

Пожаркова_ТАУ_ЛР_9434
.pdf21
W |
|
(p) W (p)W (p) 10 |
p2 14.5p 70 |
|
10p2 145p 700 |
|||||
yg |
|
|
|
|
- |
|||||
|
|
|
|
|||||||
|
1 |
2 |
|
p3 12.5p2 35p 100 |
|
p3 12.5p2 35p 100 |
||||
|
|
|
|
|
|
|||||
передаточная функция прямой цепи по задающему воздействию; |
||||||||||
Wyf |
(p) W3 |
(p) |
p2 |
12p 20 |
|
|
|
|||
|
|
- передаточная функция прямой цепи |
||||||||
|
|
|||||||||
|
|
|
|
p3 12.5p2 35p 100 |
|
|
|
|||
по возмущающему воздействию;
Wg (p) 1 - передаточная функция прямой цепи по ошибке от задающего воздействия;
Wf |
(p) W3 |
(p) |
|
p2 12p 20 |
||
|
|
|
- передаточная функция прямой |
|||
p3 |
12.5p2 |
|
||||
|
|
|
35p 100 |
|||
цепи по ошибке от возмущающего воздействия.
Определим передаточные функции замкнутой системы:
10p2 145p 700
Фyg (p)
Фyf (p)
Фg(p)
Ф f (p)
Wyg (p)
1 WРЦ (p)
Wyf (p)
1 WРЦ (p)
Wg (p)
1 WРЦ(p)
W f (p)
1 WРЦ (p)
|
|
|
p3 |
12.5p2 35p 100 |
|
|
|
|
|
10p2 145p 700 |
|
; |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
10p2 145p 700 |
|
p3 |
|
|
|
|
|
||||||||||||
|
1 |
|
|
|
|
|
|
|
22.5p2 180p 800 |
|
|
||||||||||||||||
|
|
|
p3 12.5p2 35p 100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
p2 12p 20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
p3 |
12.5p2 35p 100 |
|
|
|
|
|
p2 12p 20 |
|
|
; |
|
|||||||||||||
1 |
|
10p2 145p 700 |
|
|
p |
3 22.5p2 180p 800 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
p3 12.5p2 35p 100 |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
p3 |
12.5p2 35p 100 |
; |
|
|
||||||
1 |
|
|
|
|
10p2 145p 700 |
|
|
|
180p 800 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
p3 22.5p2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
p3 12.5p2 35p 100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
p2 12p 20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
p3 12.5p2 35p 100 |
|
|
|
|
|
p2 |
12p 20 |
|
|
|
. |
||||||||||||||
1 |
|
|
10p2 145p 700 |
|
|
|
p3 22.5p2 180p 800 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
p3 12.5p2 35p 100 |
|
|
|
|
|
|
|||||||||||||
С учетом произведенных вычислений составим дифференциальные уравнения данной системы для выходного сигнала y(t) и ошибки (t). Уравнения в операторной форме:
Y(p) yg (p)G(p) yf (p)F(p), E(p) g (p)G(p) f (p)F(p).
Подставим в уравнения передаточные функции замкнутой системы. Для выходной координаты ОУ:
22
Y(p) yg (p)G(p) yf (p)F(p), |
|
|
|
|
|
||||||
Y(p) |
|
|
10p2 145p 700 |
|
G(p) |
|
|
p2 12p 20 |
|
F(p), |
|
|
p3 |
22.5p2 180p 800 |
|
p3 |
22.5p2 180p 800 |
||||||
|
|
|
|
|
|||||||
(p3 22.5p2 180p 800)Y(p) (10p2 |
145p 700)G(p) (p2 12p 20)F(p). |
||||||||||
Для ошибки: |
|
|
|
|
|
|
|
|
|||
E(p) g (p)G(p) f (p)F(p), |
|
|
|
|
|
||||||
E(p) |
|
p |
3 12.5p2 |
35p 100 |
G(p) |
|
|
p2 12p 20 |
F(p), |
||
|
p3 |
22.5p2 |
180p 800 |
|
p3 |
22.5p2 180p 800 |
|||||
|
|
|
|
|
|||||||
(p3 22.5p2 180p 800)E(p)
(p3 12.5p2 35p 100)G(p) (p2 12p 20)F(p).
Раскроем скобки, подвергнем полученные уравнения обратному преобразованию Лапласа. Получим:
y'''(t) 22.5y''(t) 180y'(t) 800y(t)
10g''(t) 145g'(t) 700g(t) f ''(t) 12f '(t) 20f (t),'''(t) 22.5 ''(t) 180 '(t) 800 (t)
g'''(t) 12.5g''(t) 35g'(t) 100g(t) f ''(t) 12f '(t) 20f (t).
ЗАДАНИЕ
Таблица 1. Уравнения объекта управления
|
|
|
|
|
|
f t |
|
|
Звено |
|
Уравнения звеньев объекта управления |
||
g t |
t |
|
|
u t |
|
y t |
|
1 |
|
Z1'(t)+A1 Z1(t) = B1 V1(t) |
|||
Kp |
|
ОУ |
|
|
|||||||||
|
|
|
|
|
|
|
|
2 |
|
Z2 '(t)+A2 Z2 (t) = B2 V2 '(t) D2 V2 (t) |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
3 |
|
Z3 '(t) = K3V3 (t) |
|
|
Рис.1.17. Функциональная схема САУ |
|
|
|
|
|
|||||||
|
4 |
|
Z4 (t) = K4V4 (t) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
Z5 (t) = K5V5 (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2. Исходные данные |
|
|
|
|
|
|
|
|
|
|
|
|||
Объект управления |
Квартал даты рождения |
|
Kp |
Квартал даты рождения + номер группы |
|||||||||
А1 |
|
Последняя цифра года рождения |
|
|
|
A2 |
0.1*Номер по списку |
||||||
B1 |
|
10*День недели даты рождения в текущем. году |
B2 |
0.05*Число даты рождения |
|||||||||
D2 |
|
Квартал даты рождения |
|
|
|
G1 |
Месяц рождения |
||||||
К3 |
|
1 |
|
|
|
|
|
|
|
|
1 |
Квартал даты рождения |
|
К4 |
|
Номер группы |
|
|
|
|
|
|
|
G2 |
Номер группы * Квартал даты рождения |
||
К5 |
|
Месяц рождения |
|
|
|
|
|
2 |
5 * Месяц рождения |
||||
Квартал даты рождения |
|
|
|
||||||||||
|
|
|
|
|
2 |
0.1 * Число даты рождения |
|||||||
23
|
|
V1(t)=V5(t) |
|
|
|
|
W5(p) |
|
Z5(t) |
|
|
f(t) |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
u(t) |
|
|
|
|
|
|
|
Z1(t) |
|
|
V2(t) |
|
|
|
|
|
|
|
|
|
Z2(t) |
|
|
V3(t) |
|
|
|
|
|
y(t) |
|||
|
|
W1(p) |
|
|
|
|
W2(p) |
|
|
|
|
|
|
W3(p) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Z4(t) |
|
|
|
|
|
|
|
|
|
|
|
|
V4(t)=Z3(t) |
|
|||||||
|
ОУ-1 |
|
|
|
|
|
|
W4(p) |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
V2(t)=V4(t)=Z1(t) |
|
|
|
|
|
|
|
|
|
Z4(t) |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
W4(p) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f(t) |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
u(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z2(t) |
V3(t) |
|
|
|
|
|
|
Z3(t) |
y(t) |
|||
|
|
W1(p) |
|
|
|
|
|
W2(p) |
|
|
|
|
|
W3(p) |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V1(t)=V5(t) |
|
|
|
|
|
|
Z5(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
W5(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОУ-2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z5(t) |
|
|
|
|
|
|
|
|
|
|
V5(t)= V3(t)=Z2(t) |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W5(p) |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
f(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
u(t) |
|
V1(t) |
|
|
|
|
|
Z1(t) |
V2(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
W1(p) |
|
|
|
|
W2(p) |
|
|
|
|
|
|
|
|
W3(p) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z4(t) |
|
|
|
|
|
|
|
|
V4(t)=Z3(t) |
|
||||||||
|
ОУ-3 |
|
|
|
|
|
|
|
|
|
|
W4(p) |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Z5(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
V5(t)=Z2(t) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
W5(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
u(t) |
|
|
V1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z3(t) |
y(t) |
||
|
|
|
|
|
|
|
Z1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
W1(p) |
|
|
|
|
|
|
|
W2(p) |
|
|
W3(p) |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
f(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z4(t) |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V2(t)=V4(t) |
|
|
|
|
|
|
|
|
|||||||
|
ОУ-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
W4(p) |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
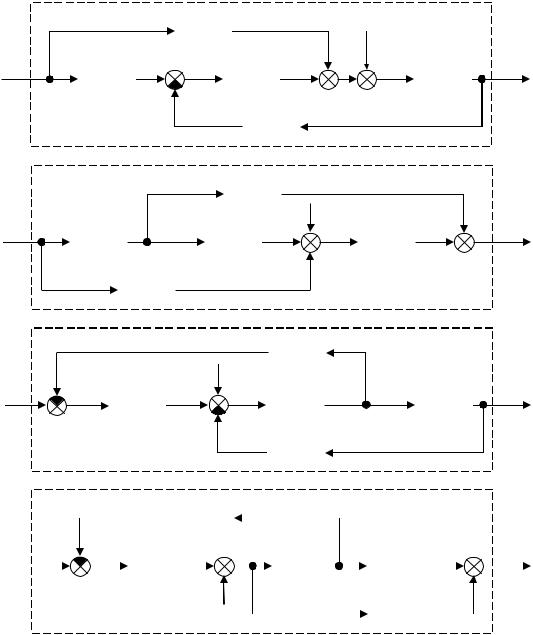
Рис.1.18. Структурные схемы объекта управления
ПОСЛЕДОВАТЕЛЬНОСТЬ ПРОВЕДЕНИЯ РАБОТЫ
1.Составить дифференциальное уравнение объекта управления по его структурной схеме (рис.1.18) и уравнением составляющих ее звеньев (табл.1). Охарактеризовать каждое звено с позиции типовых динамических звеньев.
2.По функциональной схеме САУ (рис.1.17) и результатам п.1 составить структурную схему САУ. Определить передаточные функции
24
разомкнутой САУ относительно выходной координаты y(t) по задающему g(t) и возмущающему f(t) воздействиям.
3.Получить передаточные функции замкнутой системы с единичной отрицательной обратной связью по задающему и возмущающему воздействиям относительно выходной координаты y(t) и ошибки регулирования (t).
СОДЕРЖАНИЕ ОТЧЕТА
Отчет должен содержать:
исходные данные, все промежуточные аналитические выводы, структурные схемы, значения параметров, в которых должны быть отражены все исследования, проведенные в работе согласно заданию;
выводы по каждому пункту задания, где предполагается проведение исследований;
общие выводы по всей работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Перечислите основные этапы процесса управления.
2.Какие основные принципы автоматического управления вам известны?
3.Какие виды классификаций САУ вы знаете?
4.Дайте определение дифференциальному уравнению.
5.Что такое передаточная функция?
6.Перечислите способы соединений динамических звеньев.
7.Какие правила преобразования структурных схем вы знаете?
Лабораторная работа №2. ПРИМЕНЕНИЕ САПР ПРИ ИССЛЕДОВАНИИ CИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Цель – изучить алгоритмы создания и исследования моделей САУ в ПК «МВТУ», а также методы расчета параметров систем в пакете Mаthcad.
ОБЩИЕ СВЕДЕНИЯ 2.1.ПРОГРАММНЫЙ КОМПЛЕКС «МВТУ»
Программный комплекс «Моделирование в технических устройствах» (ПК «МВТУ») - современная среда интеллектуального САПР, предназначенная для детального исследования и анализа нестационарных процессов в системах автоматического управления, описание динамики которых может быть реализовано методами структурного моделирования.
25
Является альтернативой программным продуктам SIMULINK, VisSim, MATRIXx и др. Программа распространяется свободно.
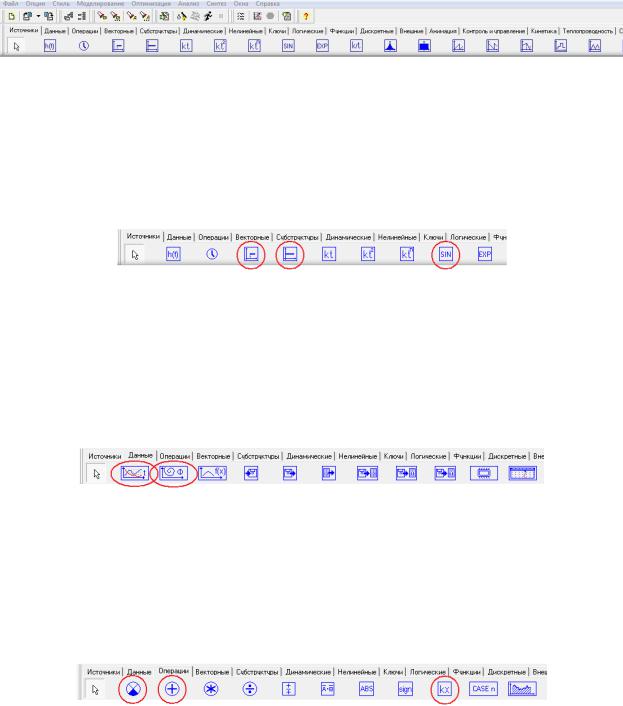
Окно программы (рис.2.1) состоит из пунктов меню и рабочего поля, которое открывается при создании нового документа нажатием на пиктограмму  .
.
Рис.2.1 Панель управления ПК «МВТУ»
На рабочем поле собирается схема, которая состоит из блоков различных библиотек. Ниже приведено краткое описание основных блоков, используемых при создании моделей САУ в лабораторном практикуме.
1. Библиотека блоков «Источники» (используются для создания источников сигналов):
Рис.2.2 Библиотека блоков «Источники»
«Ступенька» - ступенчатое воздействие
«Константа» - постоянное воздействие
«Синусоида» - гармоническое воздействие
2.Библиотека блоков «Данные» (используются для создания приемников сигналов):
Рис.2.3 Библиотека блоков «Данные»
«Временной график» - построение графика изменяющегося во времени сигнала
«Фазовый портрет» - построение фазовой траектории
3.Библиотека блоков «Операции» (используются для операций над сигналами):
Рис.2.4 Библиотека блоков «Операции»

26
«Сравнивающее устройство» - вычисляет разность сигналов. По умолчанию сигнал, поступающий на нижний вход, берется со знаком «-
»
«Сумматор» - вычисляет сумму сигналов. По умолчанию сигнал, поступающий на нижний вход, берется со знаком «-» (!!!)
«Усилитель» - умножает величину входного сигнала на заданный коэффициент
4.Библиотека блоков «Динамические» (используются для задания динамических звеньев):
Рис.2.5 Библиотека блоков «Динамические»
Составим модель ОУ (рис.2.6) согласно его структурной схеме
(рис.1.10).
Рис.2.6
Для этого необходимо выполнить следующие действия:
1.Выбрать источники входных (управляющего и возмущающего) воздействий, например, «Константа» (библиотека «Источники»). Задать значение выходного сигнала блоков в диалоговом окне, вызываемом двойным нажатием на левую клавишу мыши.
2.Выбрать блоки, моделирующие динамические звенья, составляющие ОУ. Пусть
W(p) |
5 |
, W (p) |
0.5p 10 |
, W (p) |
1 |
, W (p) 1, W (p) 1, W (p) 1. |
|||
|
|
p 2 |
|
||||||
1 |
p 10 2 |
3 |
p 4 |
5 |
6 |
||||
Используем блоки |
|
«Апериодическое», |
|
«W(s) общего |
|||||
вида»,  «Интегратор» и
«Интегратор» и  «Усилитель» (библиотека «Динамические»).
«Усилитель» (библиотека «Динамические»).
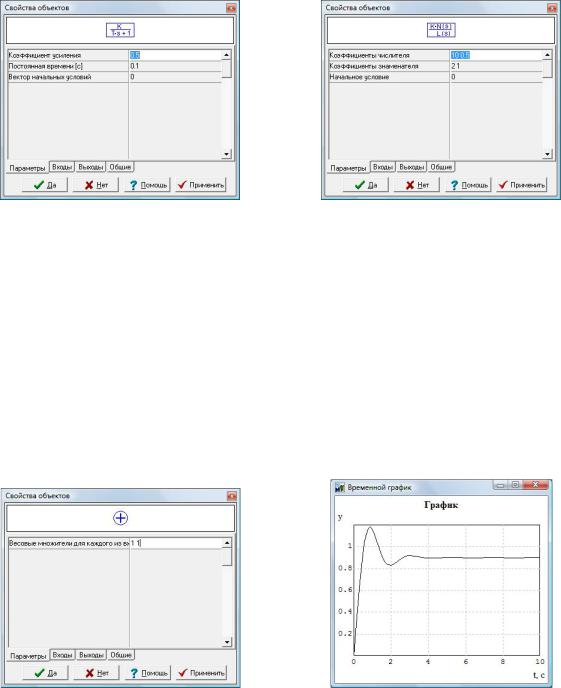
Для того, чтобы задать блоком  «Апериодическое» звено с передаточной функцией W1(p), приведем его передаточную функцию к
«Апериодическое» звено с передаточной функцией W1(p), приведем его передаточную функцию к
общему виду: |
W(p) |
5 |
|
|
0.5 |
, затем в диалоговом окне (рис.2.7), |
|
|
|||||
|
1 |
p 10 |
|
0.1p 1 |
||
|
|
|
||||
вызываемом двойным нажатием на левую клавишу мыши, необходимо
27
указать коэффициент усиления (0.5) и постоянную времени (0.1). Для того, чтобы задать блоком «W(s) общего вида» звено с передаточной функцией
W (p) |
0.5p 10 |
|
, необходимо в окне (рис.2.8), вызываемом двойным |
|
|||
2 |
p 2 |
|
|
|
|
||
нажатием на левую клавишу мыши, перечислить коэффициенты числителя и коэффициенты знаменателя, начиная со свободного члена, в данном случае b0 10,b1 0.5; a0 2,a1 1 (если какой-то коэффициент отсутствует – на его
месте ставится 0).
Рис.2.7 Окно настройки параметров |
Рис.2.8 Окно настройки параметров |
блока «Апериодическое» |
блока «W(s) общего вида» |
3.Выбрать приемник сигнала, например, блок «Временной график» (библиотека «Данные»).
4.Соединить данные блоки линиями связи в соответствии со структурной схемой ОУ (рис.19), используя также блоки «Сравнивающее устройство» (библиотека «Операции») и «Сумматор» (библиотека «Операции»), весовые множители каждого из входов которого, необходимо указать равными 1 (рис.2.9). Для добавления на линию связи узла (точки разветвления), необходимо выбрать соответствующий пункт в контекстном меню, вызываемом правой кнопкой мыши (или удерживать клавишу CTRL).
Рис.2.9 Окно настройки параметров |
Рис.2.10 Временной график |
блока «Апериодическое» |
выходного сигнала ОУ |

28
5.Запустим моделирование, откроем график выходного сигнала ОУ
(рис.2.10).
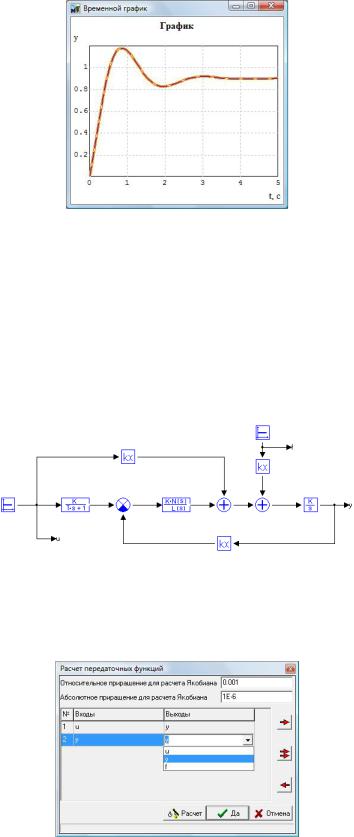
6.Настроим параметры моделирования в меню Моделирование/Параметры расчета в соответствии с указанными на рис.2.11. Получим график выходного сигнала ОУ, охваченного отрицательной обратной связью, который представлен на рис.2.12.
Рис.2.11 Окно настройки параметров |
Рис.2.12 Временной график |
моделирования |
выходного сигнала ОУ |
Для проверки преобразований структурной схемы, выполненных в разделе 1.5, сравним выходные сигналы моделей ОУ, со структурными схемами рис.1.10 и рис.1.15. Для модели схемы (рис.1.15) задаются передаточные функции:
Wyu |
(p) |
p2 |
14.5p 70 |
и Wyf |
(p) |
|
p2 12p 20 |
|||
|
|
|
|
|
|
. |
||||
p3 12.5p2 35p 100 |
p3 |
12.5p2 |
|
|||||||
|
|
|
|
35p 100 |
||||||
Входные сигналы (управляющее и возмущающее воздействие) обеих моделей ОУ одинаковые (рис.2.13).
Рис.2.13
Выходные сигналы двух моделей ОУ можно вывести на один график (рис.1.14), указав в свойствах блока «Временной график» параметр «Число
29
входов» равным 2. Выходные сигналы совпадают, следовательно упрощение структурной схемы в разделе 1.5 проведено верно.
Рис.2.14
Определим передаточные функции по управляющему и по внешнему воздействиям с помощью пакета МВТУ из исходной схемы объекта исследования без использования математических преобразований. Для этого необходимо:
1.Создать модель ОУ (рис.2.15). Для корректного расчета необходимо, чтобы это была единственная модель в документе.
2.Снять значения сигналов со входов (u, f) и выхода (y) схемы, используя блок «В память» (библиотека «Субструктуры») (рис.2.15).
Рис.2.15
3.С помощью меню Анализ/Передаточные функции вызвать диалоговое окно «Расчет передаточных функций», настроить его параметры в соответствии с рис.2.16 и запустить расчет.
Рис.2.16
30
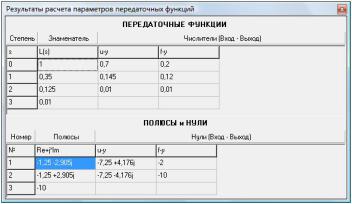
Будут получены следующие коэффициенты полиномов числителей и знаменателей передаточных функций ОУ по задающему и возмущающему воздействиям (рис.2.17):
|
|
|
|
Рис.2.17 |
|
|
|
|||
4. На основании рис.2.17 запишем передаточные функции ОУ: |
|
|
||||||||
W |
(p) |
0.7 0.145p 0.01p |
2 |
- |
передаточная |
функция |
ОУ |
по |
||
|
|
|
||||||||
yu |
|
1 0.35p 0.125p2 |
0.01p3 |
|
|
|
|
|
||
|
|
|
|
|
|
|
||||
управляющему воздействию; |
|
|
|
|
|
|
||||
Wyf |
(p) |
0.2 0.12p 0.01p2 |
|
- |
передаточная |
функция |
ОУ |
по |
||
1 0.35p 0.125p2 |
0.01p3 |
|||||||||
|
|
|
|
|
|
|
||||
возмущающему воздействию.
Если числитель и знаменатель полученных в ПК «МВТУ» передаточных функций умножить на 100, то они совпадают с найденными с разделе 1.5 аналитически.
2.2.MATHCAD
Mathcad – это система компьютерной алгебры из класса систем автоматизированного проектирования, ориентированная на подготовку интерактивных документов с вычислениями и визуальным сопровождением, отличается легкостью использования, поскольку описание решения математических задач задается с помощью традиционных математических формул и знаков.
Рассмотрим некоторые операции, выполненные в версии Mathcad 2001, которые целесообразно применить при расчете характеристик САУ.
1. Упрощение выражений.