отклоняется от траекторий, по которым они двигались бы в случае отсутствия увода. Передняя ось машины будет двигаться вдоль вектора V1, направленного под углом – 1 к продольной
28

оси машины, а задняя ось – вдоль вектора v2, направленного к оси под углом 2. Мгновенный центр вращения машины переместится при этом в точку О1 лежащую на пересечении перпендикуляров к векторам скоростей V1 и V2, а радиус поворота становится равным R', определяемым по формуле
R |
|
L |
|
|
|
tg 1 |
tg 2 . |
(3.28) |
|||
|
Учитывая, что углы увода 1 и 2 незначительны (5 … 7°) и средний угол поворота а на больших скоростях также невелик, приближенно можно считать
R |
L |
|
|
|
|
|
|
|
|
. |
(3.29) |
||
|
1 |
|||||
|
|
|
2 |
|
|
|
Если углы увода передних и задних колес равны ( 1= 2), то боковой увод шин не оказывает значительного влияния на радиус поворота, и величина его не меняется, т. е. R = R', но смещается мгновенный центр поворота. Если 1> 2, то и R' >R при одновременном смещении центра вращения. Поворот будет осуществляться по более пологой кривой, чем при жестких колесах.
Свойство автомобиля с эластичными шинами отклоняться вследствие увода колес от направления движения, определяемого положением управляемых колес, называется поворачиваемостью. При равенстве R' = R и углов увода 1= 2 машина обладает нейтральной (нормальной) поворачиваемостью. При R'<R и 1< 2 машина имеет излишнюю поворачиваемость, а при R'>R и 1> 2 поворачиваемость автомобиля недостаточна.
3.11. Проходимость колесных и гусеничных машин. Требование к проходимости автомобиля
Способность автомобиля двигаться по плохим дорогам или в условиях бездорожья, а также преодолевать различные дорожные препятствия называется проходимостью. В зависимости от назначения автомобиля, сферы его применения и специфических условий работы требования, предъявляемые к его проходимости, должны дифференцироваться, так как они не могут быть одинаковыми для автомобилей всех типов. Для движения автомобиля по горизонтальной дороге необходимо, чтобы тяговое усилие на ведущих колесах Рк было бы больше силы сопротивления качению Pf и одновременно было бы меньше или равно силе сцепления шины с грунтом Р .
При движении в тяжелых дорожных условиях значения величин Рf и Р близки друг к другу, в связи с чем очень важно повысить силу сцепле-
29
ния Рф, которая зависит от поверхностного трения шины и сцепления грунтозацепов (выступов) протектора с грунтом, и уменьшить силу Pf, значение которой зависит в основном от степени деформации грунта шиной, что определяется значением удельного давления на грунт.
Уменьшение удельного давления на грунт в пределах контакта шины с дорогой можно достигнуть путем уменьшения внутреннего давления в шине, что способствует увеличению площади опорной поверхности, а также применением широкопрофильных или арочных шин с централизованной системой регулирования давления воздуха. Давление в таких шинах обычно регулируется на ходу с места водителя. Шины с регулируемым давлением воздуха целесообразно применять на автомобилях, предназначенных для работы в широком диапазоне изменения дорожных условий. Недостатком широкопрофильных шин является повышенная интенсивность изнашивания в зоне контакта и меньшая боковая устойчивость по сравнению со сдвоенными шинами. Применение арочных шин на ведущих колесах обычного автомобиля с колесной формулой 4 x 2 приравнивает его по проходимости и тяговым качествам к полноприводным автомобилям. Следует иметь в виду, что развитые грунтозацепы у некоторых моделей арочных шин вызывают сильную вибрацию ходовой части и узлов трансмиссии автомобиля при движении по дорогам с асфальтобетонным покрытием.
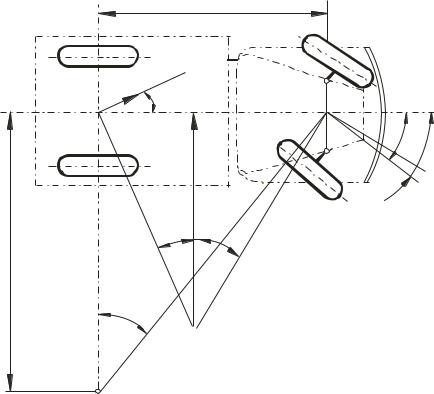
3.12. Геометрические параметры проходимости и маневренности колесных машин
Конструктивные особенности колесных машин, существенно влияющие на их проходимость в условиях плохих дорог или бездорожья, называются геометрическими параметрами проходимости.
К ним относятся (рис. 3.5): радиусы продольной Rnp и поперечной Rпоп проходимости, передний п и задний П углы проходимости, вертикальный дорожный просвет и показатели маневренности – ширина полосы движения на повороте и наименьший радиус Rmin.
Радиусы продольной и поперечной проходимости Rпр и Rnon показывают очертание препятствия, которое, не задевая, может преодолеть колесная машина. Величины радиусов соответствуют окружностям, проведенным касательно к колесам и низшим точкам в средней части автомобиля. Чем меньше Rпр и Rпоп, тем лучше проходимость машины.
Передний и задний углы проходимости п и п характеризуют проходимость машины в момент въезда на препятствие или съезда с него. Углы проходимости образуются опорной поверхностью и плоскостями, касательными к колесам.
30