

6.2 Драйверы для ipm
Для управления современными силовыми ключами IPM необходимы схемы управления затворами ключей – драйверы. К ним предъявляются следующие требования:
– напряжение затвора при отпирании должно быть на 10…15 В выше напряжения стока MOSFET (коллектора IGBT), то есть для транзистора верхнего плеча напряжение управления должно быть на 10…15 В выше напряжения питания;
– драйвер должен управляться логическим сигналом, связанным с сигнальной шиной общего провода, соответственно драйвер верх-него плеча должен иметь высоковольтный каскад сдвига уровня;
– мощность, рассеиваемая схемой управления, должна быть пренебрежимо малой по сравнению с общей мощностью рассеяния;
– схема управления должна обеспечивать токи перезаряда цепи
затвора, гарантирующие динамические характеристики транзистора;
– время включения ton и выключения toff микросхем должно составляет 25…120 нс и 15…80 нс соответственно, что обеспечивает работу драйверов в диапазоне частот до сотен килогерц;
Основными особенностями драйверов должны быть:
– высокая стойкость к переходным перенапряжениям dU/dt (до 75 кВ /мкс);
– возможность регулирования времени задержки переключения tdt, уровня напряжения срабатывания защиты DESAT, сопротивлений цепи затвора Rg.on/off;
– встроенные изолированные источники питания;
– возможность подключения волоконно-оптической линии связи;
– уровень входного сигнала TTL/CMOS;
– встроенный изолированный DC/DC-конвертор;
– режим SSD;
– двуполярный сигнал управления затвором Ug.on/off = 15/–8 B;
– формирование времени задержки переключения транзисторов полумоста tdt;
– нормирование фронтов входных сигналов.
Особенности и принципы действия драйверов рассмотрим на примере структурной схемы полумостового драйвера устройства управления IPM (рис. 6.3). Рассматриваемый драйвер обладает следующими особенностями:
– высокой стойкостью к наведенному dU/dt (до 75 кВ/мкс), благодаря использованию импульсных трансформаторов;
– низким уровнем помех, наводимых в схеме управления, благодаря использованию импульсных трансформаторов и импульсных фильтров;
– высоким напряжением изоляции (до 4 кВ);
– высоким выходным током (до 30 А);
– возможностью регулирования времени задержки переключе-
ния tdt, уровня напряжения срабатывания защиты DESAT, сопротивлений цепи затвора Rg.on/off;
– запоминанием сигналов неисправности;
– встроенными изолированными источниками питания;
– возможностью подключения волоконно-оптической линии связи;
– уровнем входных сигналов TTL/CMOS.
Драйверы интеллектуальных модулей выполняют все функции, необходимые для безопасной работы модуля, производя постоянный мониторинг выходного тока, напряжения силовой шины питания и температуры модуля. Они имеют аналоговые выходы, сигналы на которых пропорциональны току, температуре модуля и напряжению силовой шины питания. Эти сигналы поступают на управляющий процессор, и могут быть использованы для анализа состояния системы. Для гальванической развязки входных цепей в драйверах используются импульсные трансформаторы. Напряжение изоляции конкретного модуля зависит от предельного рабочего напряжения. Встроенная схема формирования времени задержки переключения (формирователь tdt) исключает одновременное открывание транзисторов полумоста, и блокирует переключение полумоста на время tdt, необходимое для окончания переходных процессов и исключения сквозного тока. Это время зависит от конкретного типа примененных силовых кристаллов, и может регулироваться внешним резистором. Импульсные фильтры вместе с импульсными изолирующими трансформаторами выполняют еще одну очень важную функцию. Высокие скорости переключения и большие значения наведенного перенапряжения dU/dt могут приводить к сбоям в работе контроллера. Такая ситуация часто наблюдается при использовании оптической гальванической развязки, так как оптический барьер имеет сравнительно большую переходную емкость, через которую пики напряжения могут проникать в схему управления. Импульсные трансформаторы гораздо менее чувствительны к шумам, чем оптопары, а импульсные фильтры драйверов подавляют шумовые сигналы, как в прямом направлении, так и в обратном, не позволяя пикам наведенного напряжения воздействовать на работу управляющих контроллеров. В изолированных источниках питания, встроенных в драйверы, также используются импульсные трансформаторы с низким значением проходной емкости для уменьшения уровня переходных помех. Следует отметить также, что импульсные трансформаторы по сравнению с оптопарами имеют гораздо более высокую стабильность параметров при работе в условиях, высоких перепадов напряжения. Структурная схема драйвера тормозного транзистора (чоппера) модуля IPM приведена на рис. 6.4. В режиме динамического торможения двигателя двухпозиционный контроллер с гистерезисной характеристикой регулирования вырабатывает сигналы включения и выключения тормозного транзистора в зависимости от напряжения на шине питания. Минимальное время нахождения тормозного транзистора во включенном режиме – 30 мкс. Значения напряжений, при которых происходит коммутация тормозного транзистора, приведены на рисунке. Модуль имеет внешний вход управления чоппером, который может использоваться, например, для разряда накопительных конденсаторов. Приоритет имеет встроенная автоколебательная схема управления тормозным каскадом, максимальная частота коммутации – 5 кГц. Драйвер управления чоппером осуществляет описанные выше защитные функции, кроме того, он имеет функцию защиты от перенапряжений в цепи питания 15 В. Включение чоппера возможно, если защелка схемы защиты не сработала. При срабатывании защиты выход ERROR (открытый коллектор оптопары) имеет высокий логический уровень. Для сброса схемы защелки необходимо отсутствие любой неисправности и наличие сигнала сброса RESET в течение не менее 300 мс. Защелка сбрасывается также и при отключении питания. Для питания драйвера служит встроенный DC/DC-конвертор, питающийся от нестабилизированного напряжения 24 В (20…30 В) или стабилизированного 15 В. При наличии на входе RESET логической единицы конвертор отключается.
Поскольку драйверы предназначены для управления ключами силовых преобразователей переменного и постоянного тока различного схемного построения, то и они изготавливаются для управления одиночным ключом верхнего и нижнего плеча преобразователя, полумостовые и трехфазные мостовые драйверы. Как правило, на входе в драйвер устанавливается триггер Шмидта, осуществляющий нормирование фронтов входных сигналов и имеющий ширину гистерезиса, примерно равную 10% от напряжения питания Udd, рис. 6.5. Полумостовые драйверы могут иметь независимые входы верхнего и нижнего плеча или запрещать одновременное включение обоих транзисторов полумоста. Как правило, такие микросхемы формируют время задержки переключения (tdt), необходимое для исключения сквозных то-ков. Время tdt может быть фиксированным или задаваться с помощью
внешних элементов. Время задержки включения/выключения для каналов драйвера должно быть согласовано, уровень согласования ука-зывается в технических характеристиках. Ряд микросхем имеет вход стробирования SD, предназначенный для отключения выходных сигналов. После триггера Шмидта входные сигналы поступают на трансляторы уровня. Эти узлы, имеющие высокую помехозащищенность, позволяют согласовать логический сигнал, связанный с сигнальным общим проводом, с силовой минусовой шиной питания. Трансляторы уровня также содержат импульсный фильтр, не пропускающий сигналы с длительностью менее 50 нс. Каскад сдвига уровня предназначен для передачи логического сигнала схеме управления транзистором верхнего плеча. Микросхемы должны быть рассчитанные на перепад напряжения от –5 до 600 и 1200 В. Каскад сдвига уровня содержит генератор, вырабатывающий узкие импульсы, совпадающие с фронтами входного логического сигнала, дискриминатор импульсов и триггер-защелку (RS), формирующий сигнал управления выходным каскадом. Такая схема позволяет резко снизить ток потребления верхнего каскада драйвера. Дискриминатор требуется для повышения устойчивости драйвера к воздействию переходных перенапряжений dU/dt, возникающих из-за больших скоростей переключения. Благодаря наличию дискриминатора драйверы способны устойчиво работать при значениях dU/dt до 50 В/нc. При более высоких скоростях может произойти защелкивание драйвера – это одна из самых серьезных проблем, присущих высоковольтным схемам управления, не имеющим гальванической развязки. Поскольку для надежного открывания транзистора верхнего плеча напряжение питания верхнего каскада драйвера должно быть выше шины питания, как минимум, на величину UVLO, обычно для питания верхних каскадов драйверов применяют изолированные источники. Важным для драйверов является чрезвычайно малое собственное потребление тока. Тогда для его питания могут использоваться бутстрепные емкости, номинал которой зависит от характеристик затвора транзистора и максимальной требуемой длительности импульса управления. Они обеспечивают необходимый ток перезаряда емкостей затвора управляемого транзистора. Это допустимо только в импульсном режиме работы. Заряд бутстрепной емкости Сboot происходит через диод VD от низковольтного источника питания Ucc, когда закрывается транзистор верхнего плеча полумоста и выход полумоста (вывод US драйвера) оказывается (при индуктив-ной нагрузке) ниже потенциала силового общего провода на величину напряжения отпирания диода. Смещение вывода Us относительно вывода СОМ допускается на минус 5 В. Бутстрепный диод должен быть высоковольтным, его обратное напряжение определяется напряжением питания силовой шины. Кроме того, для нормальной работы в режиме ШИМ он должен быть быстродействующим, иметь малый ток утечки и обратного восстановления. Выходные каскады должны обеспечить ток включения/выключения MOSFET затвора в диапазоне 0,12…2 А, хватает для управления транзисторами и IGBT с током кол-лектора до 50 А. В схемах высоковольтных драйверов присутствуют паразитные биполярные двухколлекторые транзисторы, связанные с активными КМОП-транзисторами и их внутренними диодами, которые формируют триггерную структуру, приводящую к защелкиванию. Повышение стойкости к защелкиванию (latch immunity) и наведенному перенапряжению (dU/dt immunity) достигается применением защита от защелкивания (Lutch-Up Protected). Наиболее опасными с точки зрения защелкивания являются режимы короткого замывания SC или перегрузки по току OC, при которых значение dI/dt, а соответственно, и dU/dt, максимальны.
В качестве примера рассмотрим работу драйвера, структурная схема которого (МС33153) приведена на рис. 6.6. Особенностью данного драйвера является возможность использования двух способов защиты (по току и напряжению насыщения) и разделение режима перегрузки ОС и режима короткого замыкания SC. Вывод SENSE предназначен для подключения токового измерительного резистора, являющийся входом двух компараторов — с напряжением срабатывания 65 и 130 мВ. Таким образом, в драйвере анализируется состояние перегрузки и короткого замыкания. При перегрузке срабатывает компаратор ОС, и отключает сигнал управления затвором. При этом сигнал неисправности на вывод Fault-Output не подается. Если ток превышает заданный в два раза, это расценивается как короткое замыкание. При этом опрокидывается компаратор SC, и на контрольном выводе появляется сигнал высокого уровня. По этому сигналу контроллер, управляющий работой схемы, должен произвести отключение всей схемы. Сброс защиты производится при подаче запирающего сигнала высокого уровня, так как вход Input инвертирующий. Время повторного включения должно определяться тепловой постоянной времени силовых транзисторов. Вывод DESAT предназначен для реализации защиты по напряжению насыщения. Напряжение срабатывания по этому входу – 6,5 В..
Этот
же вход используется для подключения
конденсатора Cblank,
формирующего время задержки срабатывания
защиты.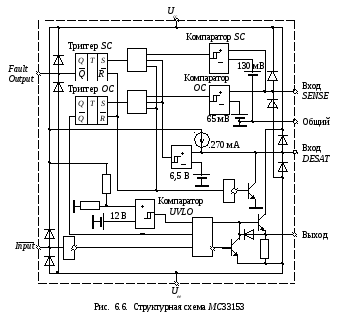 Такая задержка
необходима, поскольку после подачи
отпирающего напряжения на затвор на
транзисторе некоторое время, пока идет
восстановление оппозитного диода,
поддерживается высокое напряжение.
Такая задержка
необходима, поскольку после подачи
отпирающего напряжения на затвор на
транзисторе некоторое время, пока идет
восстановление оппозитного диода,
поддерживается высокое напряжение.