

курсач ЭП
.pdfi |
|
3 |
i |
;i |
|
1 |
|
( i |
i |
) |
(5.31) |
|
|
|
|
|
|||||||||
|
|
|||||||||||
1 |
|
2 |
1A |
1 |
|
2 |
|
1B |
1C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Двухфазная |
|
|
Трёхфазная |
|
|
|
|
|
|
|
|
система |
|
|
|
||
|
|
|
|
|
|
|
система управления |
|
|||
|
|
|
|
Постоянный ток |
управления |
|
|
||||
|
|
|
|
i3 А |
|
|
|||||
|
Из |
|
|
i3.1 х |
|
i3.1 |
|
|
|
||
системы |
|
i3.1 у |
КП2 |
i3.1β |
П2/3 |
i |
|
ПЧ |
АД |
||
управлени |
|
|
3 В |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
i3С |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
В систему |
i |
|
|
|
i1 |
|
|
iА |
|
|
|
1 х |
|
|
|
|
|
iВ |
|
|
|||
управлени i1 у |
|
КП1 |
|
i1 |
П3/2 |
|
|
|
|||
|
|
|
iС |
|
|
||||||
я |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
cos 0 |
|
|
|
|
|
|
|
|
|
ГСК |
sin |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||
Блок |
Блок фазных |
координатных |
преобразован |
преобразований |
ий |
Рис. 5.21. Структура преобразования координат
Переход от осей – к x–y осуществляется в блоке координатных пре-
образований КП1 с помощью формул прямого преобразования (5.31).
|
i1 cos 0 i1 sin 0 ; |
|
||
i1x |
|
|||
i1y |
i1 sin 0 i1 сos 0 ; |
(5.32) |
||
|
|
|
t. |
|
|
0 ЭЛ |
|
||
0 |
|
|
|
|
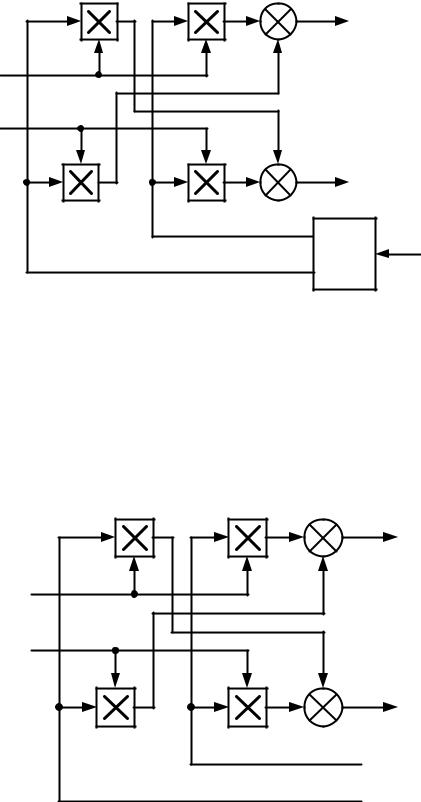
Функциональная схема блока КП1 приведена на рис. 5.22.
101
|
i1х |
|
|
+ |
|
|
|
i1 |
|
|
|
i1 |
|
|
|
|
i1 у |
|
|
cos 0 |
|
0 |
|
sin 0 |
ГСК |
||
|
Рис. 5.22. Функциональная схема блока КП1 |
|
|||||||
В прямом канале на основании формул обратного преобразования |
||||||||
(4.41) в блоке КП2 осуществляется переход от осей x–y к осям – . |
|
|||||||
i |
i |
сos |
0 |
i |
sin |
; |
|
|
1 |
1х |
|
1у |
0 |
|
|
(5.32) |
|
|
i1х sin 0 |
i1у сos 0 . |
|
|||||
i1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
Функциональная схема блока БКП2 приведена на рис. 5.23. |
|
|||||||
|
|
|
|
|
|
|
i1 |
|
i1х |
|
|
|
|
|
|
|
|
i1 у |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
i1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos 0 |
|
|
|
|
|
|
|
|
sin 0 |
|
Рис. 5.23. Функциональная схема блока БКП2 |
|
|||||||
В фазном преобразователе П2/3 осуществляется переход от осей – |
||||||||
двухфазной машины к параметрам трехфазной машины в осях А,В,С соглас- |
||||||||
но формулам (4.46). |
|
|
|
|
|
|
|
|
102

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
i |
|
; |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
1А |
|
|
3 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
i |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
i |
; |
(5.33) |
|||
|
|
|
|
|
|
|
|||||||||||||||
|
1В |
|
|
3 |
|
|
|
|
|
2 |
|
1 |
|
2 |
|
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
3 |
|
|
||||||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
i |
|
|
i |
. |
|
||||||||||
|
|
|
|
|
|
||||||||||||||||
|
1C |
|
|
3 |
|
|
|
|
|
2 |
|
1 |
|
2 |
|
|
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Если в качестве АД используется двухфазный асинхронный двигатель,
необходимость в фазных преобразованиях отпадает.
5.5.2.Система регулирования скорости и момента электропривода
свекторным управлением асинхронного двигателя при определении по-
токосцепления ротора по модели потока
Установка датчиков Холла для измерения магнитного потока в воз-
душном зазоре АД в системах прямого векторного управления требует до-
полнительных изменений в конструктивных решениях серийно выпускаемых АД и сопровождается снижением надежности электропривода. Поэтому в со-
временных и наиболее совершенных частотно-регулируемых электроприво-
дах, в которых системы управления реализованы на основе микропроцессор-
ной техники, используются в основном системы косвенного векторного управления. В данных «бездатчиковых» системах информацию о векторе по-
токосцепления ротора 2 АД получают косвенным путем на основании его математической модели.
Недостатком косвенного векторного управления является зависимость точности его реализации от точности определения параметров, которые из-
меняются с изменением температуры, частоты, величины тока и насыщения магнитной цепи АД. Из-за неточности определения параметров и их зависи-
мости от условий работы АД характеристики двигателей при косвенном– векторном управлении могут существенно отличаться от заданных. Поэтому в современных системах косвенного векторного управления вводятся уст-
103
ройства идентификации параметров на основе паспортных данных двигателя и автоматической их подстройки в процессе работы АД. Данное обстоятель-
ство несколько снижает преимущества систем косвенного векторного управ-
ления, но развитие современного частотно–регулируемого электропривода идет именно в этом направлении.
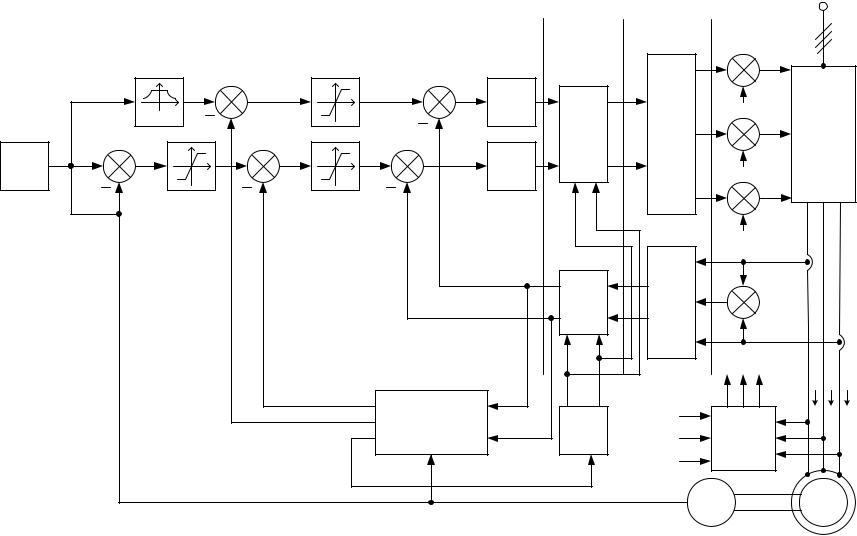
Функциональная схема системы регулирования момента и скорости АД при определении потокосцепления ротора на модели потока приведена на рис. 5.24. Система управления состоит из трех основных блоков: блока фаз-
ных преобразований (БФП) – преобразователи П2/3 и П3/2; блока коорди-
натных преобразований (БКП) – преобразователи КП1, КП2; блока регулято-
ров (БР) – регуляторы РТх, РТу, РП, РМ и РС. На входах регуляторов токов РТх, Рту сравниваются сигналы задания токов iЗ.1x и iЗ.1y с истинными значе-
ниями токов i1x, i1y с выхода КП1. Выходные сигналы регуляторов токов UЗ.1x,
UЗ.1y являются сигналами задания напряжения инвертора UЗA, UЗB, UЗC. На-
пряжения на выходе инвертора UA, UB, UC создают токи в статорных обмот-
ках двигателя iA, iB, iC, которые после их преобразования в П3/2 и КП1 во вращающуюся систему координат x – y служат сигналами обратной связи по току i1x, i1y.
Модель потока показана на рис. 5.25. На основании (5.8) получаемые в
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
модели значения потокосцепления ротора 2 |
и частоты роторной ЭДС р |
|||||||||||||||||
запишутся в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
2 |
L |
i1x ; |
Р |
K R/ |
|
L |
i1y , |
||||
|
|
|
|
|
|
|
|
|
ˆ |
ˆ |
||||||||
|
|
|
|
|
|
ˆ |
|
|
12 |
|
|
ˆ |
|
2 |
2 |
|
12 |
|
|
|
|
|
|
|
|
|
T2 |
p 1 |
|
|
2 |
|
T2 2 |
|
|||
|
T |
L2 |
; K |
|
|
L12 |
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
L . |
|
|
|
|
|
|
|
|
|
|
|||||
2 |
R/ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
При ориентации вектора потокосцепления по оси х его значение одно-
значно определяется составляющей тока по оси х, а частота ЭДС ротора со-
ставляющей тока по оси у.
104
105
3
ЗИ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
БР |
|
|
|
БКП |
|
|
|
|
БФП |
|
|
|
U1н , f1н |
||||||
ФП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U3 А |
|
|
|
||
|
РП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.2 |
|
|
i3.1х |
|
|
i3.1 х |
U3.1 |
|
|
|
|
|
e |
|
|
|
|
|
|
|||
|
|
|
РТX |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
РС |
|
|
|
|
|
|
|
КП2 |
|
П2/3 |
|
|
|
|
|
U3В |
|
ПЧ |
|
|||
|
РМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
М3 |
i |
|
|
|
i |
U |
|
|
|
|
|
|
eВ |
|
|
|
|
|
||||
|
3.1 у |
РТ |
|
3.1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
Y |
3.1у |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U3С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
eС |
|
|
|
U АU В UС |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iА |
|
|
|
|
|
|
|
|
|
|
|
|
i1х |
|
|
|
|
iВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1 у |
КП1 i1 |
П3/2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
i |
С |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos |
sin |
|
|
|
|
|
|
|
|
|
|
|
|
iА iВ |
iС |
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
е |
|
е |
|
|
|
||
ˆ |
ˆ |
|
|
|
|
|
|
|
|
|
|
А |
В |
|
|
|
|
|
||||
|
2 |
М |
|
|
|
|
|
|
|
iА |
|
|
|
С |
|
|
|
|
||||
|
|
|
|
Модель потока |
|
|
|
|
|
|
|
|
|
|
|
|
U А |
|
|
|||
|
|
|
|
|
|
|
ГСК |
|
iВ |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
БВЭ |
|
U |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|||||||||
|
|
|
0 |
|
|
|
|
|
|
i |
С |
|
|
|
|
|
|
|
UС |
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДС |
|
|
|
|
|
|
|
|
АД |
|
|
Рис. 5.24. Функциональная схема системы регулирования момента и скорости при векторном управлении АД

Кроме модуля потокосцепления ротора и частоты ротора в модели по-
тока рассчитывается текущее значение угла поворота 0 вращающейся сис-
темы координат x – y относительно связанной со статором неподвижной сис-
темы координат – , а также значение электромагнитного момента АД.
Сумма измеренного значения скорости, умноженного на число пар по-
люсов и рассчитанного в модели значения частоты ротора, определяет теку-
щее значение частоты на выходе ПЧ 0ЭЛ рП ˆ Р . Интегрирование этой величины в интеграторе И дает текущее значение угла 0. Это значение в ге-
нераторе синусоидальных колебаний (ГСК) определяет необходимые значе-
ния cos 0 и sin 0.
При ориентации 2 по оси х и расчете электромагнитного момента АД через амплитудное значение потокосцепления ротора и проекции вектора то-
ка по оси у, он рассчитывается по выражению
М 3 рП К2 2max I1y max . |
(5.34) |
Если 2 и i1y представляли собой проекции векторов, модули которых приняты равными эффективным (действующим) значениям величин, здесь
для определения значения момента необходимо использовать формулу
М 3 рП 2эф I1yэф . |
(5.35) |
В системе управления электропривода использована последовательная коррекция при введении подчиненных контуров регулирования. Внешним по отношению к контуру тока по оси х, является контур регулирования пото-
косцепления ротора с регулятором потока (РП). Выходной сигнал регулятора потока представляет собой сигнал задания i1x. На входе (РП) сравниваются
сигналы задания З 2 и истинное значение потокосцепления ротора 2 , рас-
считанное в модели потока. Внешним по отношению к контуру регулирова-
ния тока i1y является контур регулирования момента с регулятором (РМ). На его входе сравниваются выходной сигнал регулятора скорости (РС), который
106
задает значение электромагнитного момента MЗ, и сигнал обратной связи по
моменту ˆ , вычисленный в модели потока. Контур регулирования скорости
M
замкнут по сигналу ω на выходе датчика скорости (ДС).
В рассматриваемой схеме исключение влияния перекрестных связей
(см. рис. 5.2) обеспечивается путем использования быстродействующих кон-
туров регулирования токов i1x, i1y. Это позволяет рассматривать контур регу-
лирования потокосцепления ротора как не связанный с подсистемой регули-
рования момента, и делает возможным независимое регулирование потокос-
цепления ротора, как при регулировании потока возбуждения в двигателе по-
стоянного тока независимого возбуждения. Здесь имеет место возможность установки потока до того, как в контуре скорости будет подан сигнал задания и скорость АД равна нулю.
При реализации двухзонного регулирования скорости (рис. 5.24) в сис-
теме предусмотрен функциональный преобразователь (ФП). Сигнал на его входе определяется значением скорости. До тех пор пока скорость не превы-
шает номинального значения, сигнал на выходе (ФП) задает номинальный поток и остается постоянным. Когда скорость превысит номинальное значе-
ние, сигнал на выходе ФП будет уменьшаться и скорость, большая номи-
нальной, будет достигнута при ослаблении потокосцепления ротора при примерно постоянном значении напряжения на статоре АД.
На входе системы установлен задатчик интенсивности (ЗИ). При пода-
че на его вход сигнала задания скорости любой, например ступенчатой фор-
мы, изменение сигнала задания скорости на выходе происходит по линейно-
му закону, что обеспечивает плавный характер разгона и торможения элек-
тропривода.
Согласно с принципом подчиненного регулирования для ограничения выходной величины внутреннего (подчиненного) контура необходимо огра-
ничить выходной сигнал регулятора внешнего по отношению к нему конту-
ра. Поэтому для ограничения токов статора по осям x – y предельно допусти-
107

мыми значениями, в регуляторах потока (РП) и момента (РМ) предусмотрено ограничение входных сигналов i1x, i1y. Аналогично для ограничения момента двигателя ограничивается выходная величина регулятора скорости (РС).
Ограничение выходного сигнала регулятора внешнего контура вступа-
ет в действие, если в переходном процессе сигнал ошибки на его входе, пред-
ставляющий собой разность сигналов задания и обратной связи, станет недо-
пустимо большим, что привело бы к недопустимому увеличению выходной величины подчиненного контура. При наличии ограничения выходная вели-
чина регулятора внешнего контура остается постоянной, равной максималь-
ному значению до тех пор, пока ошибка на его входе не снизится до значе-
ния, при котором регулятор выходит из зоны ограничения. Наличие ограни-
чения на регуляторах момента и скорости позволяет независимо ограничивать значения момента двигателя и тока статора по оси у.
При выборе значений ограничений токов i1x и i1y, следует иметь в виду,
что они должны быть выбраны таким образом, чтобы модуль полного тока
статора, определяемый как I1 
 i12x i12y , не превышал предельного допусти-
i12x i12y , не превышал предельного допусти-
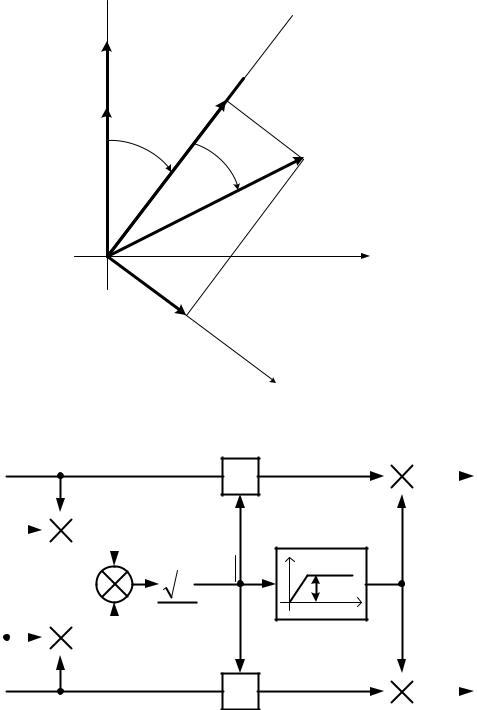
мого значения I1 огр. Это поясняет векторная диаграмма (рис. 5.26 а). На рис. 5.26 б приведена функциональная схема ограничения тока, обеспечи-
вающего ограничение сигналов задания токов статора по осям x–y таким об-
разом, что полный ток ограничивается на уровне I1 огр независимо от соотно-
шения между токами i1x и i1y.
108

 X
X
 2
2
0 1
i1x |
I 1 |
|
i1 у
Y
а)
i3' |
.1х |
|
|
( i' |
)2 |
|
|
|
|
||||
|
|
|
|
|
3.1х |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
i3' |
|
|
|
|
+ |
|
|
|
|||||
.1 у |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
( i' |
)2 |
|
|
|
|
|
||
|
|
|
|
|
3.1 у |
|
|
|
|
|
|
|
|
|



 I1' max
I1' max
|
cos 1 |
|
i3.1х |
|
||
|
|
|
I |
|
I1 |
огр |
I3.1 |
|
|
|
sin 1 |
|
i3.1 у |
|
||
|
|
|
б)
Рис. 5.26. Векторная диаграмма (а)
и функциональная схема блока ограничения тока статора (б)
109

Согласно рис. 5.26 а модуль задания тока статора будет равен
I1.огр 
 iЗ .1x 2 iЗ .1y 2 , т. е. независимо от соотношения сигналов на входе регуля-
iЗ .1x 2 iЗ .1y 2 , т. е. независимо от соотношения сигналов на входе регуля-
торов РП и РМ модуль полного тока всегда будет ограничен на уровне I1 огр.
В рассматриваемой системе регулирования режим предварительного намагничивания АД обеспечивается заданием составляющей тока i1x, форми-
рующей потокосцепление ротора раньше, чем будет задана составляющая i1y,
формирующая электромагнитный момент двигателя. В рассматриваемом блоке, при подаче сигнала задания 3.2 на вход контура регулирования пото-
косцепления, величина i1x ограничивается значением I1 огр, обеспечивая фор-
сированное нарастание потокосцепления. Тогда как при раздельном ограни-
чении токов i1x ,i1 y (рис. 5.26) величина i3.1x ограничивается меньшим значе-
нием, чем I1 огр, т.е. поток нарастает медленнее.
На вход схемы подаются входные величины с регуляторов РП и РМ,
которые, в этом случае, не имеют ограничения выходных величин i3.1x ,i3.1 y .
После возведения их в квадрат в блоке 
 рассчитывается текущее значение модуля тока статора I1 max и тригонометрическая функция угла между векто-
рассчитывается текущее значение модуля тока статора I1 max и тригонометрическая функция угла между векто-
ром тока статора I1 и осью x системы координат х – у.
|
|
|
|
cos 1 |
i |
3.1x |
, sin 1 |
|
i3.1 у |
|
. |
|
(5.36) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
I1 max |
|
|
|
|
I1 max |
|
|
|
|
|
|
|||||||
Сигналы на выходе блока ограничения i1x, i1y являются сигналами зада- |
||||||||||||||||||||||||||
ния для контуров регулирования тока. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
При |
|
I1 max |
|
I1.огр ,I1 |
|
I1max |
|
и i3.1x i'3.1x , i3.1 y |
|
|
i'3.1 y , т.е. блок ограни- |
|||||||||||||||
|
|
|
|
|||||||||||||||||||||||
чения не влияет на работу схемы. Если |
|
I1max |
|
I1.огр , |
|
то I1 I1огр , и выполняются |
||||||||||||||||||||
|
|
|
||||||||||||||||||||||||
равенства |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
i1x |
I1огр cos 1 |
|
I1огр |
|
|
i'3.1x |
|
|
|
|
|
|
; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
i'3.1x 2 |
i'3.1y |
2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i'3.1y |
|
|
|
|
(5.37) |
|||||
|
|
|
|
i1y |
I1огр sin 1 |
I1огр |
|
|
|
|
|
|
|
|
. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
i'3.1x 2 |
i'3.1y |
2 |
||||||||||||||||||||
110