1.1. Системи координат, що використовуються в фотограмметрії. Координатні системи місцевості. Координатні системи аерознімка.
В фотограмметрії координатні системи умовно можна розділити на дві групи, які розрізняються областю застосування, вибором початку координат і напрямком координатних осей.
Координатні системи місцевості використовуються для визначення просторового положення точок місцевості. До таких систем відносяться, як ліві геодезичні (геодезична «абсолютна», Гаусса-Крюгера, геоцентрична, місцева та інші), так і праві фотограмметричні.
В лівій (французькій) координатній системі послідовне перетворення осей X→Y→Z→X виконується шляхом їх обертання за годинниковою стрілкою; в правій (англійській) системі результату досягають при обертанні проти годинникової стрілки.
Система координат Гаусса-Крюгера OГXГYГZГ використовується для представлення результатів фотограмметричної обробки матеріалів аерознімання і положення для цього опорних точок в державній системі координат. Дана система відноситься до топоцентричних: її початок OГ суміщений з точкою перетину осьового меридіана зони і екватора, вісь OГZГ направлена по нормалі до еліпсоїда, а вісь OГYГ доповнює систему до лівої (рис. ).
Якщо задача фотограмметрії вирішується на незначних територіях, то використовують місцеву ліву просторову систему прямокутних координат. За вісь OX приймають горизонтальну лінію, яка паралельна до осьового меридіана; вісь OY направлена на схід, а вісь OZ перпендикулярна до рівневої поверхні, або до поверхні референц-еліпсоїда в точці початку координат (рис. ).
Фотограмметрична система координат OФXФYФZФ місцевості може вибиратись довільно. Вона застосовується для отримання формул зв’язку координат точок на знімку і на місцевості в такий спосіб щоб ці залежності мали найбільш простий вигляд. Її початок зазвичай суміщають з довільною точкою місцевості або центром проекції, а координатні осі вибирають так щоб система залишалась прямокутною і правою. В більшості випадків вісь OФXФ співпадає з напрямком маршруту (рис. ).
Якщо задачі фотограмметрії розв’язуються на великих територіях, при виконанні космічних досліджень і т.п. тоді використовують геоцентричну систему координат Oxyz. За математичну модель Землі приймається еліпсоїд, який характеризується великою a та малою b півосями, центр якого O співпадає з центром Земних мас, площина Oxy суміщена з площиною екватора, вісь Oz – з полярною віссю, т.б. з віссю обертання Землі. Вісь Oy доповнює систему до правої.
Координатні системи аерознімка
На аерознімку положення точок визначаються в прямокутних правих системах координат. Вони поділяються на внутрішні і зовнішні. Зовнішні координатні системи є просторовими, а їх початок суміщений з центром проектування. Внутрішні системи – плоскі з початком координат в точці перетину прямих, які з’єднують протилежні координатні мітки знімка: плоска прямокутна система координат Oxy, полярна система координат orφ (рис. ).
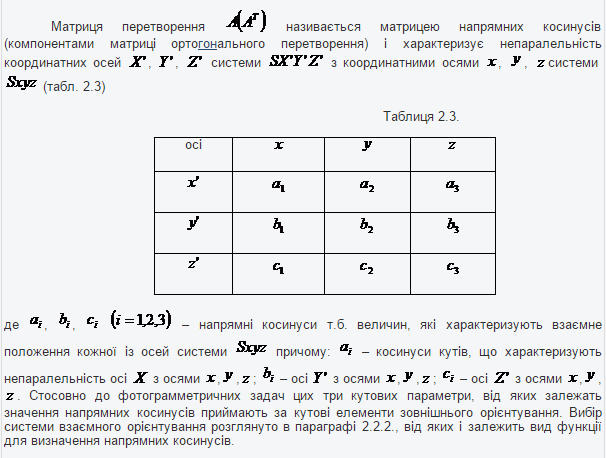
Допоміжна координатна система Sxyz відноситься до зовнішніх просторових і використовується для теоретичних досліджень. Її початок розмішений в центрі проекції S, вісь Sx і Sy є паралельними до відповідних осей координатної системи знімка oxy. В цій системі координатами точки аерофотознімка є величини x, y і z=-f (рис. ).
До допоміжних зовнішніх координатних систем знімка відноситься також система координат SX'Y'Z', вісі якої паралельні відповідним осям фотограмметричної системи координат місцевості OФXФYФZФ (рис. ).
1.2.1. Елементи внутрішнього орієнтування.
Елементи внутрішнього орієнтування визначають положення центра проекції S відносно координатної системи знімка o'xy, вираженої з допомогою координатних сіток. До них відносять три величини (рис. ): фокусну відстань f і координати головної точки xo, yo в координатній системі ox'y знімка. Ці елементи визначають в процесі калібрування знімальної камери і заносять їх в технічний паспорт. Головну точку знімка “o” отримують, як перетин площини знімка з перпендикуляром, опущеним з центра проекції S на цю площину. Головна точка “o” в координатній системі o'xy матиме координати xo, yo, а довжина перпендикуляра So є фокусною віддалю камери f.
У багатьох випадках вважають, що точки “o” та “o'” збігаються.
Знаючи елементи внутрішнього орієнтування, можна відтворити пучок проектуючи променів, які існували в момент знімання: для цього потрібно за координатними мітками і елементами xo, yo, f знайти положення центра проекції S. Після цього встановити в отриманий центр проекції джерело світла і спроектувати зображення знімка на будь-який екран (іншими словами – з’єднати центр проекції прямими лініями з точками знімка, позначивши в такий спосіб проектуючі промені).
Для фіксації системи координат на знімку служать координатні позначки 1, 2, 3, 4. При монтажі фотокамери стараються так розмістити ці позначки, щоб лінії 1-3 та 2-4 були взаємно перпендикулярні.
З іншого боку елементи внутрішнього орієнтування є ніщо інше, як компоненти вектора , проведеного з початку координат в центр проекції .
(2.1)
Завдання визначення елементів внутрішнього орієнтування в фотограмметрії називають калібруванням знімка. Якщо окрім елементів внутрішнього орієнтування визначити параметри дисторсії, то такий процес називають повним калібруванням знімка.
Елементами зовнішнього орієнтування (ЕЗО) – називають величини, які однозначно визначають положення площини аерознімка в момент фотографування відносно зовнішньої просторової прямокутної системи координат місцевості. Оскільки тіло в просторі має шість ступенів свободи, то знімок буде мати шість елементів зовнішнього орієнтування. З них: три лінійні і три кутові. Лінійні елементи визначають положення центра проекції в зовнішній системі координат місцевості. Якщо з початку системи координат місцевості провести вектор у центр проекції, то компоненти цього вектора і будуть лінійними елементами зовнішнього орієнтування (рис. ).
(2.2)
У фотограмметрії використовують дві системи ЕЗО, які розрізняються системами відліку.
Перша система елементів зовнішнього орієнтування представлена на рис. , де показана плоска координатна система знімка , допоміжні координатні системи: і . Їх координатні вісі паралельні до осей координатної системи місцевості та плоскої координатної системи знімка відповідно. ЕЗО в цій системі є шість величин – три лінійних і три кутових, при чому два кутових елементи пов’язані з площиною, що проходить через головну оптичну вісь і вісі допоміжної системи :
– координати центра проекції в системі координат місцевості ;
– повздовжній кут нахилу в площині між віссю (або надирним променем) і проекцією головного оптичного променя на площину ;
– поперечний кут нахилу в площині між головним оптичним променем і його проекцією на площину ;
– кут розвороту знімка між віссю і слідом перетину площини площини знімку (головною вертикаллю).
Дана система широко використовується в наукових дослідженнях при аналітичній і цифровій обробці знімків, в конструкціях фотограмметричних приладів. Якщо значення кутів і порівняно невеликі то в такому випадку допускають використання диференціальних формул зв’язку координат між точками знімка і місцевості.
Другу систему кутових елементів зовнішнього орієнтування знімка показано на рис. . Це кути , , :
– сумарний повздовжній кут нахилу в площині головного вертикала між віссю (надир ний промінь) і головним оптичним променем ;
– дирекцій ний кут оптичної вісі знімальної камери в площині між віссю і проекцією головної вертикалі (кут напряму знімання);
– кут розвороту знімка в його площині між віссю і головною вертикаллю .
Таким чином, аерознімок має дев’ять елементів орієнтування – три ЕВО і шість ЕЗО. З шести елементів зовнішнього орієнтування три – лінійні та три – кутові. При тому елементи і або і фіксують напрямок головного оптичного променя, а поворот знімка навколо головного променя.
Знаючи ЕВО і ЕЗО можна відтворити зв'язку променів, який існував в момент знімання, встановити його так, що він займе те саме положення, яке займав у момент фотографування.