

Теория механизмов и машин. Мет. указ. к РГР
.pdf1. Вычисляем аналог скорости точки B кривошипа, B AB . В выбранном масштабе на плане проводится вектор pb перпендикулярно AB в сторо-
ну вращения кривошипа.
2. Составляется система уравнений для структурной группы 2-3
D2 B D2B ,
где D2 || BE, D2 B BE ;
Проводим через полюс (абсолютное движение, которое мы видим) линию, параллельную звену BE (вдоль этой линии движется точка D2), а через известную точку b (относительное движение) – линию, перпендикулярную звену BE (точка D2 движется вокруг точки В). Пересечение точек дает точку d2.
3.Аналог скорости точки E находится из отношения описанного выше в примере 2.
4.Уравнения для структурной группы 4-5 (группа с одной крайней по-
ступательной |
|
парой) для определения аналога скорости точки F: |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F E |
FE , где FE FE , F || y y . |
||||||||||
Проводим через полюс (абсолютное движение, которое мы видим) линию, параллельную направляющей F (в данном случае, параллельную вертикали уу), а через известную точку e (относительное движение) – линию, перпендикулярную звену EF. Пересечение линий дает точку f.
Построенный план аналогов является основой дальнейших расчетов. Аналоги скоростей любых других точек звеньев теперь можно найти из подобия, аналоги угловых скоростей вычисляются по найденным аналогам скоростей звеньев. Например, аналог угловой скорости звена 4 (звена EF):4 EF FE / FE , так как поворот звена 4 определяется вектором
FE , равным FT 4 FE .
3.3.Определения крайних положений. После построения всех планов аналогов определяются крайние положения. В некоторых механизмах крайние положения выходного звена определяются достаточно легко (например, в аксиальном кривошипно-ползунном механизме). В сложных механизмах можно воспользоваться следующим методом. Углы поворота входного звена
для крайних положений определяются по формуле |
|
45 |
|
|
x |
|
|
y |
, |
|||
1 2 |
|
|
||||||||||
|
|
|
|
|
1 |
2 |
||||||
где |
|
2 |
- аналоги скоростей выходного звена, для двух выбранных поло- |
|||||||||
|
1, |
|
|
|
|
|
|
|
|
|
|
|
жений, в которых аналог скорости меняет знак, а x, y - углы, которые следу-
ет отложить от 1 или 2 положения входного звена соответственно. Так как формула приблизительная, то не всегда найденные положения будут являть-
11
ся крайними. В этом случае крайние положения определяются методом подбора в ограниченной области около найденных положений.
Необходимо вычертить механизм в крайних положениях. Для этих положений строятся планы аналогов скоростей, и проверяется, попадает ли при построении точка, принадлежащая выходному звену, в полюс. Действительно, в крайних положениях выходное звено останавливается, чтобы изменить направление своего движения на противоположное.
Если точка, принадлежащая выходному звену, не попадает в полюс, необходимо проверить расчеты, и если они верны, повторить процедуру поиска крайнего положения описанным выше методом.
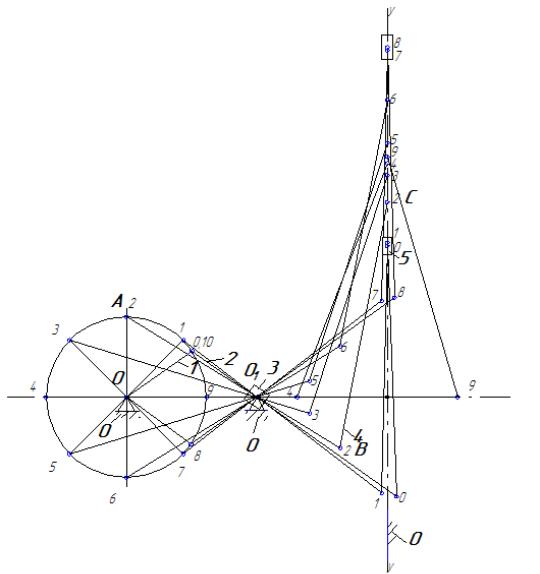
После построений одно из крайних положений назначается нулевым. Остальные положения нумеруются по порядку в сторону вращения начального звена (по 1). Необходимо следить, чтобы все точки получили смену нумерации.
Рис. 5. Полный план положений механизма
Угол поворота, на котором звенья движутся от нулевого крайнего поло-
12
жения к другому крайнему положению, будет углом рабочего хода. Угол, на котором звенья движутся от этого крайнего положения обратно к нулевому положению, будет углом холостого хода. Данные углы отмечаются на плане положений механизма.
Желательно крайние положения выделить цветными карандашами, одно из положений рабочего или холостого хода вычертить жирными линиями, остальные – тонкими. Обозначить все звенья, кинематические пары, обобщенную координату, направление вращения, углы рабочего и холостого хода и т.д. – на выделенном жирно положении.
Впримере на рис.5 построено 10 положений: 8 через 45о – 1,2,3,4,5,6,7,9
и2 крайних – 0-е и 8-е.
3.4. Анализ полученных результатов
На плане положений механизма необходимо определить перемещения выходного звена и построить график перемещений S( 1) . Перемещения
следует измерить от нулевой крайней точки с учетом масштаба и полученные данные занести в табл. 1. На планах аналогов скоростей измеряем от полюса вектор аналога скорости выходного звена для каждого положения с учетом масштаба, и данные заносим в табл. 1. Например, на рис.4б измеряем длину вектора pV f, и умножаем на масштаб . По данным табл.1 строим
графики зависимости S( 1) и V ( 1) , на которых по оси абсцисс откладыва-
ем угол поворота начального звена от нулевого положения в выбранном масштабе .
Таблица 1
Параметр |
|
|
|
|
Положение механизма |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||||
|
|
|
||||||||||||
Угол поворота |
|
|
|
|
|
|
|
|
|
|
|
|||
начального |
0 |
10 |
55 |
100 |
145 |
190 |
235 |
280 |
289 |
325 |
360 |
|||
звена, |
|
|||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
на чер- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
теже, |
0 |
3,2 |
43,8 |
71 |
82,5 |
103 |
145,8 |
195,2 |
198,2 |
89,3 |
0 |
|
Перемещение |
|
мм |
|
|
|
|
|
|
|
|
|
|
|
|
истинное, |
0 |
0.003 |
0.044 |
0.071 |
0.083 |
0.103 |
0.146 |
0.195 |
0.198 |
0.089 |
0 |
|||
|
||||||||||||||
|
|
м |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
на чер- |
|
|
|
|
|
|
|
|
|
|
|
|
Аналог ско- |
|
теже, |
0 |
32,7 |
49,8 |
20,1 |
95,2 |
39,9 |
66,9 |
36,2 |
0 |
320 |
0 |
|
|
мм |
|
|
|
|
|
|
|
|
|
|
|
||
рости |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
истинное, |
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
0.033 |
0.05 |
0.02 |
0.095 |
0.04 |
0.067 |
0.036 |
0 |
0.32 |
0 |
|||
|
|
м |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В механизме, в котором второй структурной группой будет одна из групп I, III, V, VI, IX, X определяется зависимость угла поворота выходного звена
13
5 ( 1) и зависимость угловой скорости выходного звена 5 ( 1), поскольку все точки этого звена движутся по замкнутой кривой второго порядка, и их линейная скорость в общем случае будет отлична от нуля. В крайних положениях в этом случае нулю будет равна угловая скорость звена. Следовательно, в крайних положениях нулю будет равен вектор относительной скорости одной точки звена относительно другой точки этого же звена (радиус вращения всегда отличен от нуля). Таким образом, в крайних положениях в этом случае звено совершает поступательное движение, абсолютные скорости всех точек звена равны, и на плане аналогов скоростей они совпадают. Например, для механизма на рис. 4 в крайнем для звена BE положении будут совпадать точки b, d и e.
Затем следует выполнить на ЭВМ дифференцирование зависимости перемещений от угла поворота S( 1) и полученные данные нанести на график
V ( 1) ( 5 ( 1) и нанести на график 5 ( 1)). Для этого на серединах интер-
валов, соответствующих повороту начального звена от одного положения к другому, откладываем значения производной и по полученным точкам строим график. Дифференцирование можно выполнить и графическим способом, изложенным, например, в [1]. А можно поступить следующим образом [2]. На каждом из интервалов (0-1, 1-2, и т.д.) на графике S( 1) необходимо определить отрезок, соединяющий точки кривой на концах интервала и на графике V ( 1) на этом же интервале отложить параллельный отрезок. На
графике V ( 1) построения начинаются из начала координат, а каждый сле-
дующий отрезок откладывается из конца предыдущего. Графики при верно найденных перемещениях, правильно построенных планах аналогов скоростей и соответствующем выборе масштаба должны практически совпадать.
Основным критерием правильности построений является равенство площадей фигур на графике V ( 1) над осью абсцисс и под ней, поскольку дан-
ные площади численно равны максимальному перемещению точки выходного звена (углу поворота звена) на рабочем и холостом ходу.
Иногда даже значительные отличия в графиках не указывают на неверность построений. В этом случае необходимо проконсультироваться с преподавателем.
В данной работе кроме выполненных построений и расчетов необходимо определить аналоги относительных скоростей звеньев, их центров масс и их угловую скорость.
Для нахождения аналогов относительных скоростей звеньев необходимо на планах измерить вектор, соединяющий точки, принадлежащие звену, скорость которого нужно определить. Например, для звена BE это будет вектор be на плане аналогов (рис. 4б). Отношение V НИ  НИ будет аналогом угловой скорости звена НИ.
НИ будет аналогом угловой скорости звена НИ.
14

Для того чтобы определить аналоги скоростей центров масс звеньев предварительно необходимо определить центры масс каждого звена. Центр масс шатуна находится на середине его длины, кулисы и кривошипа – в центре вращения, для ползунов и кулисных камней центр масс находится в точке присоединения к ним другого звена (во вращательной паре). Аналоги скоростей центров масс находятся по планам аналогов в точках соответствующих расположению центров масс самих звеньев. Для этого следует провести вектор в найденные точки из полюса и измерить его длину.
Определив перечисленные выше параметры, заносим их в таблицу 2. В случае разбираемого примера, данные таблицы будут выглядеть следующим образом.
2Таблица |
-углоАналоги скоростейвых |
звеньев |
ω |
0.380.341 |
0.30.111 |
0.180.271 |
0.130.361 |
00.71 |
0.130.371 |
0.180.271 |
0.30.111 |
0.370.311 |
01.61 |
0.380.341 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналогискороцентровстей тяжестизвеньев |
S |
7740 47.5 |
79.440 49.8 |
68.840 58.4 |
45.440 27.7 |
7.640 95.2 |
45.440 38.1 |
68.640 66.5 |
79.440 51 |
77.340 46 |
12040 320 |
7740 47.5 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скоростей звеньев |
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналоги относительных |
EF |
95 |
73.8 |
45.4 |
31.8 |
0 |
31.8 |
44.8 |
73.6 |
92 |
0 |
95 |
|
|
BE |
84.8 |
28.2 |
68.1 |
90.4 |
175.1 |
92.4 |
68.7 |
27.7 |
76.3 |
400 |
84.8 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скоростейАналогиточек кинематическихпар |
DB |
75.4080 95 0 |
79.4080 81.2 32.7 |
68080 73.4 49.8 |
37.8080 42.6 20.1 |
0080 95.2 95.2 |
37.8080 42.6 39.9 |
68080 73.2 66.9 |
79.4080 81.2 36.2 |
76080 92 0 |
0080 320 320 |
75.4080 95 0 |
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
|
0 |
10 |
55 |
100 |
145 |
190 |
235 |
280 |
289 |
325 |
360 |
|
|
° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15
3.5. Оформление работы
Работа должна содержать:
I.Пояснительную записку, в которой приводятся исходные данные для расчета (структурные группы, схемы расположения опорных точек), излагается процесс синтеза (построения) механизма, структурного анализа механизма, приводится подробный кинематический анализ одного из положений механизма (кроме крайнего) и размещаются таблицы
1 и 2 для построения графиков и последующего их использования в курсовом проекте.
II.Графическую часть, выполненную в масштабе на произвольном формате (А1, А2, А3, А4 или их комбинации) и содержащую кинематическую схему механизма (см. рис. 2 примера), структурную схему механизма (см. рис. 3), план положений механизма (см. рис. 5) со всеми по-
ложениями, включая крайние, и графики зависимостей S( 1) и V ( 1) ( 5 ( 1) и 5 ( 1)) для выбранной точки выходного звена.
4. Задания повышенной сложности
Задания предназначены для студентов, обладающих склонностью к исследовательским работам. При использовании балльно-рейтинговой системы оценки успеваемости студентов рекомендуется базовую оценку увеличивать на соответствующий коэффициент К.
1.Кинематический анализ механизма, состоящего из 3 и более структурных групп (К=1,1).
Номера структурных групп в этом случае выбираются по цифрам номера зачетки от предпоследней к первой.
2. Кинематический анализ механизма с двумя степенями свободы
(К=1,2).
В этом задании механизм имеет два начальных звена с вращательным движением. Номера структурных групп определяются согласно обычному заданию. Значения угловых скоростей начальных звеньев выбираются из таблицы 3.
Таблица 3
Последняя |
|
|
|
|
|
|
|
|
|
|
|
цифра |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
зачетной |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
книжки |
|
|
|
|
|
|
|
|
|
|
|
1 |
5 |
5 |
5 |
5 |
10 |
10 |
10 |
20 |
20 |
40 |
|
2 |
5 |
10 |
20 |
40 |
10 |
20 |
40 |
20 |
40 |
40 |
16
Синтез механизма отличается от синтеза в обычной задаче тем, что к последней структурной группе добавляется еще одно звено, которое и будет вторым начальным звеном. Построение планов скоростей рекомендуется вести согласно методике, изложенной в Приложении 3.
3.Кинематический анализ механизма со структурными группами 3-его класса и выше (К=1,5).
В этом случае номера первой и третьей структурных групп определяются согласно обычному заданию, вторую структурную группу (3-его или выше класса) задает преподаватель. Построение плана аналогов скоростей рекомендуется начинать с построения фигуры, подобной этой структурной группе. Затем достроить план к начальной точке. Сообразуясь с величиной начального звена и длиной вектора, изображающего аналог скорости точки начального звена, можно затем определить масштаб и провести все дальнейшие необходимые построения и расчеты.
4. Аналитический метод кинематического расчета механизма (К=2). Необходимо получить аналитическую зависимость S( 1 ) и V (1 ) ( 5 ( 1) и
5 ( 1)), вычислить кинематические параметры, необходимые для заполнения таблиц 1 и 2, проверить вычисления методом планов.
5. Моделирование работы механизма в системе MathCAD (К=2,2).
В дополнении к заданию 4 требуется выполнить анимацию работы синтезированного механизма в пакете MathCAD, либо математическом или графическом пакете, которым владеет студент.
Библиографический список
1.Теория механизмов и машин: Учеб. для втузов/ К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова.- М.: высш. Шк., 1987.
2.Артоболевский И.И. теория механизмов и машин.- М.: Наука, 1975. 3.Артоболевский И.И., Эдельштейн Б.В. Сборник задач по теории меха-
низмов и машин.- М.: Наука, 1973.
17
Глоссарий
Звено – элемент механизма, обладающий относительной подвижностью. Может состоять из одной или нескольких деталей.
Кинематическая пара – соединение звеньев, не мешающее их относительной подвижности.
Кинематическая цепь – последовательность звеньев, образующих кинематические пары.
Кривошип – начальное звено механизма, совершающее вращательной движение вокруг неподвижной оси.
Кулисный камень – см. ползун.
Кулиса - промежуточное звено механизма, совершающее вращательной движение вокруг неподвижной оси.
Механизм – искусственно созданная система, преобразующая движения одного или нескольких твердых тел в требуемые движения других твердых тел в соответствие с функциональным назначением машины.
Направляющая – звено или часть стойки, которое задает направление движения другого звена.
План положений механизма – чертеж, на котором изображены ряд последовательных положений механизма за полный цикл его работы. Обычно положения выбираются в соответствии с положением начального звена (через 15, 30 или 45 градусов).
План скоростей – чертеж, на котором изображаются вектора абсолютных скоростей точек звеньев механизма. Все вектора абсолютных скоростей выходят из одной точки (полюса). План скоростей звена подобен самому звену и повернут на 90 в сторону мгновенного вращения звена.
Ползун – звено механизма, совершающее относительное поступательное движение.
Шатун – звено механизма, совершающее сложное плоскопараллельное движение. Шатун не соединен со стойкой.
18
Приложение 1
Таблица П1.1 Данные для определения положения опорных точек
Расположение точек |
A1D1F1 |
A1D1F2 |
A1D2F1 |
A1D2F2 |
A2D1F1 |
A2D1F2 |
A2D2F1 |
A2D2F2 |
|
A, D и F |
|
|
|
|
|
|
|
|
|
Предпоследняя цифра |
0 или |
2 |
3 |
4 |
5 |
6 |
7 |
8 или |
|
номера |
зачетной |
1 |
|
|
|
|
|
|
9 |
книжки |
|
|
|
|
|
|
|
|
|
Угол наклона направ- |
0 |
45 |
90 |
135 |
0 |
45 |
90 |
135 |
|
ляющей для групп V и |
|
|
|
|
|
|
|
|
|
VI |
|
|
|
|
|
|
|
|
|
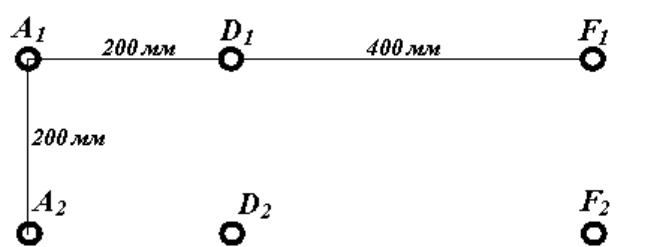
1.По таблице П1.1 определяется расположение точек A, D и F, а также угол наклона направляющей для структурных групп V и VI.
2.Начальное звено присоединяется к стойке в точке A.
3.Первая структурная группа в точке 1 присоединяется к начальному звену, в точке 3 – к стойке в точке D.
4.Вторая структурная группа присоединяется точкой 1 к точке 4 первой структурной группы, и точкой 3 к стойке в точке F.
19
|
|
|
|
|
Приложение 2 |
|
|
|
|
|
|
I |
|
V |
|
IX |
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
|
VI |
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
III |
|
VII |
|
XI |
|
|
|
|
|
|
|
|
|
|
|
|
|
IV |
|
VIII |
|
XII |
|
|
|
|
|
|
|
|
|
|
|
|
|
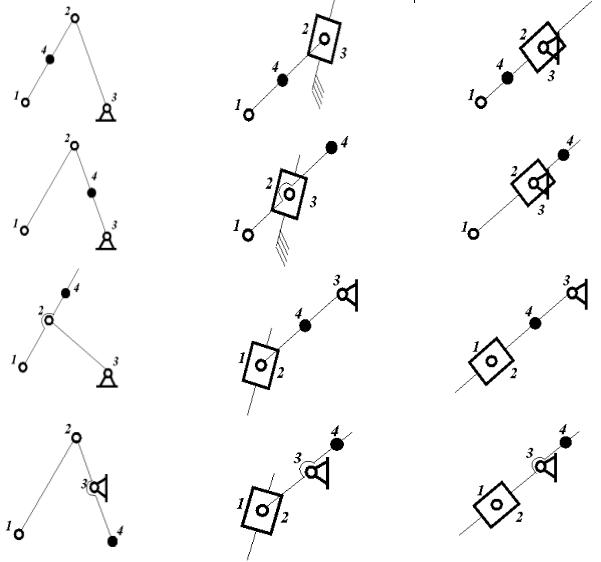
Таблица П2.1
Номер структурной группы |
I |
II |
III |
IV |
V |
VI |
VII |
VIII |
IX |
X |
XI |
XII |
Номер студента по списку |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
Номер студента по списку |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
Номер студента по списку |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
Таблица П2.2
Номер структурной группы |
VII |
VIII |
IX |
X |
XI |
XII |
Последняя цифра номера зачетной книжки |
0 или 6 |
1 или 7 |
2 или 8 |
3 или 9 |
4 |
5 |
20