

3 Розробка технічного завдання на пристрій
Розробити робота на базі мікроконтролера ATMega8 з можливістю керування електродвигунами за допомогою програми.
За допомогою фотодатчику реалізувати можливість руху роботу по прямій та кривій лініям. За допомогою програми реалізувати поворот робота на деякий кут.
Вся інформація, що записується до внутрішньої пам’яті пристрою повинна зберігатися в ньому після вимкнення живлення, при чому схема повинна гарантувати повне збереження всієї інформації навіть у випадку непередбаченого вимкнення живлення.
Забезпечити виявлення ліній пересічення. При русі робота по лінії можлива поява пересічення ліній. У такому випадку робот повинен призупинитися на цій лінії. Також за допомогою вбудованого динаміку робот повинен видати звуковий сигнал, при чому якщо пересічень декілька, то кількість звукових сигналів буде змінюватися лінійно.
4 Розробка функціональної схеми пристрою
Робот базується на одному мікроконтролері ATMega та драйвері двигунів L293D. Функціональна схема пристрою зображена на рисунку 4.1.
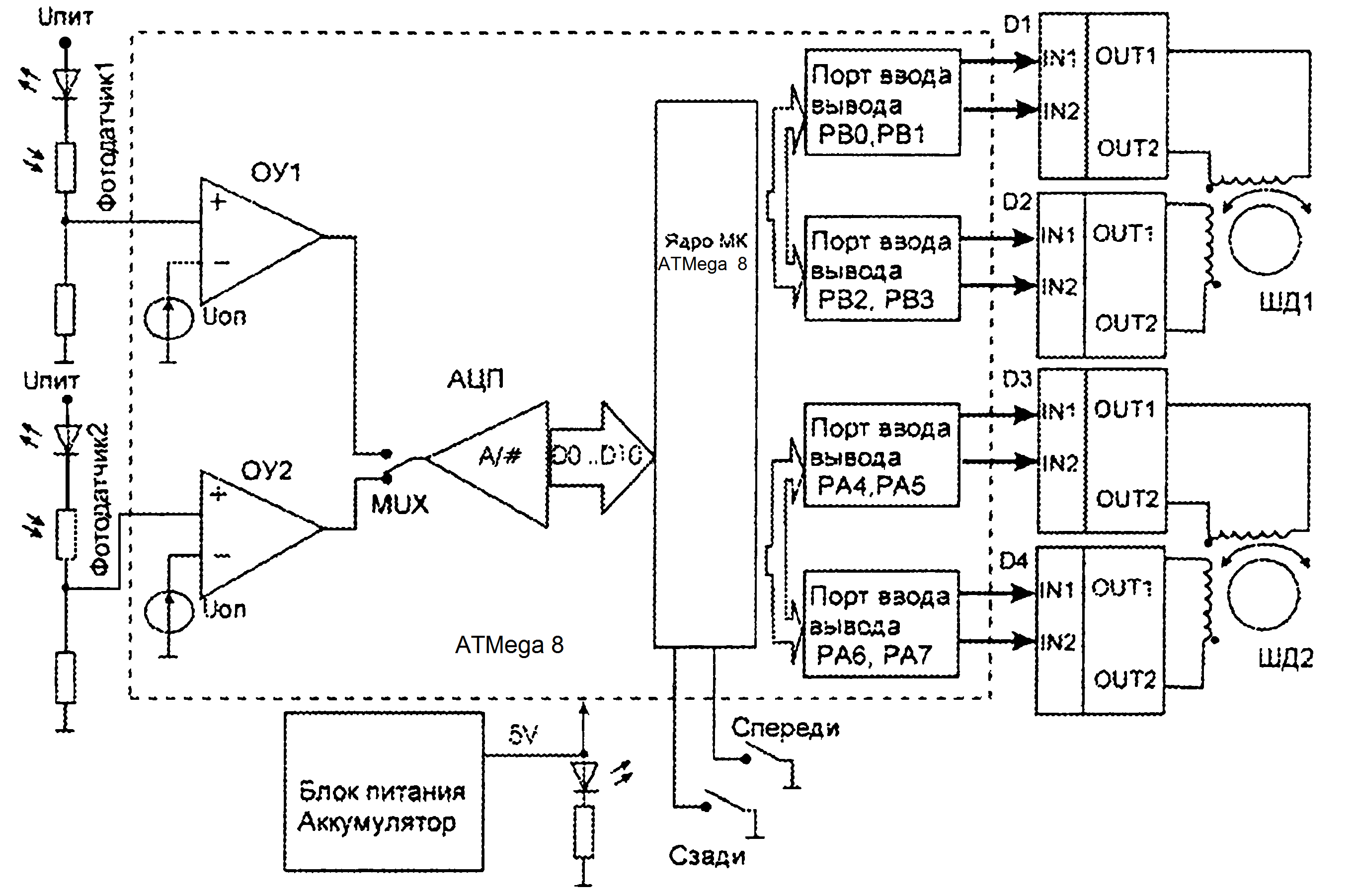
Рисунок 4.1- Функціональна схема пристрою
Фотодатчик 1 та фотодатчик 2 складаються з двох частин: світло діод, що є джерелом світла і самого фото транзистора, який сприймає відбите світло. Якщо поверхня світла, то відбитого світла достатньо для відкриття фототранзистори, в іншому випадку фототранзистори буде закрито (не буде пропускати струм).
Використання фототранзистора обумовлено тим, що швидкість його спрацьовування висока і достатня навіть при дуже швидкому русі робота. Використання фотодіодів також є недопустимим. Фоторезистори мають невисоку швидкість спрацьовування, і її може бути недостатньо при високій швидкості руху робота. Світлодіод і фото транзистор розділені перешкодою, щоб світло від джерела не потрапляло на фото транзистор та не спричиняло завад.
На фотодатчик 1 і фотодатчик 2 потрапляє світло,відбите від поверхні під деяким кутом (кути відбивання різних за кольором поверхонь - різні), а операційні підсилювачі ОУ1 і ОУ2 підсилюють сигнал з фотодатчика та передають його до АЦП. АЦПв свою чергу перетворює сигнал з фотодатчика на цифрові десятирозрядний дані D0-D10. Дані з обох датчиків обробляються в ядрі мікроконтроллера ATMega 8. Їх рівні порівнюються за допомогою логічних і арифметичних дій, і залежно від результату порівняння приймається рішення про напрямок руху всієї конструкції робота.
Крім того, на вирішення схеми управління впливає замикання контактів перешкоди, встановлених ззаду і спереду конструкції. Якщо робот натрапив на перешкоду, то він повинен від'їхати назад і повернути на деякий кут наліво або на право, залежно від програми, щоб об'їхати перешкоду. Схема управління через порти А і В подає код у драйвери обмоток D1-D4, які можуть комутувати струм через обмотку в обох напрямках. Драйвер побудований на базі контролера L293D.
По мірі протікання струму в обмотках збудження виникає обертаюче магнітне поле. Вал ШД1 і ШД2, у свою чергу, обертається згідно послідовності збудження магнітного поля. При подачі певної послідовності коду ШД1 і ШД2 обертаються, і конструкція рухається прямо або повертає вбік.