

1_el-mash-spets-nazn-lab-rab
.pdfФ о р м а 3
Статическая ошибка сельсина-приемника в трансформаторном режиме
|
U1 = |
B |
|
|
|
|
|
|
|
θД, град |
Правое вращение |
Левое вращение |
||
|
θ′П, град |
∆θПР, град |
θ′П, град |
∆θЛЕВ, град |
|
|
|
|
|
-Вычислить погрешность ∆θm как среднее арифметическое значение максимальных положительной и отрицательной ошибок.
4.2.3.Основные характеристики
-Закрепить ротор датчика в нулевое положение.
-Изменять положение ротора приемника от нулевого синфазного
θ′П = 0 до 180° через 10°, записав точку θ′ = 90°.
-Измерять выходное напряжение приемника UВЫХ, угол рассогласования θ′, потребляемые датчиком ток I1Д и мощность Р1Д и заносить данные в таблицу по форме 4.
Ф о р м а 4
Основные характеристики сельсинов в трансформаторном режиме
|
U1Д = |
В |
|
|
|
|
|
|
|
θ′, град |
UВЫХ, В |
|
I1Д, А |
Р1Д, Вт |
|
|
|
|
|
- Построить зависимость UВЫХ = f(θ′) на графике 3.
Вид функции UВЫХ = f(θ′) показан на рис.6.4.
- Определить удельное выходное напряжение и удельную выходную мощность при угле рассогласования 10° по формулам :
UВЫХ УД= UВЫХ 10°/10; РВЫХ УД= РВЫХ 10°/10.
5.Краткие выводы
5.1.Индикаторный режим
-Определить класс точности сельсина-приемника в индикаторном режиме работы по величине погрешности ∆θm , учитывая следующую градацию по точности:
Класс точности |
30 |
45 |
60 |
90 |
Погрешность cледования, угл.мин. ± 30 |
± 45 |
± 60 |
± 90 |
|
-Привести значение удельного синхронизирующего момента.
5.2.Трансформаторный режим
-Определить класс точности сельсина-приемника в трансформаторном
режиме работы по величине погрешности ∆θm в соответствии с приводимой ниже шкалой:
Класс точности |
0,1 |
0,2 0,3 |
0,5 1 |
2 |
3 |
5 10 20 |
30 |
Погрешность следования, ±0,1 |
±0,2 ±0,3 |
±0,5 ±1 |
±2 |
±3 |
±5 ±10 ±20 |
±30 |
|
угл.мин: ' |
|
|
|
|
|
|
|
-Указать величину удельных выходных напряжения.
6.Литература: [2], c. 266…275.
∆θ
IА
IB
IС
UВЫХ |
R =∞ |
|
|
|
R = RНГ |
Р А Б О Т А 3
ВЕНТИЛЬНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
1. Цель работы
Целью работы является экспериментальное изучение рабочих свойств вентильного двигателя постоянного тока малой мощности и анализ его технико-экономических показателей.
2. Основные теоретические положения
Вентильный электродвигатель (ВД) представляет собой электромеханическую систему, состоящую из трёх функционально связанных узлов: собственно электрической машины (ЭМ), датчика положения ротора (ДПР) и полупроводникового коммутатора (ПК).
Конструктивно ЭМ выполняется по типу синхронной машины: секции якорной обмотки размещаются на статоре, индуктор – постоянный магнит – является частью её ротора и создает в воздушном зазоре поток возбуждения.
ДПР состоит из сигнального элемента (СЭ), жестко связанного с ротором ЭМ, и чувствительных элементов (ЧЭ), установленных на статоре. СЭ размещается в зоне установки ЧЭ и при вращении ротора ВД периодически бесконтактно воздействует на них энергией своего физического поля (магнитного, светового, электрического и т.п.) в зависимости от их типа.
ПК по сигналам, поступающим с СЭ на управляющие входы его полупроводниковых ключей (в ВД малой мощности – транзисторных), периодически подключает секции якорной обмотки к источнику питания – коммутирует секции. Из-за жесткой связи СЭ с ротором, а ЧЭ – со статором коммутация секций происходит в такой последовательности и в такие моменты времени, при которых направление магнитного поля индуктора, сохраняется неизменным при любом положении ротора относительно статора. Именно поэтому при взаимодействии магнитодвижущей силы (МДС) якорной обмотки с магнитным полем индуктора создается постоянный по знаку момент.
Таким образом, ДПР совместно с ПК выполняют функции коллекторнощеточного аппарата двигателя постоянного тока. Следствием этого является практическая идентичность характеристик ВД и коллекторных двигателей постоянного тока.
Электрическая энергия источника питания по пути преобразования в механическую проходит последовательно через два устройства: полупроводниковые ключи коммутатора и электрическую машину. Следовательно, повышение энергетических показателей ВД возможно только
при комплексном подходе, учитывающим особенности электрической машины и полупроводникового коммутатора.
Исследования показывают, что для достижения наилучших энергетических показателей необходимо, чтобы
|
|
|
|
∂ u(α) −∑ei |
(α) |
|
|
|
|
= 0 , |
(3.1) |
∂α |
|
||
|
|
|
|
где u(α) – напряжение питания ВД, ei(α) – ЭДС i-го источника,
α - текущее значение угла поворота ротора.
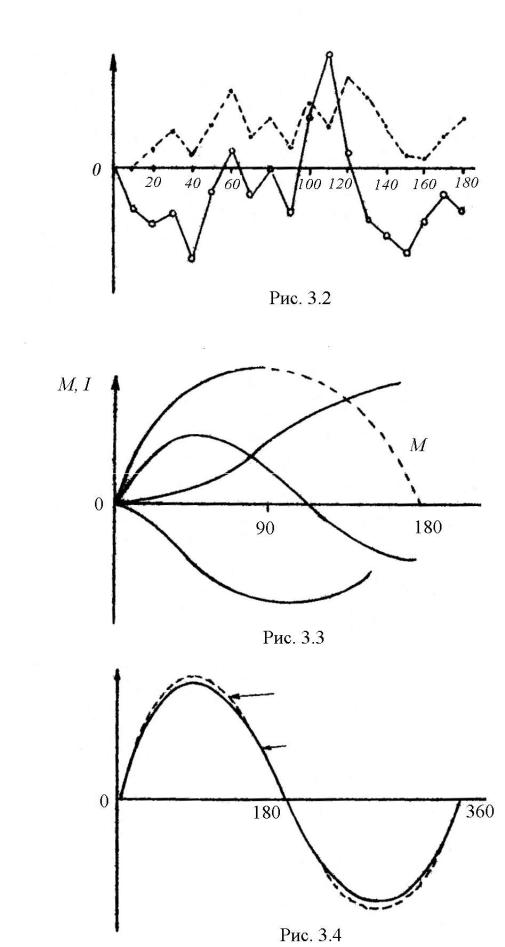
Выполнение этого условия ведет к снижению уровня гармонических составляющих в кривой ЭДС вращения на интервале коммутации, что уменьшает пульсации тока, а, следовательно, и потери мощности в секциях якорной обмотки. С другой стороны, это благоприятно сказывается на энергетике коммутатора, поскольку снижаются пульсации тока полупроводниковых ключей и рассеиваемая на них мощность оказывается минимальной.
Согласно написанному выше условию для постоянного напряжения питания ВД оптимальной является прямоугольная форма кривой суммарной ЭДС на интервале коммутации. Одним из возможных путей получения такой формы ЭДС является введение в цепь якорной обмотки источников вольтодобавки сфазированных с ЭДС вращения двигателя.
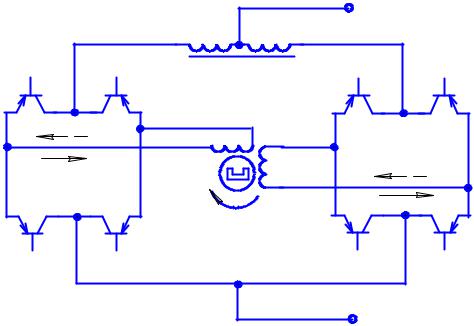
Принципиальная схема такого ВД с двухполупериодным (мостовым) коммутатором показана на рис.3.1. В качестве источника вольтодобавки здесь используется двухобмоточный дроссель L.
|
|
|
0 |
- |
|
|
|
|
+ |
- |
|
||
VT1 |
|
L |
|
|||
A |
VT3 |
VT5 Б |
VT7 |
|||
|
||||||
|
|
|
||||
|
|
i1 |
|
|
i |
|
|
|
|
|
|
2 |
|
VT2 |
VT4 |
|
VT6 |
VT8 |
||
B
+
Рис. 3.1
Уравнения для электромагнитного КПД и механической характеристики такого ВД могут быть представлены в виде:
|
|
|
|
|
|
PЭМ −PЭЛ |
|
|
1−kE |
|
kπ |
|
|
|||||
|
ηЭМ = |
|
= |
4 |
; |
(3.2) |
||||||||||||
|
|
PЭМ |
|
π |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
−1 |
|
||||||||
|
|
|
|
|
|
|
|
2kE |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M |
|
= |
|
4 |
C |
|
U |
− |
CE2 Ω |
k , |
|
|
|
(3.3) |
||||
CP |
|
|
E R |
|
|
|
|
|||||||||||
|
|
π |
|
R |
Я |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Я |
|
|
|
|
|
|
|
|
|
|
|
где коэффициент k учитывает влияние на указанные характеристики индуктивного сопротивления (индуктивности) дросселя и активного сопротивления обмотки якоря. Его величина равна
k = |
2 +π |
α2 Ω2 + |
1 |
+1, |
(3.4) |
|
2π |
α2 Ω2 |
|||||
|
|
|
|
где Ω - угловая частота вращения ротора; L – индуктивность дросселя;
RЯ – активное сопротивление обмотки якоря.
Коэффициенты
CE = |
E |
; kE = |
E |
; |
α = |
2 pL . |
|
|
|
Ω |
U |
|
|
||||||
|
|
|
|
RЯ |
|
|
|||
Для идеального |
ВД |
(L>>RЯ) α → |
2 +π |
и согласно уравнению (3.3) |
|||||
π |
|||||||||
|
|
|
|
|
|
|
|
||
механическая характеристика является линейной. В реальном ВД малой мощности величина RЯ значительна, а индуктивность дросселя имеет конечное значение. Поэтому, как видно из написанных уравнений, указанные параметры схемы ВД (L и RЯ) отрицательно влияют на величину КПД и искажают линейность механической характеристики.
В табл.3.1 представлены основные технико-эксплуатационные показатели ВД и аналогичных по мощности и частоте вращения коллекторных двигателей постоянного тока.

Т а б л и ц а 3.1
Параметры |
Единица |
|
|
Тип электродвигателя |
||
|
измерения |
СЛ-240С |
|
ДПР-72- |
3ДБ 50-16-4 |
|
|
|
|
М1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
коллекторный |
|
|
|
|
|
|
|
|
|
|
|
с |
|
с |
|
|
|
|
параллельным |
возбуждением |
бесконтактный |
||
|
|
возбуждением |
от |
|
||
|
|
|
|
|||
|
|
|
|
постоянного |
|
|
|
|
|
|
магнита |
|
|
|
|
|
|
|
|
|
Габариты |
мм |
70 х 149 |
|
40 х 89 |
76 х 50 х 40 |
|
диаметр, длина |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вес, G |
кг |
1,4 |
|
0,6 |
|
0,73 |
|
|
|
|
|
|
|
Напряжение |
В |
24 |
|
27 |
|
27 |
|
|
|
|
|
|
|
Частота |
об/мин |
3400 |
– |
4500 |
4000 |
|
вращения n |
4000 |
|
||||
|
|
|
|
|
|
|
Момент |
|
|
|
3,92 |
|
3,9 |
|
Н м |
4,9 10 |
|
|
||
Ток , IH |
А |
1,9 |
|
1,3 |
|
1,3 |
η |
% |
0,38 |
|
0,53 |
|
0,55 |
|
|
|
|
|
|
|
Ток, IП |
А |
- |
|
17,5 |
|
3,0 |
Время, T |
час |
2000 |
|
1000 |
30000 |
|
|
|
|
|
|
|
|
Объем VK |
см3 |
573 |
|
112 |
|
260 |
G/VK |
г/см3 |
2,44 |
|
5,55 |
|
3,0 |
P2H/Vk |
Вт/см3 |
0,031 |
|
0,165 |
0,06 |
|
Р2Н/G |
Вт/кг |
12,5 |
|
30,8 |
|
20,5 |
3. Описание схемы лабораторной установки
Схема лабораторной установки показана на рис.3.2. Вентильный двигатель имеет автономный блок питания, состоящий из индукционного регулятора (ИР) и двухтактного выпрямителя. Это позволяет регулировать напряжение питания ВД как со стороны сети переменного тока, так и со стороны постоянного тока.
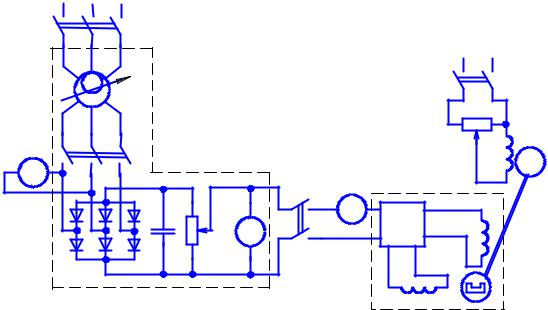
Контроль указанных напряжений осуществляется соответственно посредством вольтметров V1 и V2. Потребляемый двигателем ток измеряется амперметром А.
Нагрузка на валу ВД создается посредством индукционного тормоза (ИТ), ток возбуждения которого регулируется потенциометром R2.
S
ИР
S3
R2
S1 |
|
ИТ |
V1 |
|
|
S2 |
|
|
|
|
|
R1 |
A |
ПК |
V2 |
|
Блок питания
ВД
Рис.3.2
Поскольку мощность исследуемого двигателя невелика, диск индукционного тормоза в рабочем диапазоне частот вращения создает значительную вентиляторную нагрузку. Поэтому при расчете характеристик ВД этот тормозной момент должен быть учтен как соответствующая добавка МВб к величине момента М2, измеряемого по шкале индукционного тормоза, т.е.
М = М2 + МВб.
Момент, обусловленный вращением диска, является функцией частоты вращения и его геометрических размеров. Его значения в зависимости от указанных параметров представлены в табл.3.2.
Частота вращения вала двигателя измеряется милливольтметром (на схеме не показан), включенным на выход тахогенератора постоянного тока, встроенного в ВД.

Т а б л и ц а 3.2
Зависимость момента М от частоты вращения n
n, об/мин |
0 |
200 |
400 |
600 |
850 |
|
|
|
|
|
|
|
|
|
М× 10-3 Н м |
|
|
0 |
0 |
0,03 |
0,07 |
0,1 |
0,15 |
|
|
|
|
|
|
1000 |
0,2 |
0,27 |
0,36 |
0,48 |
0,56 |
|
|
|
|
|
|
2000 |
0,71 |
0,77 |
0,92 |
1,05 |
1,21 |
|
|
|
|
|
|
3000 |
1,46 |
1,6 |
1,8 |
2,1 |
2,3 |
|
|
|
|
|
|
4000 |
2,55 |
2,7 |
3,1 |
3,45 |
3,7 |
|
|
|
|
|
|
5000 |
4,1 |
- |
- |
- |
- |
|
|
|
|
|
|
4. Порядок выполнения работы
4.1.Пуск двигателя
-Включить выключатель S1.
-Установить с помощью индукционного регулятора (ИР) номинальное напряжение со стороны сети переменного тока. При этом движок потенциометра R2 должен находиться в положении, соответствующему минимуму напряжения со стороны постоянного тока.
-Включить выключатель S2.
-Установить с помощью потенциометра R1 номинальное напряжение питания двигателя.
4.2.Экспериментальное определение основных характеристик двигателя
-Измерить и записать в таблицу по форме 1 значения напряжения питания, потребляемого тока и частоты вращения при работе двигателя в режиме холостого хода.
Фо р м а 1
|
|
Опыт |
|
|
|
Расчет |
|
|
U, |
I, |
M +M |
Вб |
, |
n, |
|
ω |
η |
|
|
2 |
|
|
P1=U I, |
P2=M , |
|
|
B |
A |
Нм |
|
|
об/мин |
Вт |
Вт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- Включить выключатель S3 и подать питание на электромагнитный тормоз (ИТ). При этом движок потенциометра R2 должен стоять в
положении, соответствующему минимальному напряжению, подаваемому на обмотку возбуждения ИТ.
-Регулировать ток возбуждения ИТ и изменять тормозной момент на валу двигателя до величины М ≈ 1,2МН, сняв таким образом 4…6 точек. Значения I и n, соответствующие различным нагрузкам, заносить в таблицу по форме 1.
-Повторить опыт для напряжений U = 0,8UH, 0,6UH, 0,5UH , изменяя с помощью потенциометра R1 напряжение питания электродвигателя.
5.Обработка экспериментальных данных
5.1.Для каждого из значений напряжения питания рассчитайте потребляемую и полезную мощности, а также КПД.
5.2.На графике 1 постройте рабочие характеристики: P, I, M, n и η = f(P2) при U =UH= const. На основании этих данных определите основные параметры двигателя при номинальной мощности равной 16 Вт.
5.3.На графике 2 постройте семейство скоростных характеристик, т.е. зависимостей n=f(I) при U=const.
5.4.На графике 3 постройте семейство механических характеристик – зависимостей n=f(M) при U = const.
5.5.На графике 4 постройте зависимость η=f(U) при М = МН.
6. Содержание отчета
Отчет по лабораторной работе должен содержать:
-схему лабораторной установки;
-таблицу измеренных и вычисленных величин;
-необходимые графики;
-краткие выводы по работе, в том числе сравнительный анализ техникоэксплуатационных показателей электродвигателей представленных в табл. 3.1.
7.Литература : [3].