

m315
.pdfI0/ = |
U1Н |
|
, А; |
|
P0/ = U1Н I0/ cosϕ0/ , Вт. |
(3.1.7) |
||||||
|
|
|||||||||||
|
Z0/ |
|
|
|
|
|
|
|
0С и испыта- |
|||
Параметры короткого замыкания при температуре θ0 |
||||||||||||
тельном напряжении U1К , Ом: |
|
|
|
|
|
|
|
|||||
Z |
К |
= |
U1К |
; |
r |
= Z |
К |
cosϕ |
К |
. |
(3.1.8) |
|
|
||||||||||||
|
|
|
I1К |
|
К |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметры и фазные электрические величины короткого замыкания двигателя при испытательном напряжении и рабочей температуре:
ZК/ = |
r2 |
+ xК2 , Ом; |
|
cosϕК/ |
= |
rК750 C |
; |
(3.1.9) |
||||
|
Z / |
|||||||||||
|
|
К750 C |
|
|
|
|
|
|
|
|
||
|
|
|
U1К |
|
|
|
|
2r |
|
К |
|
|
I |
/ |
= |
, А; |
P/ |
= I |
/ |
|
, Вт. |
(3.1.10) |
|||
|
|
|||||||||||
|
1К |
/ |
|
К |
|
1К |
К750 C |
|
|
|||
|
|
|
ZК |
|
|
|
|
|
|
|
|
|
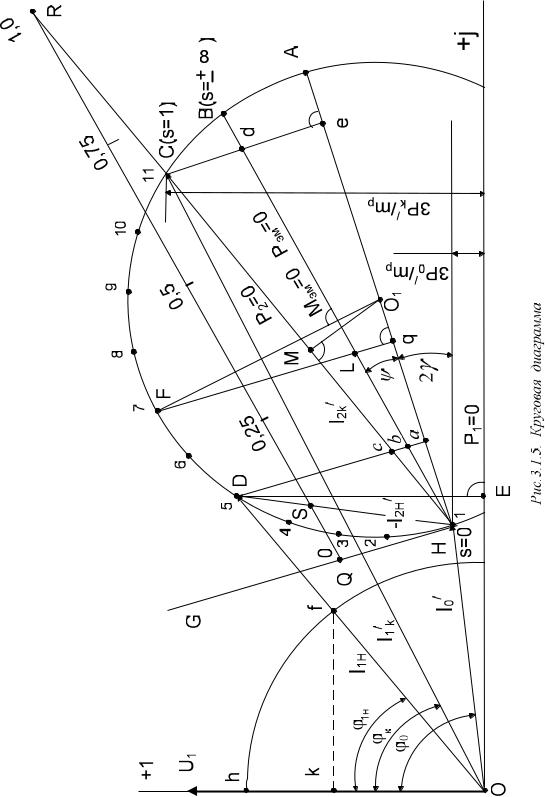
Проводят оси (+1, +j) и направляют вектор напряжения из начала координат по оси вещественных величин. Выбирают масштаб тока mi (А/мм). Для уменьшения погрешностей при определении величин из
круговой диаграммы |
рекомендуется выбирать |
масштаб |
тока |
||
mi = I1/К / 200 , А/мм. |
|
|
|
||
Определяют масштаб мощности |
|
|
|||
|
|
mp = m1U1Н mi , Вт/мм, |
|
(3.1.11) |
|
где m1 - число фаз обмотки статора. |
|
|
|||
Проводят линию параллельную оси + j на расстоянии 3P0/ |
mp и |
||||
радиусом ОН= I |
/ |
m делают засечку на ней, определив точку Н, соот- |
|||
|
0 |
i |
холостого хода (s≈0). |
|
|
ветствующую |
режиму |
На расстоянии |
|||
3PК/  mp проводят линию параллельную оси + j, на которой засекают из
mp проводят линию параллельную оси + j, на которой засекают из
точки 0 радиусом ОС= I1/К  mi точку С, соответствующую режиму ко-
mi точку С, соответствующую режиму ко-
роткого замыкания (s=1). Соединив точки Н и С прямой, восстанавливают к середине отрезка НС перпендикуляр МО1 до пересечения с линией HА, проведенной через точку Н под углом 2γ к оси + j. Угол γ определяется из выражения:
|
r |
0 |
|
I |
/ |
|
|
1 |
C |
|
0 |
) . |
(3.1.12) |
||
γ = arcsin( |
75 |
|
|
|
|||
|
|
|
|
|
|||
U1Н
51
Из точки О1, являющейся центром окружности токов, радиусом О1Н проводят окружность токов. Отрезок HА является диаметром DK окружности токов.
Для определения точки В, соответствующей скольжению s = ± ∞, из точки H проводят линию HB под углом ψ по отношению к диаметру окружности токов.
Угол ψ определяют из выражения:
|
|
|
|
|
|
|
r1 |
0 |
C |
) , |
|
|
|
|
|
|
|
|
(3.1.13) |
|
ψ = arctg( |
75 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
r21 |
|
|
|
|
xПК |
|
|
|
|
|
|
|
|
||||
где |
|
|
0 |
C |
; |
|
|
|
|
|
miDК r1 |
0 |
C |
|
. |
(3.1.14) |
|||
xПК = xК + |
75 |
|
|
|
|
xm = |
|
|
75 |
|
|
||||||||
x |
m |
|
|
|
|
U |
1Н |
− m D |
К |
x |
|
||||||||
|
|
|
|
|
|
|
|
|
|
i |
|
К |
|
||||||
Линия HB проходит через точки на окружности токов, в которых электромагнитные мощности и моменты равны нулю.
3.1.8. ОПРЕДЕЛЕНИЕ РАБОЧИХ ХАРАКТЕРИСТИК ПО КРУГОВОЙ ДИАГРАММЕ
Для определения на круговой диаграмме точки, соответствующей номинальному режиму работы двигателя из точки О в масштабе тока
откладывают отрезок ОD = I1Н  mi . ( I1Н - номинальный фазный ток
mi . ( I1Н - номинальный фазный ток
обмотки статора, его значение задает преподаватель). Соединив точку D на окружности токов с точкой Н, получают треугольник токов ОDН, в
котором ОD mi = I1Н , НD mi = I2/ Н , ОН mi = I0/ . Опустив перпендикуляр из точки D на ось + j (отрезок DЕ), получают треугольник ОDЕ, в котором DЕ mi = I1a - активная составляющая тока I1Н , а ОЕ mi = I1p - реактивная составляющая тока I1Н .
Для построения рабочих характеристик определяют данные для шести точек на окружности токов:
1 – соответствует точке холостого хода (точка Н); 2,3,4– равномерно расположенные по дуге НD;
5 – соответствует номинальному режиму (точка D);
6 – соответствует работе двигателя с небольшой перегрузкой Результаты расчетов по приведенным ниже рекомендациям запи-
сывают в табл. 3.1.4.
52
3.1.8.1.ОПРЕДЕЛЕНИЕ ПОТРЕБЛЯЕМОЙ, ЭЛЕКТРОМАГНИТНОЙ
ИПОЛЕЗНОЙ МОЩНОСТЕЙ
Потребляемая активная мощность |
|
P1 = m1U1Н I1 cosϕ1, Вт. |
(3.1.15) |
Эта мощность, определяемая из круговой диаграммы P1 = DЕ m p ,
где DEперпендикуляр на ось + j. Ось + j называют линией потребляемой мощности ( P1 = 0).
Полезную мощность P2 на круговой диаграмме отсчитывают отрезком сD на перпендикуляре Dа, проведенным к диаметру HA из точки D. Точка с лежит на прямой, соединяющей точки на окружности токов, в которых полезная мощность P2 равна нулю. Одной из них является точка холостого хода Н, так как в режиме холостого хода полезная мощность с вала не снимается, другой – точка короткого замыкания С, в которой также полезная мощность отсутствует, так как ротор заторможен. Таким образом, линия НС является линией полезной мощности P2 =0. Для точки D полезная мощность определяется выражением P2 =cD m p ,
где cD – отрезок перпендикуляра Da между точкой D на окружности токов и линией полезной мощности; точка c представляет собой точку пересечения перпендикуляра Da с линией полезной мощности НС. Линия НВ на круговой диаграмме, соединяющая точки Н (s=0) и В (s =± ∞) является линией электромагнитной мощности (РЭМ=0). Для режима работы двигателя в точке D на окружности токов электромагнитная мощность равна PЭМ =bD m p , где bD – отрезок перпендикуляра Da между
точкой D окружности токов и линией электромагнитной мощности.
3.1.8.2. ОПРЕДЕЛЕНИЕ СКОЛЬЖЕНИЯ И ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА
Скольжение s на круговой диаграмме определяют по шкале скольжений, для построения которой из точки Н проводят касательную НG к окружности токов. Из произвольной точки Q на прямой НG проводят линию параллельную линии электромагнитной мощности до пересечения с продолжением линии полезной мощности в точке R. Отрезок QR представляет шкалу скольжений в режиме двигателя (0< s<1).
Для работы двигателя в точке D скольжение определяют продолжением вектора тока (- I2/ Н ), т.е. отрезка НD, до пересечения со шкалой
скольжения в точке S.
Скольжение определяют как s=QS/QR. Этому скольжению соответствует частота вращения ротора
53
n = n1(1− s) , |
(3.1.16) |
где n = 60 f1 p .
p .
3.1.8.3. ОПРЕДЕЛЕНИЕ МОМЕНТОВ
Электромагнитный момент определяют по выражению
где |
Ω1 = ω1 p = 2πf1 |
p |
M = PЭМ |
Ω1 , Н м, |
|
(3.1.17) |
||||||
- угловая частота вращения магнитного поля, |
||||||||||||
1/с. |
Подставив |
в выражение для момента М угловую частоту Ω1, по- |
||||||||||
|
||||||||||||
лучают |
|
|
|
|
M = bD mM , |
|
|
|
(3.1.18) |
|||
|
|
|
mp p |
|
|
|
|
|
||||
где mM = |
|
- масштаб моментов, H м/мм; |
|
|
||||||||
|
ω1 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f1 - частота питающей сети, Гц; |
|
|
|
|
|
||||||
|
p - число пар полюсов двигателя. |
|
|
|
|
|||||||
|
Линия электромагнитной мощности НВ одновременно является |
|||||||||||
линией электромагнитного момента (Мэм=0) |
|
|
||||||||||
|
Величину полезного момента на валу двигателя определяют через |
|||||||||||
полезную мощность P2 = M2Ω, |
|
|
|
|
|
|||||||
где |
|
Ω = Ω |
= |
ω1 |
, |
M |
2 |
= сD m |
M |
(3.1.19) |
||
|
|
|||||||||||
|
|
|
|
1(1−s) |
|
p(1− s) |
|
|
|
|||
3.1.8.4. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ
КПД представляет собой отношение полезной мощности P2 к потребляемой мощности P1, т.е.
η = P2 / P1. |
(3.1.20) |
Определяя P2 и P1 из круговой диаграммы, получим, что |
|
η = сD/ЕD. |
(3.1.21) |
54
55
3.1.8.5. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА МОЩНОСТИ
Чтобы определить коэффициент мощности двигателя для любого тока статора I1 строят шкалу коэффициента мощности. Для этого на оси ординат выбирается отрезок 0h, который принимается за 1. Этот отрезок и представляет собой шкалу коэффициента мощности. Единичным радиусом 0h с центром в точке 0 проводят четверть окружности. Величина коэффициента мощности определяется как отношение величины проекции единичного радиуса в направлении вектора тока I1 на шкалу коэффициента мощности к единичному радиусу. Например, для режима в точке D,
cosϕ1= 0k / 0f = 0k / 0h. |
(3.1.22) |
3.1.8.6. ПОСТРОЕНИЕ РАБОЧИХ ХАРАКТЕРИСТИК
Рабочие характеристики строят по табл. 3.1.4.
Таблица 3.1.4
Рабочие характеристики
Точка на |
I1 |
P1 |
P2 |
M 2 |
η |
cosϕ1 |
s |
n |
круговой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об/ мин |
|
диа- |
А |
Вт |
Вт |
Н·м |
о.е. |
о.е. |
о.е. |
|
грамме |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
Рабочие характеристики двигателя представляют собой зависимости M 2, I1,cosϕ1,η,n = f (P2 ) при неизменных напряжении и частоте.
3.1.9.1.ОПРЕДЕЛЕНИЕ ПУСКОВЫХ ХАРАКТЕРИСТИК, ПУСКОВЫХ СВОЙСТВ
ИПЕРЕГРУЗОЧНОЙ СПОСОБНОСТИ ДВИГАТЕЛЯ
Под пусковыми характеристиками понимают зависимости фазного тока обмотки статора и электромагнитного момента от скольжения, а именно: I1 = f (s) и M = f (s). Пусковые характеристики строят, как правило, в относительных единицах. За базовую величину тока при этом принимается номинальный фазный ток I1Н обмотки статора (отрезок OD на круговой диаграмме). При номинальном
56

токе I1Н двигатель развивает номинальный электромагнитный момент М Н (отрезок bD), который в системе относительных единиц принимается за базовый. При определении пусковых характеристик используются процедуры, изложенные в 3.1.8.2 и 3.1.8.3. Для этого на дуге HC круговой диаграммы, соответствующей двигательному режиму отмечают несколько (например, 10-12) равномерно расположенных точек и для каждой из них определяют потребляемый ток и развиваемый электромагнитный момент. Результаты определения величин из диаграммы и расчеты вносят в табл. 3.1.5, на основании которой строят пусковые характеристики.
|
|
|
Пусковые характеристики |
Таблица 3.1.5 |
||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
Точка на |
|
|
|
Фазный |
Электромаг- |
Базовые |
||||
круговой |
Скольжение |
нитный |
величины |
|||||||
ток |
||||||||||
диа- |
|
|
|
момент |
|
|
||||
|
|
|
|
|
|
|
||||
грамме |
s |
|
|
I1 |
M |
Скольжение |
||||
|
|
|
|
|
|
|
|
OR= |
мм. |
|
|
мм |
о.е. |
|
мм |
о.е. |
мм |
о.е. |
|||
|
|
Номинальный |
||||||||
1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
электромагнитный |
|||
2 |
|
|
|
|
|
|
|
момент |
||
|
|
|
|
|
|
|
|
bD = |
мм. |
|
3 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Номинальный |
||
4 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
фазный ток |
|||
5 |
|
|
|
|
|
|
|
OD= |
мм. |
|
Для определения максимального момента, развиваемого двигателем, из точки 01 проводят линию, перпендикулярную линии электромагнитной мощности и продолжают ее до пересечения с окружностью токов в точке F. Из точки F опускают перпендикуляр Fq на диаметр НА окружности токов. Отрезок FL будет пропорционален максимальному моменту
M m = FL mM . |
(3.1.23) |
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя, или кратностью максимального момента
M m* = M m M Н = FL/bD |
(3.1.24) |
Отношение пускового момента к номинальному называется кратностью пускового момента
M П* = M П M Н = dC/bD |
(3.1.25) |
57

Отношение пускового тока к номинальному называется кратностью пускового тока
I |
П* |
= I |
/ |
I |
1Н |
=ОС/OD |
(3.1.26) |
|
|
1К |
|
|
|
3.1.10. КОНТРОЛЬНЫЕ ВОПРОСЫ ПРИ ДОПУСКЕ К ВЫПОЛНЕНИЮ РАБОТЫ
3.1.10.1.Конструкция, назначение и принцип действия асинхронного двигателя
3.1.10.2.Поясните, как проводится маркировка начал и концов фаз обмотки статора.
3.1.10.3.Почему вольтметр, подключенный к свободной фазе, не показывает напряжения, если две другие соединены последовательно и запитаны переменным током? Почему этот же вольтметр показывает напряжение, если в последовательно соединенных и запитанных фазах концы одной из фаз поменять местами?
3.1.10.4.Поясните, как проводится опыт холостого хода.
3.1.10.5.Поясните, как проводится опыт короткого замыкания.
3.1.10.6.Почему при пуске двигателя необходимо шунтировать измерительные приборы в цепи обмотки статора?
3.1.10.7.Поясните, какие данные необходимы для построения круговой диаграммы?
3.1.11.КОНТРОЛЬНЫЕ ВОПРОСЫ ПРИ ЗАЩИТЕ ЛАБОРАТОРНОЙ РАБОТЫ
3.1.11.1.Что понимают под режимом холостого хода двигателя?
3.1.11.2.Для чего проводят опыты холостого хода и короткого за-
мыкания?
3.1.11.3.Какие потери возникают в режиме холостого хода двига-
теля?
3.1.11.4.Что понимают под режимом короткого замыкания двига-
теля?
3.1.11.5.Какие потери возникают в двигателе при коротком замы-
кании?
3.1.11.6.С какой частотой вращается ротор относительно магнитного поля в режиме двигателя?
3.1.11.7.Поясните, почему s, I0,cosϕ0 при холостом ходе не при-
нимают нулевых значений?
3.1.11.8. Поясните, почему КПД при скольжениях s = 0 и s = 1 равен нулю?
58
3.1.11.9.При каких условиях двигатель развивает максимальный
КПД?
3.1.11.10.Как по круговой диаграмме определить перегрузочную способность двигателя?
3.1.11.11.Как меняется скольжение в процессе пуска двигателя?
3.1.11.12.Объясните работу двигателя при скольжениях близких к критическому скольжению.
3.1.11.13.При каких скольжениях двигатель работает устойчиво?
3.1.11.14.Для чего строят круговую диаграмму?
3.1.11.15.Поясните, как по круговой диаграмме определить максимальный КПД двигателя?
3.1.11.16.Определите по круговой диаграмме максимальный коэффициенте мощности двигателя.
3.1.11.17.Определите на круговой диаграмме области устойчивой и неустойчивой работы двигателя.
3.1.11.18.Определите по круговой диаграмме потребляемый ток, когда двигатель развивает максимальный момент.
3.1.11.19.Определите полезную мощность, отдаваемую двигателем, когда он работает с максимальным КПД.
3.1.11.20.Определите электрические потери в двигателе при его работе с максимальным КПД и сравните их со всей суммой потерь. Каково их соотношение?
3.1.11.21.Поясните, как определить пусковые свойства двигателя по круговой диаграмме.
3.1.11.22.Определите по круговой диаграмме перегрузочную способность двигателя.
3.1.11.23.Поясните, как построить график любой характеристики с использованием круговой диаграммы, а именно:
I1 = f (P2) ; |
η = f (P2 ) ; |
cosϕ1 = f (P2) |
n = f (P2 ); |
P1 = f (P2 ) ; |
M2 = f (P2). |
3.1.11.24. Поясните, как, пользуясь круговой диаграммой, построить пусковые характеристики двигателя.
59
3.2. ИССЛЕДОВАНИЕ ТРЕХФАЗНОГО ДВУХСКОРОСТНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
3.2.1. ЦЕЛЬ РАБОТЫ
Получить экспериментальное подтверждение теоретическим сведениям о ступенчатом регулировании частоты вращения асинхронных двигателей с короткозамкнутым ротором.
3.2.2.ПРОГРАММА РАБОТЫ
3.2.2.1.Ознакомиться с полюсопереключаемой обмоткой статора двухскоростного асинхронного двигателя.
3.2.2.2.Ознакомиться с лабораторной установкой для испытания двухскоростного асинхронного двигателя.
3.2.2.3.Провести опыты холостого хода и короткого замыкания для
двигателя с переключением обмотки из схемы треугольник (Δ) (2р=4) в схему двойная звезда (ΥΥ) (2р=2).
3.2.2.4.По результатам опытов построить круговые диаграммы для двигателей с числом полюсов 2р=4 (схема соединения – треугольник) и 2р=2 (схема соединения обмоток статора – двойная звезда).
3.2.2.5.По круговым диаграммам построить пусковые характеристики двигателя с переключением числа полюсов в отношении 2:1 при постоянной механической мощности.
3.2.2.6.Провести сравнение пусковых свойств и перегрузочной способности двигателя при переключении его обмотки статора из схемы треугольник на схему двойная звезда.
3.2.2.7.Провести сравнение энергетических показателей номинальных режимов двигателя при переключении его обмотки статора из схемы треугольник на схему двойная звезда.
3.2.3. ОБЩИЕ ЗАМЕЧАНИЯ
Способы регулирования частоты вращения роторов асинхронных двигателей подразделяют на:
•регулирование частоты вращения магнитного поля n1 = 60 f1 / p, осуществляемое регулированием первичной частоты f1 или изменением числа пар полюсов обмотки статора p;
•регулирование скольжения s двигателя, при n1 = const , поскольку частота вращения ротора асинхронного двигателя n = n1(1− s) .
60