

Lektsii_ispyt
.pdf31
Рис. 24. Кинематическая схема клинометра с уровнем
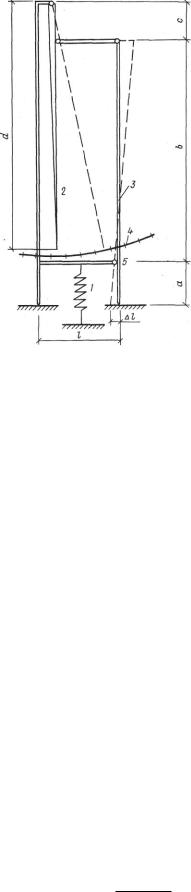
Тензометр - измеритель деформации, показание которого пропорционально перемещению двух точек поверхности элемента конструкции. На рис. 25 показана схема рычажного тензометра. С помощью струбцины 1 заостренные грани опорных призм тензометра прижаты к исследуемой поверхности; расстояние между призмами l называется базой прибора. При деформации материала (например, сжатии) и укорочении базы на l рычаг 3 поворачивается относительно шарнира 5 (новое положение показано пунктиром) и перемещает стрелку 2 по шкале 4. Масштаб увеличения
тензометра определяется соотношением плеч рычагов - k badc и примерно
равен 1000. В результате взаимное перемещение опорных граней на l =1 мкм вызывает отклонение конца стрелки на одно деление шкалы, равное 1 мм. Цена деления шкалы в относительной деформации зависит от базы l и
определяется как ll . Если градиент деформаций в пределах базы
тензорезистора отсутствует, то для уменьшения цены деления шкалы размер базы увеличивают. Обычно рычажные тензометры выпускаются с базой l = 20 мм; с помощью прикрепляемой к корпусу тензометра дополнительной пластины с опорной призмой база может быть увеличена до 100 и даже 200 мм. Значительная база измерений позволяет усреднить неоднородности деформирования, обусловленные дискретностью структуры материала, например, бетона с крупным заполнителем.
32
Рис. 25. Кинематическая схема рычажного тензометра
Оптические методы измерения перемещений применяются в основном при проведении натурных испытаний при измерении перемещений элементов зданий или сооружения в целом. Основными средствами измерений являются геодезические приборы, теодолиты, нивелиры, стереофотокомпараторы и др. Для фиксирования на сооружении определенных точек (или сечений) используются различного вида геодезические марки и подвесные рейки с миллиметровой шкалой. Измерение горизонтальных перемещений осуществляется с помощью теодолита, который устанавливается на расстоянии 20—40 м от сооружения (в зависимости от его высоты). В измеряемых точках сооружения закрепляют марки: полоски плотной бумаги или лейкопластыря с нанесенным перекрестием линий. Методом последовательного наведения теодолита на наблюдаемые марки на сооружении и марку, укрепленную на неподвижном основании, измеряют горизонтальные углы. Зная расстояние от марок до теодолита, вычисляют линейные перемещения наблюдаемых точек.
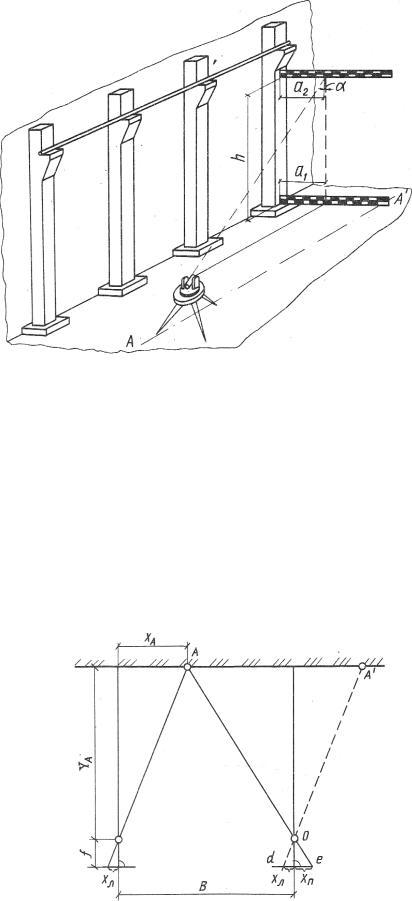
Для определения крена элементов сооружений применяют метод бокового нивелирования. С этой целью внутри сооружения или вне его устанавливают теодолит и постоянными знаками отмечают створ АА' (рис. 26. Затем на определенном расстоянии h к колоннам поочередно прикладывают нормально ориентированную рейку и берут отсчеты при двух положениях трубы а1 и а2. Угол крена колонн α определяется по формуле
tg a1 a2 . h
33
Рис. 26.Схема определения крена сооружения методом бокового нивелирования
Фотограмметрическая съемка применяется для определения положения большого числа точек на сооружении в одной плоскости х, г, параллельно которой устанавливается плоскость снимка; съемка выполняется с одной точки.
Стереофотограмметрический метод измерения перемещений используется в тех случаях, когда необходимо определить пространственное положение точек сооружения — в направлении осей х, у, г. В этом случае с помощью фототеодолита выполняется съемка с двух точек, расстояние между которыми В называется базисом съемки. На рис. 27 показана схема связи координат точек на снимке и координат точек на поверхности сооружения.
Рис. 27. Схема, иллюстрирующая связь координат точек на снимке с координатами соответствующих точек на поверхности сооружения
34
Рассмотрена съемка, при которой оптические оси фототеодолита перпендикулярны линии базиса. Точке А на объекте (с горизонтальной
координатой ХА будут соответствовать проекции хл и хп на снимке левого и |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
правого концов базиса. Проведем вспомогательную пунктирную линию dA |
||||||||||||||||||||
|
|
|
|
|
|
|
и |
|
Ode |
|
получим |
|||||||||
и из подобия треугольников OAA |
|
|
||||||||||||||||||
|
|
YA |
|
|
|
B |
|
|
; |
Y |
|
|
Bf |
; |
||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
f |
|
|
|
xл |
xп |
|
A |
|
|
|
p |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
X |
|
|
|
YA xл |
; |
Z |
|
|
YA zл |
. |
||||||||
|
|
A |
|
A |
|
|||||||||||||||
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
f |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где Z A —вертикальная координата; f |
— фокусное расстояние фотокамеры; |
|||||||||||||||||||
YA — расстояние от |
центра |
|
|
проекции |
|
|
до |
рассматриваемой точки |
||||||||||||
сооружения; xл , zл — |
координаты, |
измеренные |
на левом фотоснимке; |
|||||||||||||||||
p xл xп — продольный параллакс определяемой точки.
Измерение координат и нахождение параллаксов исследуемых точек выполняется с помощью прецизионного оптического прибора — стереокомпаратора. Погрешность определения перемещений в плоскости сооружения, например, при съемке с расстояния в 10 м составляет менее 1 мм, а перемещений из плоскости сооружения — примерно 3 мм. Применение геодезических методов ограничено возможностью съемки и определения перемещений элементов сооружения только в пределах прямой видимости.
Лекция 6
Измерения механических величин с помощью электрических преобразователей
Электрические преобразователи или датчики с электрическими преобразователями отличаются исключительной универсальностью. С помощью электрических датчиков измеряют деформации, перемещения, усилия, ускорения. Они могут применяться как в лабораторных условиях, так и в условиях натурного эксперимента, как при статическом, так и при динамическом воздействии. Выходной сигнал электрических преобразователей удобен для последующего преобразования (усиления, интегрирования), для дистанционной передачи и регистрации.
Первичные преобразователи представляют собой линейную механическую систему, способную воспринять значения измеряемой величины (перемещения, ускорения, усилия и др.) и преобразовать их в относительные перемещения или деформации собственных упругих элементов. Рассмотрим принцип преобразования измеряемой величины.
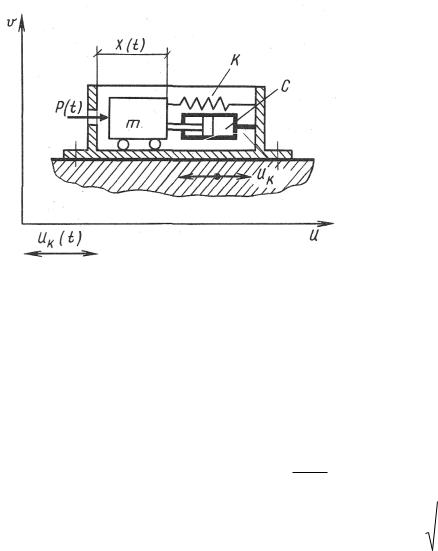
На рис. 28 приведена схема механической системы первичного преобразователя, установленного на исследуемой конструкции.
35
Рис. 28. Схема механической системы первичного преобразователя
На рассматриваемую механическую систему могут действовать ускорение, возникающее при динамическом перемещении конструкции
uk t , и внешнее усилие P t (где t— время, в частном случае t = 0).
Реакцией механической системы на оба указанных воздействия будет перемещение Х(t) массы т. Движение массы т относительно исследуемой конструкции описывается уравнением
X t 2 X t 2 X t u t Pmt ,
Где |
с |
- относительный коэффициент демпфирования; |
|
k |
|
2m |
m |
|
|||
|
|
|
|
- частота собственных колебаний недемпфированной системы; к - жесткость, с - коэффициент демпфирования системы инерционного действия реагирует лишь на ускорение, они могут быть применены только при исследовании динамических процессов.
При использовании рассматриваемой механической системы в качестве первичного измерительного преобразователя реализуется один из двух принципов измерения: инерционный или кинематический.
Кинематический принцип измерения заключается в том, что реакция |
|||
преобразователя X t |
пропорциональна внешней силе |
P t |
или |
измеряемому перемещению конструкции uk t относительно неподвижного
объекта, расположенного вне преобразователя. К преобразователям, основанным на кинематическом принципе измерения, относятся прогибомеры, динамометры, месcдозы, тензометры. При измерении перемещений с помощью прогибомеров в качестве неподвижной системы отсчета используют находящийся вблизи исследуемого объекта фундаментный блок, заделанную в грунт стойку или силовую плиту испытательного стенда.
При реализации инерционного принципа параметры движения |
|||
исследуемой конструкции uk t |
uk t , |
uk t |
измеряют относительно |

36
искусственно созданной неподвижной системы отсчета, выполненной в виде инерционного элемента, прикрепленного к исследуемой конструкции с помощью упругого подвеса. Достоинство измерительных преоб-
разователей инерционного действия заключается |
в том, что они |
||
устанавливаются |
непосредственно |
на изучаемую |
конструкцию и для |
их использования |
не требуется |
контакт с неподвижным объектом вне |
|
прибора. Однако поскольку преобразователи инерционного действия реагирует лишь на ускорение, они могут быть применены только при исследовании динамических процессов.
Рассмотрим режим работы, основные характеристики и источники погрешностей первичных преобразователей. Для анализа возможных амплитудных и фазовых искажений преобразователя инерционного действия рассмотрим случай установки его на объект, совершающий гармонические ко-
лебания с частотой р и амплитудой и0:
uk t u0 sin pt.
В этом случае (поскольку Р(t) = 0) движение системы, приведенной на рис. 27, опишется уравнением
X t 2 X t 2 X t u0p2 sin pt.
Решение такого уравнения, как известно, можно представить в виде
X X1 X2 ,
где X |
1 |
Ae t sin t, где |
|
|
|
2 |
2 |
|
- частота собственных |
||
|
|
|
|
|
|
|
|
|
|
|
|
колебаний системы с учетом затухания, а |
|
|
|
|
|
||||||
|
|
X 2 |
|
u |
p2 siv pt |
|
|
|
|||
|
|
0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 p2 2 42 2 p2 |
|||||||
описывает вынужденные |
колебания |
с частотой, равной частоте |
|||||||||
воздействия р; при этом угол относительного сдвига фаз колебаний объекта и приведенной массы преобразователя
|
2 p |
|
|
arctg |
|
. |
|
2 p2 |
|||
|
|
Рассмотрим вынужденные колебания системы. Реакция колебательной системы преобразователя Х(t) существенно зависит от соотношения частот ω
и р объекта. |
При |
p |
1 и малом демпфировании |
( 2 ) |
|
|
|||||
|
|
|
|
||
выражение для X 2 |
принимает вид: |
|
|||
|
|
|
X2 X t u0 sin pt, |
|
|
т. е. значения перемещений приведенной массы преобразователя Х(t) практически равны перемещениям исследуемого объекта uk t , но колебания преобразователя и объекта совершаются в противофазе. Это следует из выражения для φ, поскольку p и колебания преобразователя отстают на

37
угол , больший / 2 (ибо / 2 ). Рассмотренный режим работы
преобразователя носит название виброметрического, а первичные измерительные устройства, содержащие преобразователь этого типа,
называются виброметрами перемещения.
Если колебательная система преобразователя является относительно
высокочастотной (т. е. |
p |
1), то режим работы такого преобразователя |
|
|
|||
|
|
акселерометрический. Можно показать, что перемещение приведенной
массы преобразователя в этом случае |
|
пропорционально |
ускорению |
|||||||||||||||||||||
исследуемого объекта. |
Представим Х2 |
|
в виде: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
X 2 |
X t |
|
|
u |
0 |
p2 siv pt |
|
|
. |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
p2 2 |
|
|
|
4 2 p2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 |
|
2 |
|
|
|
4 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При |
небольшом |
затухании ( 0,1 0,2) |
|
знаменатель уравнения |
||||||||||||||||||||
стремится к 1, а выражение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
u p2siv pt u |
t |
|
|
|
|||||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
определяет |
ускорение |
колеблющегося |
объекта. |
|
|
Следовательно, |
||||||||||||||||||
перемещение механической системы преобразователя |
|
|
|
|
|
|||||||||||||||||||
|
|
|
X X |
t |
uk t |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пропорционально ускорению его основания, а |
1 |
|
- коэффициент пропор- |
|||||||||||||||||||||
|
|
|
||||||||||||||||||||||
2 |
|
|||||||||||||||||||||||
циональности. При этом, поскольку p и угол изменяется в пределах
0 2 , то колебания преобразователя и объекта совпадают по фазе, а
степень запаздывания перемещений преобразователя зависит от
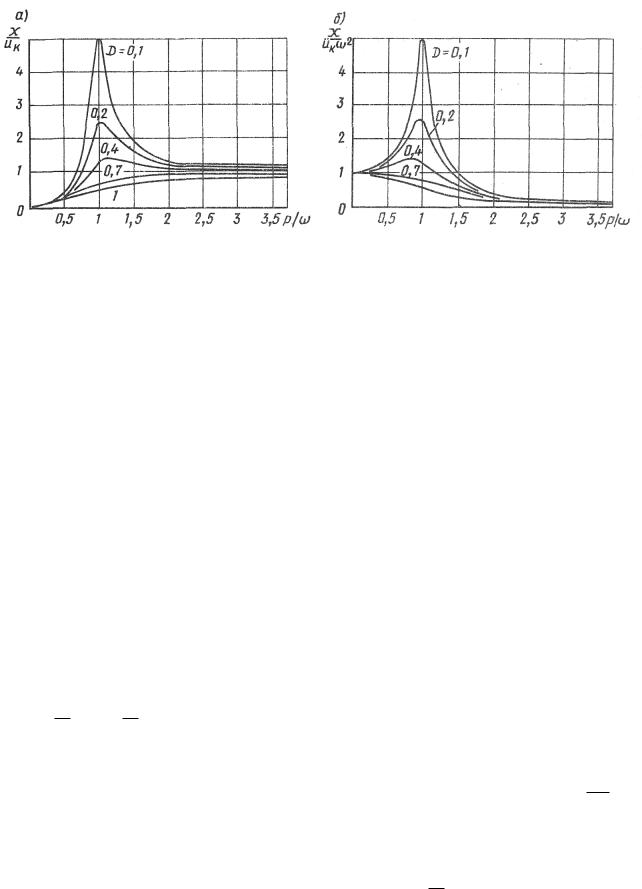
коэффициента демпфирования и значения отношения p 1. На рис. 29
приведены амплитудно-частотные характеристики преобразователей инерционного типа, работающие в режиме виброметра перемещений и акселерометра. Кривые построены для нескольких значений относительного
коэффициента затухания D .
38
Рис. 29. Aмплитудно-частотные характеристики преобразователей инерционного типа, работающие в режиме виброметра (a) перемещений и
акселерометра (б)
На рис. 29 (а) кривые характеризуют зависимость коэффициента
|
|
|
|
X |
|
|
|
|
p |
|
преобразования виброметра перемещения |
|
от |
отношения |
частот |
|
. |
||||
uk |
|
|||||||||
Условию |
X uk соответствует горизонтальный |
участок, |
к |
которому |
||||||
сходятся |
все кривые при |
p |
3 и D 1. При |
D 0,7 нижнюю |
границу |
|||||
|
||||||||||
|
|
|
|
|
|
|
|
|
||
диапазона измерения (с погрешностью преобразования около 5%) можно
расширить до значений |
p |
2 . Уменьшение относительного коэффициента |
|
|
|||
|
|
||
демпфирования D 0,4 |
нецелесообразно, поскольку демпфирование |
||
сокращает время переходного процесса, т. е. уменьшает влияние собственных колебаний преобразователя в начальный период.
Как показано на рис. 29 б, чувствительность измерительных систем,
|
X 2 |
|
работающих в режиме акселерометра, |
|
, также зависит от отношения |
|
||
|
uk |
|
p p
частот ; при = 0,1—0,2 условие (4.4) выполняется при любых значениях
D. Однако с увеличением частоты собственных колебаний преобразователя
1
существенно уменьшается масштаб преобразования (пропорционально 2 ),
поэтому применение в качестве акселерометров очень высокочастотных колебательных систем сопряжено со значительным снижением их
p
чувствительности. Наиболее протяженный (по оси ) участок постоянной чувствительности имеет место при значениях D=0,6—0,7; в этом случае
39
амплитудные искажения преобразователя ускорения не превышают 2%
вплоть до значений p 0,5.
В отличие от амплитудно-частотной, фазо-частотная характеристика подвижной системы акселерометра не имеет горизонтального участка. Если
значение |
|
p |
1 |
(режим акселерометра), |
колебания |
подвижной системы |
||
|
|
|||||||
|
|
|
|
|
|
|
||
преобразователя |
почти совпадают по фазе с колебаниями объекта; при |
|||||||
|
p |
1 |
(режим |
виброметра) они, как |
отмечалось, |
в противофазе с |
||
|
|
|||||||
|
|
|
|
|
|
|
||
направлением внешнего воздействия.
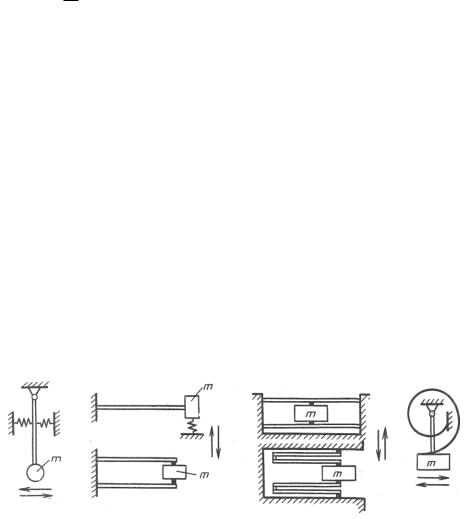
В качестве первичных преобразователей инерционного действия используются маятниковые системы и упругие подвесы. Конструктивные схемы таких колебательных систем с одной степенью свободы приведены на рис. 30. Варьируя жесткость пружин и изменяя массу m, можно в широких пределах изменять частоту собственных колебаний системы и режим работы преобразователя. Демпфирование колебаний обычно осуществляется за счет трения элементов подвижной системы о вязкую жидкость или электромагнитным способом.
Рис. 30. Схемы первичных преобразователей инерционного действия
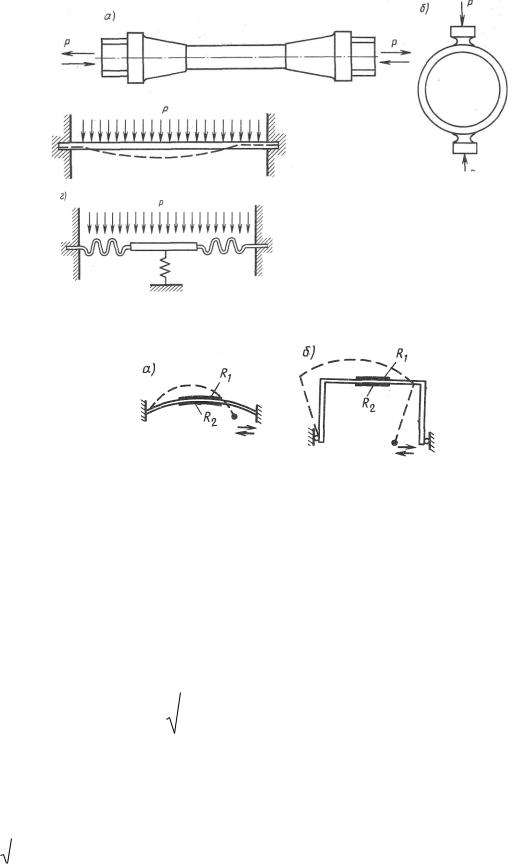
Механическая система преобразователей, реализующих кинематический принцип измерения, представляет собой упругие элементы в виде стержней, балочек, рам, пластин. На рис. 31 приведены схемы упругих элементов динамометров стержневого а и кольцевого б типов. Для восприятия распределенных нагрузок (давлений) применяют круглые пластины (b), защемленные по контуру, или упруго-подкрепленные мембраны (г). При измерении перемещений широко применяют упругие элементы арочного (рис. 32 а) и рамного (б) типа. Достоинством преобразователей, основанных на кинематическом принципе, является их универсальность: возможность измерения и динамических и статических величин.
40
Рис. 31. Схемы первичных преобразователей, реализующих кинематический принцип измерения
Рис. 32. Схемы первичных преобразователей арочного и рамного типов
Характеристики таких преобразователей обычно определяют в процессе статической градуировки. Оценку динамических погрешностей можно вы-
полнить следующим образом. Пусть внешнее воздействие изменяется по гар- |
|
моническому закону P t P0 sin pt, , |
аuk t 0. Тогда реакцию |
механической системы преобразователя на внешнее воздействие можно описать формулой
|
|
|
|
X t |
|
|
qp2 sin pt |
|
, где q |
|
p |
. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
2 p2 2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
4 p2 2 |
|
|
|
m |
|
|||||
|
Влияние на реакцию преобразователя частоты изменения внешней |
||||||||||||||||||||
силы |
|
|
можно |
|
охарактеризовать |
отношением |
|
|
X амп |
, |
где |
||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X ст |
|
||
X амп |
|
q |
|
|
|
|
|
|
- |
|
амплитуда |
колебаний в |
точке приложения |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
2 p2 2 4 p2 2 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
воздействия, а |
X |
|
p |
|
q |
|
- перемещение упругой |
системы |
преобра- |
||||||||||||
|
|
2 |
|||||||||||||||||||
|
|
|
|
ст |
|
k |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зователя при статическом действии силы Р, k— жесткость упругого элемента. Задавшись уровнем динамической погрешности, т, е. допустимым