

курсач ЭП
.pdfУравнения (4.50) и (4.51), полученные на основании схемы замещения
(рис. 4.3 б), показывают, что с ростом скольжения ток ротора монотонно воз-
растает, стремясь к предельному значению.
I / |
2 пред I1 |
|
|
|
X н |
|
I1 |
(4.52) |
|
Х |
н |
Х / |
2 |
||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
В тоже время, ток намагничивания Iμ непрерывно уменьшается, стре-
мясь к значению (рис. 4.15)
|
I |
|
|
I |
|
|
|
X / |
2 н |
|
0 |
(4.53) |
|
|
|
|
|
|
|
|
|
|
|||||
|
пр |
1 |
Х |
|
|
Х / |
|
||||||
|
|
|
|
н |
2 н |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как Х / |
2 н X |
н |
, ток Iμ весьма мал. Следовательно, при питании от |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИТ вследствие размагничивающего действия тока ротора Iμ и магнитный по-
ток машины Фμ изменяются при изменении скольжения в широких пределах.
|
I |
|
I2' ,I |
I ' |
1 |
|
|
2 пред |
|
||
|
|
|
I |
|
|
|
I ' |
|
|
|
2 |
I .пред |
Sa |
||
|
|
|
|
Рис. 4.19. Зависимости I2/ , Iμ(Sa) при питании АД от ИТ Приближенное линеаризованное уравнение механической
стики при S Sк1 при питании от ИТ запишется в виде
М (ТЭ1 1) 1 (0 ) ,
характери-
(4.54)
где Т |
|
|
1 |
|
|
|
Х н |
Х / |
2н |
; |
|
|
2 Mк1 |
. |
||
|
|
S |
|
|
|
|
|
|
||||||||
|
Э1 |
|
к1 |
|
|
R/ |
1 |
|
S |
к1 |
||||||
|
|
|
оэл.н |
|
|
оэл.н |
|
2 |
|
|
|
он |
||||
При изменении потока машины при питании от ИТ определяет боль-
шую инерционность, чем при питании от ИН,
61
где T |
1 |
|
|
|
|
( Х |
1н |
Х / |
) |
. |
|
|
|
|
|
|
|
2н |
|
||||
( |
S |
|
|
|
|
|
R/ |
|
|||
э |
к |
) |
|
о.эл.н |
|
|
|||||
|
о.эл.н |
|
|
|
|
2 |
|
|
|||
Структурная схема линеаризованной модели АД при питании от ИТ приведена на рис. 4.20.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f1 |
|
|
2 |
0 |
|
|
|
|
|
|
|
|
M |
|
|
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pП |
|
|
|
|
|
|
|
|
TЭ1 p 1 |
|
|
|
|
M с |
|
1TM1 |
p |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 4.20. Линеаризованная структурная схема АД при питании от ИТ
Здесь Т М 1 J – электромеханическая постоянная времени при питании
1
АД от ИТ.
4.3.6. Замкнутые системы ЧТУ при скалярном управлении
Для стабилизации магнитного потока при изменении нагрузки (сколь-
жения) используются замкнутые системы ЧТУ. Чтобы стабилизировать маг-
нитный поток двигателя, необходимо заданное значение тока I3Т .I 1 изменять при изменении нагрузки (абсолютного скольжения Sa ) по закону
I3T .I 1 I |
|
S 2 |
S |
|
|
|
|
|
к1 |
|
a |
. |
(4.55) |
||
|
Sк1 |
|
|||||
|
|
|
|
|
|
||
Зависимость тока (4.55) приведена на рис. 4.21.
62
|
|
I1 |
|
|
|
I1max |
|
|
|
|
|
I I1min |
|
I1н |
Sа |
|
|
|
|
0 н |
|||
Sн |
0 |
Sн |
|
|
|
|
|
|
|||
Рис. 4.21. Зависимость тока статора от скольжения АД |
|||||
Часто при технической реализации ФП пользуются линейной аппрок-
симацией зависимости I1 f ( Sa ) (штриховая линия рис. 4.17). Здесь значе-
ние I1 max определяет максимально допустимый ток статора, а I1 min – ток холостого хода АД.
Функциональная схема замкнутой системы ЧТУ со стабилизацией маг-
нитного потока представлена на рис. 4.22.
~
ЗИ |
|
|
|
|
|
|
|
|
|
U |
|
f1 |
|
|
|
U |
|
|
|
U3 f 1 |
|
|
|
|
уf |
|
|||
|
|
|
|
|
|
ЗЧ |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
t |
ФП1 |
|
0 н |
|
|
|
|
ПЧ |
|
|
|
|
|
|
|
|
|
(ИН) |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
I |
|
U |
|
|
||
|
|
|
ЗТ I |
уI |
1 |
||||
|
|
|
ФП2 |
1 |
РТ |
|
|
||
|
|
|
|
|
|
|
|
||
|
|
Sк 1 |
I |
|
I1 |
|
|
|
|
|
|
|
|
|
|
ДТ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АД |
|
|
|
|
|
|
|
ДС |
|
|
M |
Рис. 4.22. Функциональная схема ЧТУ со стабилизацией магнитного потока
63
Здесь функциональный преобразователь ФП1 выдает задание синхрон-
ной угловой скорости ω0 АД в соответствии заданной частотой f1, а ФП2 реа-
лизует зависимость (4.55) на основании вычисления значения о и
вводимых параметров Iμ ,Sк1 ,ωон. В результате задаваемая величина тока ста-
тора I3Т I1 изменяется с изменением нагрузки ( Sa ), обеспечивая стабилиза-
цию магнитного потока.
Для расширения диапазона регулирования скорости АД применяют замкнутые системы регулирования ЧТУ с обратной связью по скорости
(рис. 4.23).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
U зс |
U |
U |
|
1 |
РС |
U |
рс |
БО |
UБО |
|
ОЗ |
2 |
|
U у f1 |
|
с |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ФП |
|
|
|
ЗЧ |
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
Uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UСУ |
|
ПЧ |
|
|
|
|
|
|
|
|
|
|
|
0 н |
|
|
3 |
|
(ИН) |
|
|
|
|
|
|
|
|
|
|
IЗТ I |
|
|
U уI1 |
||
|
|
|
|
|
|
|
|
|
|
1 |
|
РТ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
ФП2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Sк 1 |
I |
|
|
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДТ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СУ |
|
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДС |
М |
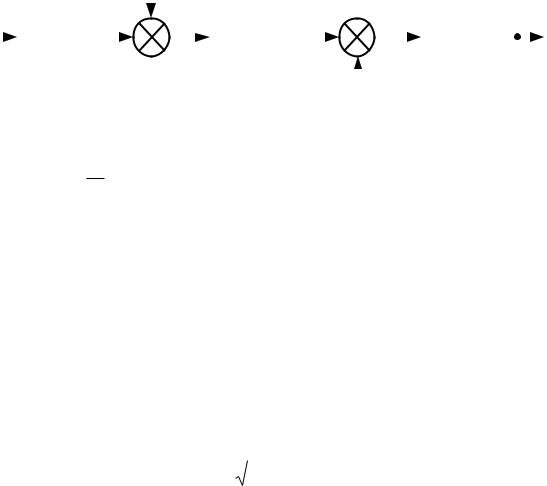
Рис. 4.23. Функциональная схема ЧТУ с обратной связью по скорости
Сигнал пропорциональный Sa формируется на выходе РС, так как на его входе Σ1 сравниваются сигналы задания Uc и сигнала обратной связи по скорости Uoc, пропорциональные ωоз и ω, то есть U pc (Uc Uoc ) ( оз ) Sa он . При выборе передаточного коэффи-
циента функционального преобразователя частоты скольжения (ФП) таким образом, чтобы с учетом ωон, его выходной сигнал был пропорционален
(ωоз – ω), то после суммирования с сигналом Uсу согласующего устройства
64

СУ, пропорционального ω, на выходе Σ2 устройства задания частоты ЗЧ бу-
дет сформирован сигнал определяющий задание синхронной скорости АД.
U yf 1 Uфп Ucy ( оз ) оз .
При работе на линейном участке механической характеристики момент двигателя пропорционален квадрату тока статорной обмот-
ки ( М I12 ), который в свою очередь пропорционален абсолютному сколь-
жению ( I12 Sa ) [8], выходной сигнал РС пропорционален Sa и является сигналом задания электромагнитного момента двигателя. Поэтому полка блока ограничения (БО) ограничивает величину максимального момента АД.
Перед пуском двигателя Uc 0 , U рс 0 , U yf 1 0 и за счет характери-
стики ФП2 задается постоянный ток Iμ, обеспечивающий режим динамического торможения АД. С увеличением Uс растет сигнал задания частоты, ток статора становится переменным, и АД начинает вращаться под действием максималь-
ного момента, устанавливаемого БО или темпом задания скорости с ЗИ.
Структурная схема линеаризованной системы ЧТУ с обратной связью по скорости приведена на рис. 4.24.
|
БО |
U ЗС |
UС |
|
WРС |
|
UОС |
СУ - ПЧ 0 |
|
M |
M с |
1 |
|
КСУ-ПЧ |
|
||||
TЭ1 p |
1 |
|
1TM 1 p |
|
|
|
|
|
|||
КОС |
|
|
|
|
|
Рис. 4.24. Структурная схема системы ЧТУ с обратной связью по скорости
Передаточная функция системы управления преобразователя частоты
(СУ-ПЧ)
|
W ( p) |
|
|
2 k f 1 |
k |
|
k |
|
, |
|
o |
|
СУ |
СУ ПЧ |
|||||
|
Uc |
pП |
|||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
где |
– передаточный коэффициент ПЧ; |
|
|
||||||
65
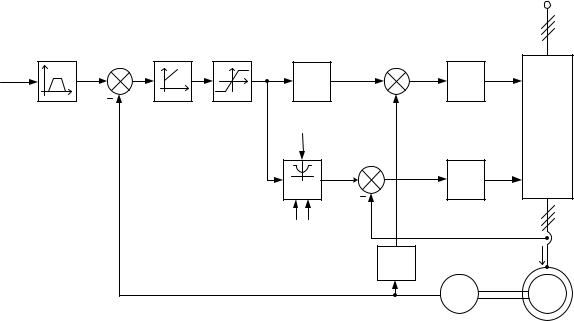
– коэффициент передачи системы управления; Uсн – задающий
сигнал при f1н на выходе ПЧ;
K Uoc – коэффициент обратной связи по скорости.
oc
При m TM 1 4 передаточная функция регулятора скорости при на-
TЭ1
стройке на ТО примет вид
Wpe |
T1 |
|
1 |
, |
|
TИ |
Т И р |
||||
|
|
|
где Т1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
; Т |
И КСУ ПЧ Кос ас Т . |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
4 ТЭ1 |
|
||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
2 ТЭ1 |
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М 1 |
|
|
|
|
|
|||||||
|
При m<4 АД представляет собой колебательное звено с передаточной |
|||||||||||||||||||||||||||
функцией W( p ) |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
и коэффициентом затухания |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
( T |
Т |
|
р2 Т |
|
р 1 ) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
М 1 |
|
|
Э1 |
|
|
|
|
|
|
М 1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
ТМ 1 |
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ТМ 1 ТЭ1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
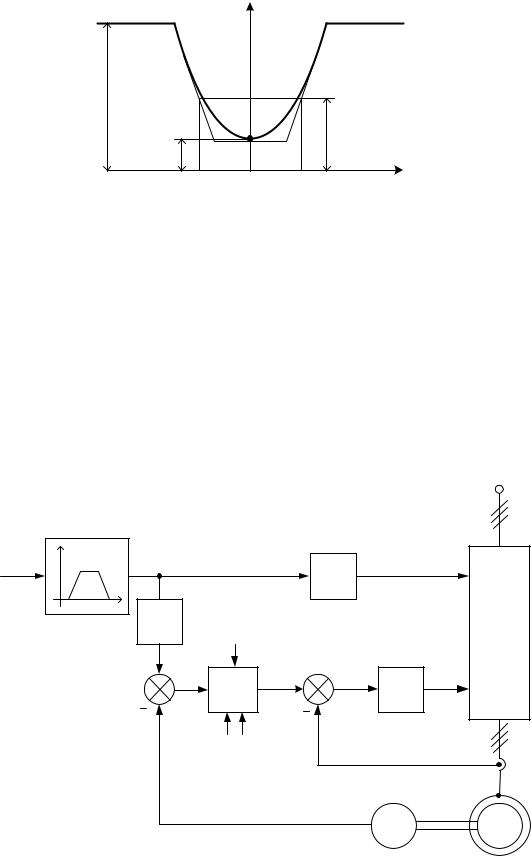
Тогда при неучтенной обратной связи по противо – ЭДС АД, структур-
ная схема линеаризованной модели АД примет вид (рис. 4.25).
U ЗС |
|
|
|
|
|
|
WРС |
|
|
|
К |
|
ПЧ |
|
|
|
|
|
|
|
|
|
|
|
|
|
СУ |
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
ТЭ |
p 1 |
|||
|
|
|
|
UОС |
|
|
|
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||
M с
M
KОС |
1TM1 p
Рис. 4.25. Линеаризованная схема системы ЧТУ без обратной связи по противо – ЭДС АД
Для данной схемы передаточная функция объекта регулирования
Wop |
( p) |
|
KСУ ПЧ |
|
(4.56) |
|
(ТЭ1 |
р 1) Т |
М 1 р |
||||
|
|
|
66
При отнесении ТЭ1 к некомпенсируемой Т Т Э1 и настройке контура
регулирования на ТО передаточная функция объекта регулирования примет вид
Wрс ( p) К рс |
|
|
ТМ 1 |
|
, |
(4.57) |
КСУ ПЧ |
Кос ас Т |
|
||||
|
|
Э1 |
|
|||
где ас 2 .
Выражение для статической механической характеристики при S Sк
и применении П – регулятора скорости, с учетом противо – ЭДС двигателя,
примет вид
оз |
М |
, |
(4.58) |
|
|||
|
зс |
|
|
где оз |
|
|
U зс К рс |
КСУ ПЧ |
, |
|
Кос К |
рс КСУ ПЧ |
|||
|
1 |
|
|||
зс 1 (1 Кос К рс КСУ ПЧ ) – скорость холостого хода и жесткость меха-
нической характеристики в замкнутой системе.
При неучете противо – ЭДС, согласно структурной схеме рис. 4.25
|
|
|
|
|
|
|
|
|
|
|
оз1 |
|
М |
, |
(4.59) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зс1 |
|
|
где |
|
|
U зс |
, |
|
|
|
К |
|
К |
|
К |
|
|
. |
|
|
|
оз1 |
|
ЗС1 |
ОС |
РС |
СУ ПЧ |
|
|
|
||||||||||
|
|
Кос |
|
1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Так как электромеханическая постоянная времени Т М 1 |
для электропри- |
||||||||||||||||
водов малой и средней мощности при питании от источника тока заметно меньше, чем при питании от источника напряжения, а значение коэффициен-
та усиления П – регулятора скорости KРС мало, следовательно, жесткость ме-
ханической характеристики невелика.
Более высокая точность регулирования обеспечивается при настройке контура на симметричный оптимум с ПИ-регулятором скорости. В этом слу-
чае передаточная функция ПИ-регулятора скорости примет вид
Wрс |
|
ТТ1 p 1 |
, |
(4.60) |
|||
Т И .Т1 |
р |
|
|||||
|
|
|
|
||||
где ТТ1 4 ТЭ1 ,
67

|
|
И .Т1 |
8 К |
СУ ПЧ |
К |
ос |
Т 2 |
|
|
||||
|
Т |
|
|
|
Э1 |
. |
|
|
|||||
|
|
|
ТМ 1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
При ПИ-регуляторе скорости выражение для статической механиче- |
||||||||||||
ской характеристики имеет вид |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
оз |
сonst, |
(4.61) |
||
где |
|
|
U зс |
– скорость идеального холостого хода в замкнутой системе ре- |
|||||||||
оз |
Кос |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
гулирования.
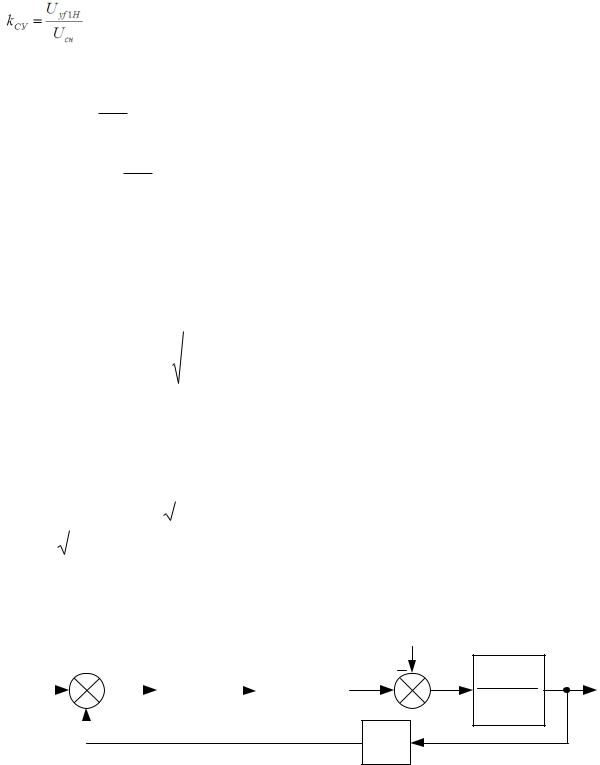
В системах ЧТУ для каждой фазы задаются мгновенные значения сину-
соидальных токов статора, которые отрабатываются быстродействующими ре-
гуляторами тока, включающими компаратор с гистерезисом (КГ). Амплитуда этих токов регулируется в соответствии с рассмотренными структурами ЧТУ.
Отслеживание заданной кривой тока осуществляется с точностью оп-
ределяемой верхней и нижней границами (рис. 4.26 б). Недостатком данной функциональной схемы является переменная частота коммутации силовых ключей ПЧ. При заданных границах колебания тока может оказаться, что частота коммутации ключей ПЧ превышает допустимую. Поэтому применя-
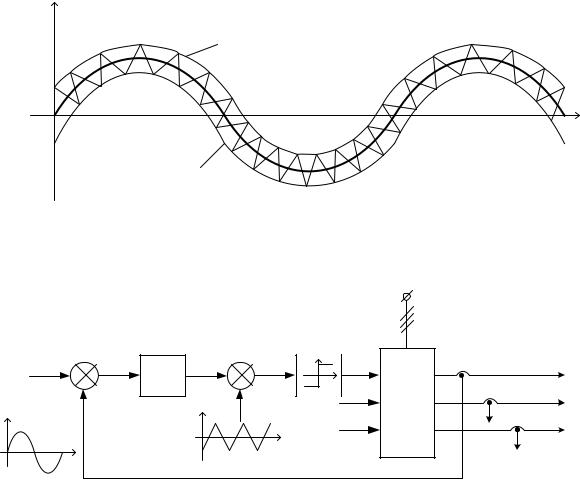
ют другую схему (рис. 4.27), где частота коммутации ключей постоянная.
Она определяется частотой сигнала пилообразного напряжения и выходного сигнала ПИ-регулятора тока РТ. Разность этих сигналов поступает на компа-
ратор без гистерезиса КБГ.
i |
|
iа |
КГ |
ДТ |
|
|
|
|
|
|
|||
3.а |
- |
|
|
ДТ |
|
|
i3.а |
iа |
|
|
|
||
|
|
|
|
|
||
t |
|
ПЧ |
|
|
к АД |
|
|
|
|
ДТ |
|||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
а)
68
iа |
Верхняя |
граница |
t |
0 |
Нижняя |
граница |
б) |
Рис. 4.26. Формирование кривой тока при ЧТУ: а) функциональная схема, |
б) кривая тока |
|
|
|
РТ |
|
КБГ |
|
|
|
i3.а |
|
iа |
|
|
ДТ |
|
|
|
|
ПИ |
|
|
|
|
|||
|
|
|
|
|
ДТ |
|
|
|
|
- |
iа |
|
- |
ПЧ |
|
к АД |
|
|
|
|
|
|||||
i3.а |
|
|
|
|
ДТ |
|||
|
|
|
|
|
|
|
||
|
t |
|
|
|
|
|
|
|
0
Рис. 4.27. Формирование кривой тока при постоянной частоте коммутации
69

5. Системы полярного и векторного управления асинхронными
двигателями
Рассмотренные системы скалярного частотного и частотно-токового управления АД обеспечивают хорошее качество регулирования в установив-
шихся режимах. Для многих механизмов с умеренными требованиями к ди-
намике (особенно инерционных и небыстродействующих механизмов) ска-
лярные системы управления, как более простые и дешевые, являются разум-
ным техническим решением применения регулируемого электропривода.
У механизмов с высокими требованиями к динамике (роботы, станки с ЧПУ,
следящие системы) для обеспечения максимального быстродействия требу-
ется поддержание постоянства магнитного потока АД в динамических режи-
мах. Достичь этого можно в системах полярного и векторного управления.
Особенно существенны изменения магнитного потока в динамике в системах ЧТУ. Здесь для постоянства магнитного потока в динамике необходимо не только изменять амплитуду, но и корректировать фазу вектора тока статора.
Из рассмотренных выше систем частотного управленияC1 const , const, 2 const, на практике наибольшее применение получили системы с поддержанием 2 const, обеспечивающие получение линейной механической характеристики АД.
При ориентации вектора потокосцепления 2 по оси х (рис. 5.1) полу-
чим структурную схему, на базе которой строятся системы векторного управления АД, имеющие широкое применение в практике электропривода.
В этом случае, как видно из рис. 5.1, вектор приведенного тока ротора i2' y пойдет вдоль оси у. При таком расположении векторов 2' перпендику-
лярно 2 и i1 y перпендикулярно 2 , электромагнитный момент определяется
произведением 2 i1 y .
70