

5.4. Determining Static Forces by Means of Velocity Image
In many cases the mechanical advantage of a mechanism is desired and in such cases, a force analysis can be used to determine the mechanical advantage. Making a complete analysis, however, requires the determination of the forces at each turning pair and between all sliding links. This represents considerable work in order to determine only the ratio of two forces. However, we can make use of the velocity polygon to determine the mechanical advantage, and usually it is much easier to draw a velocity image than it is to make a complete force analysis.
The principle of virtual work allows making use of the velocity image in the determination of forces. From the subject of Theoretical Mechanics the principle can be stated as follows: the necessary and sufficient conditions for the equilibrium of a system is that the total virtual work done by all the external forces is equal to zero for any and all virtual displacements consistent with the constraints, if the friction forces be neglected.
Fig. 5.6. Principle of
virtual work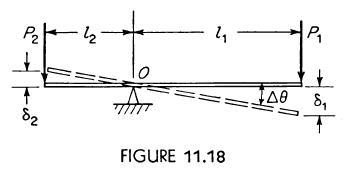
This principle can be demonstrated by a lever, as
shown in Fig. 5.6, hinged to the fixed body at 0
and in equilibrium under the external forces
![]() and
and![]() . The principle of virtual work states that if we let the lever
rotate through a small angle
. The principle of virtual work states that if we let the lever
rotate through a small angle![]() , causing the forces to move through small displacements
, causing the forces to move through small displacements![]() and
and![]() , the work done by the forces in moving through these small
displacements is zero, or
, the work done by the forces in moving through these small
displacements is zero, or
![]()
Note that the force
![]() does positive work on the lever since the displacement has the same
sense as the force and the force
does positive work on the lever since the displacement has the same
sense as the force and the force![]() does negative work, the displacement being of opposite sense to the
force. The displacement must be infinitesimal in magnitude for the
equation to hold, since the works is the product of the force and its
displacement in the direction of the force. If the displacement is of
finite magnitude, it will have a component normal to the force and
the force does no work in moving normal to its direction. The force
at the pin joint does no work since the point has no motion and we
have assumed zero friction. From the above equation we can get the
ratio of the forces
does negative work, the displacement being of opposite sense to the
force. The displacement must be infinitesimal in magnitude for the
equation to hold, since the works is the product of the force and its
displacement in the direction of the force. If the displacement is of
finite magnitude, it will have a component normal to the force and
the force does no work in moving normal to its direction. The force
at the pin joint does no work since the point has no motion and we
have assumed zero friction. From the above equation we can get the
ratio of the forces
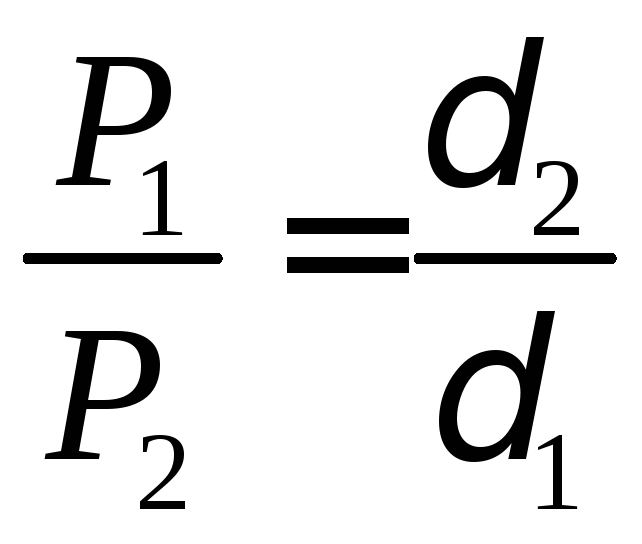 .
(5.3)
.
(5.3)
Hence the forces are inversely proportional to their displacements.
We can also show that the ratio of the displacements is the same as the ratio of the velocities of the points of action of the forces if we assume an angular velocity of the lever. The ratio of the displacements can be written as
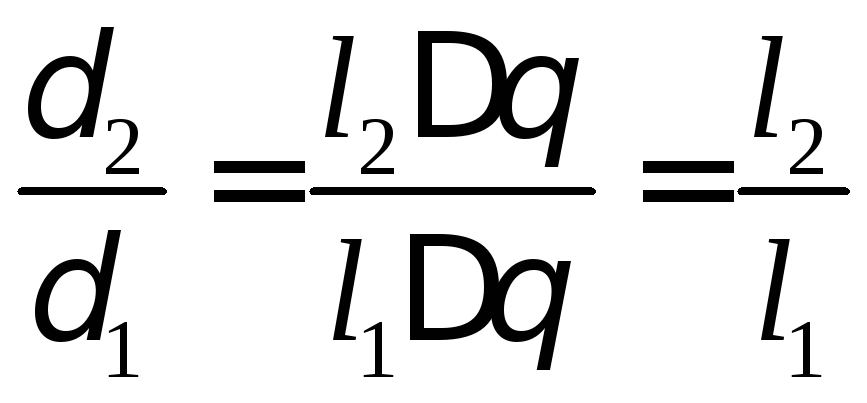 .
.
Then the ratio of the velocities is
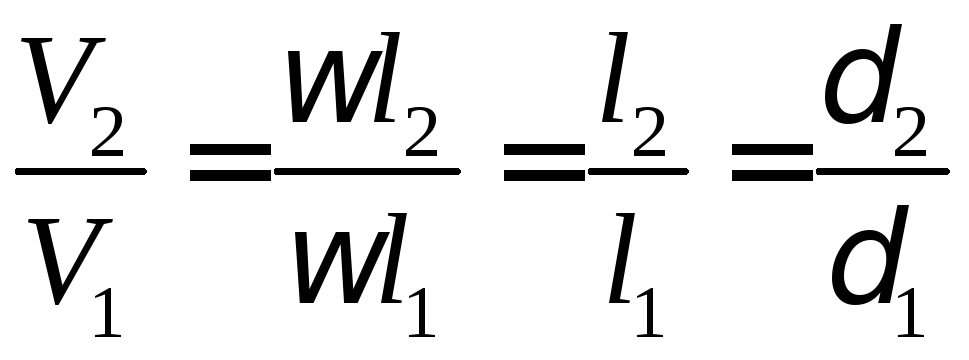 .
(5.4)
.
(5.4)
Substituting Eq. (5.4) into Eq. (5.3) we obtain
 .
(5.5)
.
(5.5)
Hence the forces are inversely proportional to the instantaneous velocities of the points of action of the forces. It should be pointed out that the velocities in this case are in the direction of the forces, and in cases where the velocities are not in the direction of the forces, only the component along the force direction should be used in the above equation, since the velocity in the direction of the work absorbing component of displacement is the only velocity associated with work.