

ТИП_лекции
.pdfНа практике применяют 3 схемы подключения ТПС в мостовую схему: 2-х проводную, 3-х проводную и 4-х проводную.
Количество проводов связано с погрешностью измеряемой t. Как правило, для соединения ТПС с измерительным прибором применяются медные провода, которые при изменении t окружающей среды изменяют свое сопротивление. Особенно это сказывается тогда, когда ТПС устанавливается на значительном расстоянии от измерительного прибора.
Для уменьшения или устранения влияния изменяющегося в процессе эксплуатации сопротивления соединенных проводов, на измеряемую t, и варьируют схемами подключения ТПС, включая провода в разные плечи мостовой схемы.
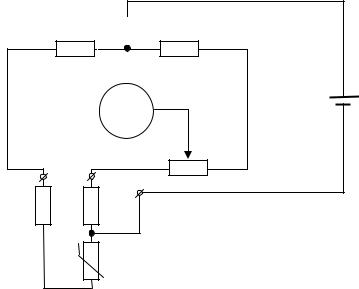
Двухпроводная схема подключения ТПС приведена на рис. 2.22.
R2 |
Д |
R1 |
|
|
|
|
|
|
|
С |
G |
А |
Б |
+ |
|
|
R3 |
|
– |
|
|
|
|
|
|
|
В |
|
|
Rл |
Rл |
|
|
|
|
RТ |
|
|
|
Рис. 2.22. Двухпроводная схема подключения ТПС:
Б – батарея, RТ – ТПС, R1, R2, R3 – резисторы (плечи моста), RЛ – резисторы для подгонки сопротивлений внешних линий
Если взять за основу уравнение равновесия (2.52), то можно доказать, что изменяя R3 можно добиться равновесия мостовой схемы, констатируя отсутствие тока гальванометром G. Уравнение равновесия этой схемы имеет вид:
R1 (RT 2 RЛ ) R2 R3 .
Поделим левую и правую части уравнения на R1. Тогда получим:
RT 2 RЛ R2 R3
R1
или
R |
R2 |
R |
2 R . |
(2.54) |
|
||||
T |
3 |
Л |
|
|
|
R1 |
|
|
|
Так как R1, R2, RЛ = Const, то можем записать, что |
|
|||
RT f (R3 ) . |
(2.55) |
|||
Точность измерения по методу уравновешенного моста при двух проводной схеме включения ТПС достаточно высока и практически не зависит от величины напряжения батареи Б. Это понятно из уравнения (2.54) , так как ни I ни U не входят в данное уравнение.
Неточность в работу этой схемы могут внести переходное сопротивление подвижного контакта сопротивления R3, а также изменение сопротивления соединительных проводов за счет изменения температуры окружающей среды. Эти недостатки отчасти исключаются при трех проводной схеме подключения ТПС.
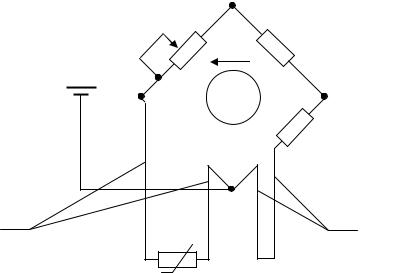
Трехпроводная схема подключения ТПС приведена на рис. 2.23.
R2 |
Д |
R1 |
|
|
+
С  G Б – r 3 r 3
G Б – r 3 r 3
|
А |
Rл |
Rл |
|
В |
|
RТ |
Рис. 2.23. Трехпроводная схема подключения ТПС
В данной схеме подвижный контакт не относится к плечу моста АВ, а включен в измерительную диагональ АС, сопротивление которой в момент отсчета при нулевом токе практически не имеет значения. Для уменьшения влияния температуры окружающей среды на сопротивление соединительных проводов питание моста перенесено непосредственно к ТПС.
Уравнение равновесия этой схемы имеет вид:
(R1 r3'' ) (RT RЛ ) R2 (RЛ r3' )
или
RT |
R |
|
'' |
|
|
R |
|
|
|
|
|
|
|
|
|
|
2 |
|
r3 |
|
|
2 |
|
1 |
|
RЛ . |
(2.56) |
||||
R |
r |
'' |
R |
r |
'' |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
3 |
|
1 |
3 |
|
|
|
|
|
|
||||
Из уравнения (2.56) |
видно, |
что |
при |
|
|
R2 |
|
1 |
сопротивление |
||||||
|
R |
r'' |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
|
|
3 |
|
|
|
ТПС не зависит от RЛ. Такое положение схемы будет соответствовать лишь одной точке шкалы. В других точках изменение RЛ будет вносить дополнительную погрешность, но на порядок меньшую, чем при двух-
проводной схеме, так как R1 и R2 значительно больше чем r3’’max
(r3’’max ≈ R3).
Четырех проводные схемы включения ТПС приведены на рис. 2.24
и2.25. Для подсоединения ТПС в мостовую схему используют компенсационную схему с двумя парами соединительных проводов.
Всхеме (рис. 2.24) ТПС и два провода образуют плечо моста R2 = RТ + 2RЛ, другое плечо состоит из постоянного сопротивления R0
идвух одинаковых проводов, т.е. R4 = R0 + 2RЛ.
Уравнение равновесия этой схемы имеет вид:
R1 (R0 |
2 RЛ ) R3 |
(RТ 2 RЛ ) . |
(2.57) |
|||||||
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
IГ |
R3 |
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
Б |
|
+ |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
– |
|
|
|
|
|
|
||
|
|
A |
|
B |
|
|||||
|
|
|
|
|
|
|||||
|
R0 |
|
|
Д |
R4 |
=R0 |
+2RЛ |
|
|||
RЛ |
|
RЛ |
|
R2=RТ+2RЛ |
|
|
|
RТ
Рис. 2.24. Четырехпроводная компенсационная схема включения ТПС
Из уравнения равновесия видно, что RЛ будут по обе стороны от знака равенства. Следовательно, изменение сопротивления соединительных проводов будут компенсировать друг друга.
Скомпенсировать влияние соединительных проводов можно при четырехпроводном включении ТПС с использованием нулевого метода.
В схеме (рис. 2.24) значение сопротивления RТ определяется по двум последовательным уравновешиваниям моста при двух различных включениях проводов. При первом уравновешивании концы проводов
соединяют согласно следующей маркировке: |
А к а; |
D к f; F к b. Мост |
|||
уравновешивают с помощью резистора R1, переменное сопротивление |
|||||
которого в положении равновесия R1 = R1’, т.е. уравнение равновесия |
|||||
будет иметь вид: |
|
|
|
|
|
R (R' |
2 R ) R (R 2 R |
Л |
) . |
(2.58) |
|
0 1 |
Л |
0 Т |
|
|
|
|
|
|
С |
|
|
|
|
|
|
R1 |
|
R3 |
=R0 |
|
|
|
|
|
I |
|
|
||
|
|
|
Г |
|
|
|
|
A |
a |
F |
G |
B |
Б |
+ |
|
|
|||||||
|
b |
|
e |
|
|
|
– |
|
|
R4= R0 |
|
|
|||
|
|
|
f |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
RЛ |
|
|
|
RЛ |
|
|
|
RТ
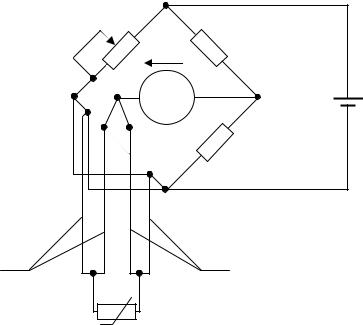
Рис. 2.25. Четырехпроводная схема включения ТПС по нулевому методу
При втором уравновешивании моста концы проводов переключаются следующим образом: А к f; D к a; F к е. При этом R1 = R1’’ и уравнение равновесия примет вид:
R (R'' 2 R |
) R |
(R |
2 R |
Л |
). |
(2.59) |
|
0 1 |
Л |
0 |
Т |
|
|
|
|
Сопротивление RТ ТПС вычисляется по результатам двух уравновешиваний схемы, как среднее арифметическое:
R |
R' |
R'' |
|
|
1 |
1 |
. |
(2.60) |
|
|
|
|||
T |
|
2 |
|
|
|
|
|
|
|
2.17. АВТОМАТИЧЕСКИЕ ЭЛЕКТРОННЫЕ МОСТЫ
Автоматические мосты предназначены для измерения температуры в комплекте с ТПС стандартной градуировки. Чаще всего автоматические мосты бывают показывающие и регистрирующие.
Внешние цепи |
|
|
|
|
|
y=f(t) |
|
|
|
RР |
Д |
|
|
|
|
||
|
|
RН.Р. |
|
|
|
СД |
||
|
|
RШ |
|
|
|
|||
|
|
RПР |
|
|
|
|||
|
|
|
|
|
|
|
||
|
RЛ |
RН |
RП |
|
R3 |
РУ |
|
|
|
|
|
|
РД |
||||
|
|
|
|
|
|
|
|
|
RТ |
IТ |
|
|
|
|
|
ЭУ |
UУ |
|
|
6,3В |
|
RБ |
|
|
||
Б |
|
|
|
|
В |
|
||
RЛ |
R1 |
|
|
|
R2 |
|
||
|
|
А |
|
UНЕБ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АЭМ |
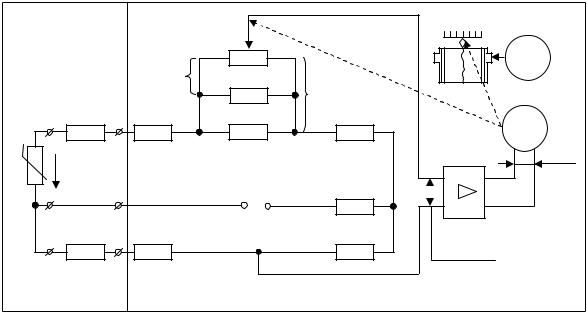
Рис. 2.26. Измерительная схема автоматического электронного моста
На рис. 2.26 приняты следующие обозначения: RP – рео-
хорд,
RШ – шунт реохорда, предназначенный для подгонки сопротивления
реохорда до нормированного значения, R |
|
|
RР RШ |
– нормирован- |
||||
|
|
|||||||
|
|
|
|
НР |
|
RР RШ |
|
|
ное значение реохорда, |
RП – резистор для |
|
|
|
||||
установки |
верхнего преде- |
|||||||
ла измерения, |
R |
|
RНР RП |
– приведенное сопротивление рео- |
||||
|
||||||||
|
ПР |
|
RНР RП |
|
|
|
|
|
|
|
|
|
|
|
|
||
хорда,
RН – резистор для установки нижнего предела измерения моста, R1, R2, R3 – постоянные резисторы, плечи моста, RБ – балластный резистор в цепи питания, предназначенный для ограничения тока в плечах моста и обеспечения минимального значения IТ (IТ = 5 ÷ 10 мА, в противном случае возникает погрешность от самонагрева), RЛ ≈ 2,5 Ом, со-
противление внешних линий, РД –реверсивный двигатель, СД – синхронный двигатель, предназначенный для передвижения диаграммы, ЭУ – электронный усилитель.
Условие равновесия мостовой схемы, есть отсутствие напряжения в измерительной диагонали АД, т.е. UНЕБ 0, или произведение
сопротивлений противоположных плеч моста должны быть равны между собой. Уравнение равновесия измерительной схемы автоматического моста будет иметь вид:
(R1 RЛ ) (R3 m RПР ) R2 RТ RЛ RН (1 m) RПР . (2.61)
где тRПР – приведенное сопротивление реохорда правее движка Д.
При изменении температура измеряемой среды изменяется значение сопротивления RТ, нарушается равновесие мостовой схемы, т.е.UНЕБ 0 . На вход ЭУ поступает напряжение небаланса UНЕБ , усили-
вается по мощности и напряжению и в виде напряжения UУ поступает
на управляющую обмотку РД. РД вращаясь в соответствующую сторону, перемещает одновременно стрелку (перо) РУ и движок реохорда,
меняя значение RПР до тех пор, пока UНЕБ 0 .
Типы автоматических мостов КПМ – комплекс показывающих и КСМ1(2,3,4) – комплекс самопишущих приборов, А100Н, Диск 250, Технограф 100(160). Класс точности автоматических мостов по показаниям равен 0,25; 0,5.
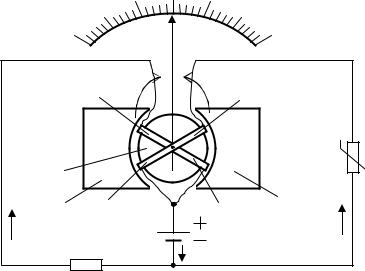
2.18. НАЗНАЧЕНИЕ, УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ЛОГОМЕТРА
Логометры предназначены для измерения температуры в комплекте с ТПС стандартной градуировки. Логометры – приборы магнитоэлектрической системы, подвижная система которых состоит из двух жестко скрепленных между собой рамок, расположенных под некоторым углом друг к другу. Выполняемые функции: показания, регулиро-
вание, сигнализация.
50
0 |
|
oC |
|
100 |
2 |
M2 |
M1 |
1 |
|
|
N |
|
S |
RT |
3 |
|
|
|
|
|
|
|
|
|
4 |
RР |
RР |
5 |
|
I1 |
U |
|
|
I2 |
|
I |
|
|
|
RRК |
|
|
||

Рис. 2.27. Упрощенная принципиальная схема логометра:
1,2 – рамки логометра с сопротивлениями RP и RP ; 3 – цилиндрический стальной сердечник; 4,5 – полюса постоянного магнита; RК – постоянный резистор,
включенный параллельно с RP ; RT – ТПС, включенный параллельно с RP
Между полюсами магнита и стальным сердечником существует неравномерный воздушный зазор, поэтому магнитная индукция в зависимости от положения рамок меняется, т.е. уменьшается при удалении рамок от центра магнита. Оба контура питаются от одного источника напряжения, поэтому колебания напряжения источника питания в пределах ± 20% не влияют на показания прибора, т.е. изменение напряжения питания в пределах ± 20% не дает погрешности измерения температуры.
Вращающие моменты рамок М1 и М2 равны:
М1 К1 В1 I1 ; |
М2 К2 В2 I2 ; |
(2.62) |
где К1 = К2 = ω·ℓ·b – постоянные коэффициенты, определяемые числом
витков ω и геометрическими размерами рамок ℓ и b; В1, В2 – магнитные индукции в местах расположения рамок;
I |
|
|
U |
|
, I |
|
|
|
|
U |
|
|
– токи, протекающие по соответствующим |
|||||||
1 |
R |
R" |
2 |
R R' |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
К |
P |
|
|
|
|
Т |
|
|
P |
|
|
контурам. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
В момент равновесия вращающие моменты равны между собой |
|||||||||||||||||
|
|
|
|
|
|
|
|
К1 В1 I1 |
= К2 В2 I2 , |
(2.63) |
||||||||||
или |
|
|
|
|
|
|
|
I1 |
|
K2 |
|
B2 K |
B2 . |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
I |
2 |
|
K |
1 |
|
B |
B |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|||
Подставив в это уравнение значения I1 и I2, получим: |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R'' |
R |
|
B |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
Т |
K |
|
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
R' |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
B |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
K |
1 |
|
|
||
Так как магнитная индукция В зависит от угла поворота под-
вижной части логометра φ, т.е. В = f(φ), то и отношение B2 = f(φ).
B1
Следовательно,
φ = f ( RP' RТ ).
RP" RK
Значения RK, RP’, RР’’ = Const, поэтому φ зависит только от значения
сопротивления RТ, т.е. |
|
φ = f(RТ). |
(2.64) |
Принцип действия. Если RP’ = RP’’ и RK = RT, то I1 = I2, следова-
тельно, и М1 = М2, при этом подвижная система находится в среднем положении. Предположим t стала больше tСР. В этом случае сопротивление RТ увеличится, I2 уменьшится, а М1 < М2. Подвижная система начинает двигаться вправо по схеме, при этом рамка 2 входит в зазор с меньшей магнитной индукцией, а рамка 1 входит в зазор с большей магнитной индукцией. Движение подвижной системы будет происходить до тех пор, пока вновь М1 = М2 за счет изменения магнитных индукций.
R3 |
|
R4 |
R2 |
|
|
R5 |
|
R Р |
|
R Р |
|
R6 |
|
|
R1 |
|
RК |
|
|
|
|
|
Логометр |
1 |
2 |
3 |
4 |
Rл |
|
Rл |
4B |
|
|
||
RТ |
|
|
ТПС |
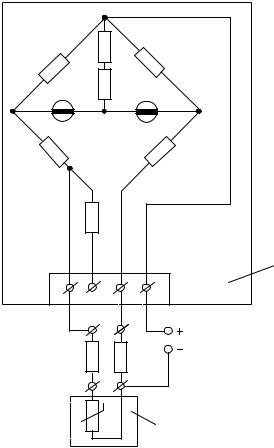
Рис. 2.28. Полная принципиальная схема логометра
Для повышения чувствительности в схемах логометра рамки RP’ и RP’’ включаются в измерительную диагональ неуравновешенного моста, состоящего из постоянных манганиновых сопротивлений R1, R2, R3 и R6. Манганиновый резистор R4 служит для увеличения угла поворота подвижной системы, а медный резистор R5 служит для температурной компенсации. Сопротивления для подгонки внешних линий ло-
гометра RЛ ≈ 2,5 Ом, так как суммарное сопротивление внешних линий логометра составляет 5 Ом. Калиброванное сопротивление RК, предназначено для контроля правильности подгонки сопротивлений RЛ и исправности самого логометра. Для этого клеммы 1 и 3 закорачивают, а питание подают на клемму 2, при этом стрелка логометра должна установиться на красную контрольную отметку.
Типы логометров Л–64, Л–64–02, МВУ6–42, Ш69000 и т.п. Класс точности логометров равен 1,5.
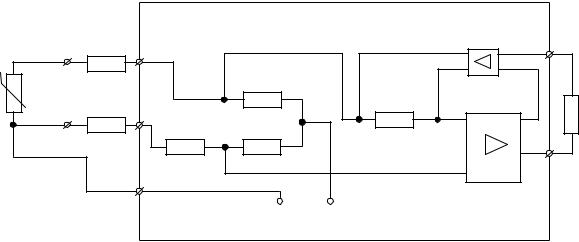
2.19. НОРМИРУЮЩИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Нормирующие измерительные преобразователи предназначены (НИП) для преобразования выходного сигнала термоэлектрических преобразователей и термопреобразователей сопротивления в унифицированный сигнал постоянного тока IВЫХ = 0÷5, 0÷20, 4÷20 мА или напряжения 0 ÷ 10 В.
|
|
|
|
|
IОС |
УОС |
t0 |
|
|
|
|
UОС |
|
|
|
|
|
UX |
RН |
|
|
E(t,t0) |
|
|
|
|
|
t |
|
|
|
RО |
U |
|
t0 |
а |
R1 |
МК |
R2 |
b |
IВЫХ |
|
|
|
|
|
|
RМ |
R3 |
|
|
– |
UПИТ |
+ |
НИП |
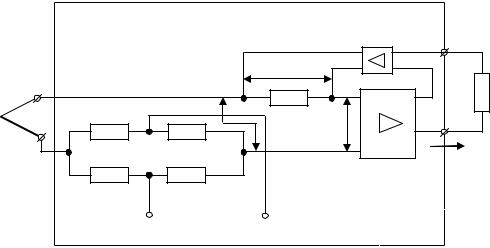
Рис. 2.29. Принципиальная схема нормирующего измерительного преобразователя для работы в цепи с ТЭП
В данной схеме сопротивление нагрузки RН = 2,5 кОм представляет собой не что иное, как измерительный прибор, например, типа КПУ, КСУ, А100, т.е. прибор с унифицированным входным токовым сигналом, регулятор или контроллер.
Преобразователь состоит из корректирующего моста МК, усилителя с токовым выходом IВЫХ, устройства обратной связи (УОС) и резистора обратной связи RОС. Резисторы МК выполнены из манганина, за исключением RМ, который изготовлен из меди, располагается вблизи холодных концов ТЭП и вносит автоматически поправку на температуру свободных концов ТЭП, т.е. на t0.
Преобразователь выполнен по статической автокомпенсационной схеме. Выходной сигнал ТЭП, скорректированный напряжением Uab, снимаемым с вершин моста ab в виде напряжения
UX E(t,t0 ) Uab ,
сравнивается с напряжением обратной связи UОС. Не скомпенсированный сигнал
U UX UOC
усиливается усилителем с токовым выходом.
Выходной ток IВЫХ поступает во внешнюю цепь RН и через делитель подается в УОС. Токи на выходе и входе УОС строго пропорциональны между собой. Выходной ток устройства обратной связи IОС создает на RОС сигнал обратной связи
UОС IOC ROC KOC ROC IВЫХ,
где КОС – коэффициент передачи устройства обратной связи. Для усилителя с обратной связью
IВЫХ КУ ( U KOC ROC IВЫХ) , |
(2.65) |
|||||||
где КУ – коэффициент передачи усилителя. |
|
|||||||
Преобразуя уравнение (2.65) относительно IВЫХ, получим: |
|
|||||||
IВЫХ |
|
|
КУ |
|
U К U , |
(2.66) |
||
|
|
|
|
|
||||
|
|
1 КУ КОС RОС |
|
|||||
где К – коэффициент передачи всего НИП. |
|
|||||||
Отношение |
|
|
КУ |
|
Const . При большом значении |
|||
1 К |
К |
ОС |
R |
|||||
|
|
У |
|
ОС |
|
|
|
|
КУ, т.е. при КУ → ∞, коэффициент передачи всего НИП будет равен
К |
|
|
1 |
, а его стабильность будет определяться стабильностью |
К |
ОС |
R |
||
|
|
ОС |
|
КОС и RОС.
Типы НИП для работы в цепи с ТЭП: Ш–78, Ш–705, П–282,
Ш9322, ИП–Т10 и т.п.
|
|
|
|
УОС |
RЛ |
а R1 |
|
IОС |
|
|
RОС |
|
||
RТ |
МИ |
|
RН |
|
RЛ |
b |
|
|
|
R2 |
|
|
IВЫХ |
|
R3 |
|
|
||
|
– |
+ |
|
НИП |
|
UПИТ |
|
|