

Классы функций
Давайте вспомним, как мы определяли экстремум функции нескольких переменных
-

(2.5)
Здесь жирным шрифтом обозначен вектор аргументов x.
Определение 4. Точка x0 называется точкой минимума функции y(x), если эту точку x0 можно окружить некоторой малой d-окрестностью, в которой "x выполняется условие: y(x)іy(x0). Если при этом "x из этой d-окрестности, кроме x0, будет y(x)>y(x0), то говорят, что в точке x0 достигается строгий минимум. Аналогично даётся определение максимума (строгого максимума).
Хотелось бы таким же образом определить экстремум и для функционалов, но что такое d-окрестность функции? Для точки xОRn мы под d-окрестностью точки x0 понимаем n-мерный круг радиуса d с центром в точке x0.
Определение 5. d-окрестность точки x0 – это множество точек x, для которых
-

(2.6)
Здесь xi – координаты точки x, а x0i – координаты x0.
Правильнее было бы сказать так: мы вначале определили для точки xОRn норму, как квадратный корень из суммы квадратов координат, потом ввели понятие расстояния (норма разности), а затем уже определили d-окрестность точки x0 как такое множество точек, для которых их расстояние до x0 меньше d.
Попробуем пойти по этому же пути для функций. Функцию f(x) на [x1, x2] можно рассматривать как Ґ-мерный вектор: координатные оси – это значения xО[x1, x2], а сами значения координат – это значения функции f(x). Вместо суммы, участвующей в определении 5, мы должны записать интеграл. Тем самым мы определим некоторый класс функций.
Определение 6. Классом функций L2 на [x1, x2] называется множество функций, интегрируемых в квадрате на [x1, x2], для которых норма вычисляется:
-

(2.7)
Если возможны различные толкования, название класса проставляют в виде индекса внизу после определения нормы. Саму норму обозначают не одинарными вертикальными чёрточками, как модуль, а двойными. В определении 6 требуется, чтобы функция была интегрируемой в квадрате на [x1, x2], т.к. там вычисляется такой интеграл.
Используя определение 6, можно ввести понятие d-окрестности функции y0(x) на классе L2. Это такие функции y(x), для которых норма разности их от y0(x) меньше d:
-

(2.8)
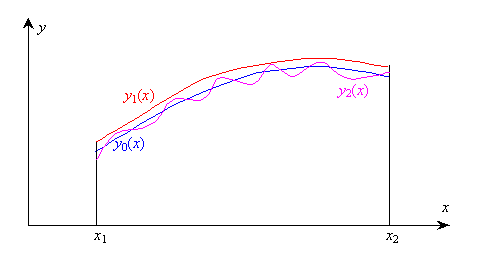
Посмотрите на рис. 2.4. Здесь нарисована исходная функция y0(x) и ещё две функции: y1(x) и y2(x).
|
|
|
Рис. 2.4. Нормы разности функций |

Функция y2(x) отличается от y0(x) значительно, но только на небольшом интервале. Наоборот, y1(x) отличается от y0(x) во всём интервале [x1, x2]. Площадь между y1(x) и y0(x) больше площади между y2(x) и y0(x). Поэтому, если вычислять по (2.8) расстояние (норму разности) между y1(x) и y0(x), с одной стороны, и y2(x) и y0(x) с другой, то окажется, что
-

(2.9)
Функция y1(x) находится дальше от y0(x), чем y2(x).
С классом функций L2 Вы имели дело в теории рядов Фурье. Там, в частности, доказывается, что из всех тригонометрических многочленов степени n наилучшее приближение к функции y(x) в смысле (2.8) имеет такой многочлен, коэффициенты которого совпадают с коэффициентами Фурье функции y(x). На этом далее строится доказательство сходимости рядов Фурье.
В вариационном исчислении класс L2 применяется редко. Здесь используются другие классы, которые мы сейчас и рассмотрим.
Определение 7. Классом функций C0 на [x1, x2] называется множество функций, непрерывных на [x1, x2], для которых норма вычисляется:
-

(2.10)
При таком определении нормы две функции y0(x) и y(x) считаются близкими, если максимум модуля их разности мал. Так, d-окрестность функции y0(x) на классе C0 - это такие функции y(x), для которых норма разности их от y0(x) меньше d:
-

(2.11)
Посмотрите ещё раз на рис.2.4. Здесь максимальная разность между y2(x) и y0(x) больше, чем между y1(x) и y0(x). Поэтому, если вычислять расстояние по (2.11), то
-

(2.12)
Функция y1(x) в смысле C0 находится ближе к y0(x), чем y2(x).
Определение 8. Близостью 0-го порядка называется близость в смысле C0.
В (2.11) y(x) близка к y0(x) в смысле близости 0-го порядка: норма их разности в C0 мала.
Определение 9. Классом функций C1 на [x1, x2] называется множество функций, дифференцируемых в [x1, x2], для которых норма вычисляется:
-

(2.13)
Близкими в C1 будут такие функции, которые и сами мало отличаются друг от друга, и производные их отличаются мало.
Определение 10. Близостью 1-го порядка называется близость в смысле C1.
|
|
|
Рис. 2.5. Близость в C0иC1 |
На рис.2.5 функции y1(x) и y2(x) мало отличаются от y0(x) по модулю. Значит, обе они близки к y0(x) в смысле близости 0-го порядка. Но функция y2(x) сильно отличается от y0(x) по значениям производной, а y1(x) - нет. Поэтому y1(x) будет близка к y0(x) в смысле близости 1-го порядка, а y2(x) - нет. Иными словами, множество функций, близких к данной в смысле близости 1-го порядка, является подмножеством множества функций, близких к данной в смысле близости 0-го порядка. Говорят, что класс C1 является подклассом класса C0. Отсюда следуют 2 важных вывода, которые мы будем далее использовать.
Вывод 1. Если какое-либо свойство выполняется для всех функций из C0, то оно тем более будет выполняться и для всех функций из вложенного в C0 класса C1.
Вывод 2. Если какая-либо функция принадлежит C1, то она тем более будет принадлежать и охватывающему C1 классу C0.
Так, на рис.2.5 y1(x) близка к y0(x) в смысле C1 (т.е. принадлежит к множеству функций, близких к y0(x) в смысле C1). Поэтому она будет также близка к y0(x) и в смысле C0. Здесь мы применяем вывод 2.2.
А вот обратная ситуация. Пусть мы показали, что какое-то свойство выполняется для всех функций, близких к y0(x) в смысле C0, т.е. и для y1(x), и для y2(x). Тогда в силу вывода 2.1 это свойство должно иметь место и для всех функций, близких к y0(x) в смысле C1, в частности, для y1(x).
Иногда норма в C1 вычисляется не по (2.13), а по формуле:
-

(2.14)
Нетрудно убедиться, что функции, близкие в смысле нормы (2.14), будут также близкими и в смысле (2.13), и наоборот.
Определение 11. Классом функций Ck на [x1, x2] называется множество функций, k раз дифференцируемых в [x1, x2], для которых норма вычисляется:
-

(2.15)
Иногда вместо (2.15) используют формулу, аналогичную (2.14): берут сумму максимумов модулей функции и её производных до k-го порядка включительно.
Близкими в Ck будут такие функции, которые и сами мало отличаются друг от друга, и их производные до k-го порядка включительно отличаются мало.
Определение 12. Близость в смысле Ck называется близостью k-го порядка.
Видно, что класс Ck+1 является подклассом класса Ck: в Ck+1 входят не все функции из Ck, а только та их часть, для которых ещё (k+1)-е производные отличаются мало. Классы C0, C1, ..., Ck вкладываются друг в друга.
Выводы 1 и 2, которые мы сделали для C0 и C1, можно обобщить.
Вывод 1'. Если какое-либо свойство выполняется для всех функций из Ck, то оно тем более будет выполняться и для всех функций из вложенного в Ck класса Ck+1.
Вывод 2'. Если какая-либо функция принадлежит Ck, то она тем более будет принадлежать и охватывающему Ck классу Ck-1.