

методичка
.pdf1.8 Определение частот вращения валов привода
Частота вращения ведущего вала редуктора определяется по формуле (об/мин):
– для схем, в которых между двигателем и редуктором расположена передача (цепная или ременная)
n |
= |
nэл |
, |
(9) |
|
||||
1 |
|
u2 |
|
|
|
|
|
||
значение nэл |
(об/мин) берется из п.1.6, а значение u2 |
из п.1.7; |
||
– для схем, в которых между двигателем и редуктором нет других передач
n1 = nэл, |
(10) |
значение nэл (об/мин) берется из п.1.6.
Частота вращения ведомого вала редуктора определяется по формуле (об/мин):
n2 |
= |
n1 |
, |
(11) |
|
u1 |
|||||
|
|
|
|
значение u1 берется из п.1.7.
Частота вращения приводного вала определяется по формуле (об/мин):
– для схем, в которых выходным служит ведомый вал редуктора
n3 = n2 ; |
|
(12) |
||
– для схем, в которых выходным является ведомый вал цепной |
||||
или ременной передачи: |
|
|||
n = |
n2 |
|
, |
(13) |
|
||||
3 |
u2 |
|
|
|
|
|
|
||
где значение u2 берется из п.1.7.
1.9 Определение крутящих моментов на валах привода |
|
||
Момент на приводном валу (Н·м): |
|
||
Твых = |
Ft Dб |
, |
(14) |
|
|||
значения Ft (Н), Dб2(м) берутся из условия задания. |
|
||
Момент на ведомом (тихоходном) валу редуктора (Н·м):
11
Т2 = |
|
|
Твых |
|
|
|
, |
(15) |
||
η η |
2 |
η |
4 |
u |
2 |
|||||
|
1 |
|
|
|
|
|
||||
где η1 – КПД соединительной муфты – учитывается в схемах, в
которых выходной вал редуктора соединяется с приводным валом при помощи муфты;
η2 – КПД подшипников;
η4 – КПД передачи (ременной или цепной), расположенной
между редуктором и приводным валом, если таковая имеется;
u2 – передаточное число передачи (ременной или цепной со-
ответственно), расположенной между редуктором и приводным валом, если таковая имеется (берется из п.1.7).
Момент на ведущем (быстроходном) валу редуктора (Н·м):
Т1 = |
|
Т2 |
|
|
, |
(16) |
|
η η |
2 |
η |
3 |
u |
|||
1 |
|
1 |
|
|
|||
где η1 – КПД соединительной муфты – учитывается в схемах, в
которых на входной вал редуктора насажена муфта; η3 – КПД цилиндрической зубчатой передачи;
η2 – КПД подшипников;
u1 – передаточное число зубчатой передачи (берется из п.1.7).
2 Расчет цилиндрической зубчатой передачи
После определения вращающих моментов на валах и частот вращения зубчатых колес выполняют основные проектные расчеты передач. Исходными данными для расчета являются: вращающий момент на колесе T2 (см. п.1.9), передаточное число u1 (см. п.1.7).
2.1 Выбор материалов и термической обработки
Материалы для изготовления зубчатых колес подбирают по таблице 4. Для повышения механических характеристик материалы колес подвергают термической обработке.
12
Таблица 4 – Механические характеристики сталей, используемых для изготовления зубчатых колес
|
Марка |
Термообработка |
Твердость |
σТ , Н / мм2 |
|
стали |
|
зубьев |
|
Шестерня |
40Х |
Улучшение |
269…302 НВ |
750 |
Колесо |
40ХН |
Улучшение |
235…262 НВ |
630 |
2.2 Определение допускаемых напряжений
Предварительно определяется среднюю твердость рабочих по-
верхностей зубьев: |
|
HBср = 0,5 (HBmin + HBmax ). |
(17) |
Допускаемые напряжения определяются по формулам: |
|
[σ]H =1,8 HBср +67, |
(18) |
[σ]F =1,03 HBср , |
(19) |
где [σ]Н – допускаемое контактное напряжение (МПа); |
|
[σ]F – допускаемое напряжение изгиба (МПа). |
|
За допускаемое напряжение изгиба в дальнейших расчётах принимается меньшее из [σ]F1 и [σ]F 2 . А за допускаемое контактное на-
пряжение – меньшее из [σ]Н1 и [σ]Н2 .
2.3 Определение межосевого расстояния
Предварительно принимают коэффициент Ka межосевого расстояния: для передач с прямыми зубьями Ka = 49,5; для передач с косыми и шевронными зубьямиKa = 43,0.
Коэффициент ширины ψba принимают в зависимости от поло-
жения колес относительно опор. При проектировании одноступенчатого цилиндрического редуктора рекомендуется принять из ряда
стандартных ψba =0,4. |
|
||
Коэффициент ширины |
|
||
ψbd =0,5ψba (u1 +1). |
(20) |
||
Коэффициент неравномерности распределения нагрузки по дли- |
|||
не контактных линий |
|
||
KHβ =1+ |
2 ψbd |
≤ 2,0, |
(21) |
|
|||
|
S |
|
|
13
где S – индекс схемы при симметричном расположении шестерни относительно опор, принимается равным 8.
Межосевое расстояние (мм)
aw ≥ Ka (u1 |
+1) 3 |
KHβ |
T2 |
, |
(22) |
|
ψba u12 |
[σ]2H |
|||||
|
|
|
|
где T2 – крутящий момент на тихоходном валу (Н·мм); [σ]Н – допускаемое контактное напряжение (МПа).
Вычисленное межосевое расстояние округляют в большую сторону до числа из приложения В.
2.4 Расчет предварительных основных размеров колеса
Делительный диаметр (мм), точность вычисления до третьего знака после запятой
d2 = |
2 aw u1 |
, |
(23) |
|
u1 +1 |
||||
|
|
|
||
где аw – межосевое расстояние (мм), берется из п.2.3; |
|
|||
u1 – передаточное число зубчатой передачи (см. п.1.7). |
|
|||
Ширина (мм) |
|
|
||
b2 =ψba aw . |
|
(24) |
||
Значение b2 округляют в ближайшую сторону до целого числа.
2.5 Расчет и выбор по стандарту модуля передачи
Сначала принимают коэффициент модуля Km для передач: пря-
мозубых – 6,8; косозубых – 5,8; шевронных – 5,2. Предварительно модуль передачи (мм)
m ≥ |
2 Km T2 |
|
, |
(25) |
||
d |
2 |
b [σ] |
||||
|
|
2 |
F |
|
|
|
где T2 – крутящий момент на тихоходном валу (Н·мм);
[σ]F – допускаемое напряжение изгиба (МПа);
d2 – делительный диаметр колеса (мм), берется из п.2.4; b2 – ширина колеса (мм), берется из п.2.4.
Расчетное значение модуля передачи округляется в большую сторону до стандартного из ряда чисел: 1,0; 1,25; 1,5; 2,0; 2,5; 3,0; 4,0; 5,0; 6,0; 8,0; 10,0.
14

2.6 Определение суммарного числа зубьев и угла наклона
|
Угол наклона прямозубых колес равен 0˚. |
|
||||
|
Минимальный угол наклона зубьев колес: |
|
||||
– |
косозубых |
βmin =arcsin |
4m |
(но не менее 8˚); |
(26) |
|
|
||||||
|
|
|
|
b2 |
|
|
– |
шевронных |
βmin = 25°. |
|
|||
|
Для косозубых колес β =8...20°, для шевронных β = 25...40°. |
|||||
|
Суммарное число зубьев |
|
||||
|
z∑ = |
2 aw cos βmin |
. |
(27) |
||
|
|
|||||
|
|
m |
|
|||
Полученное значение z∑ округляют в меньшую сторону до це-
лого и определяют действительное значение угла наклона (точность вычисления до 4-го знака после запятой)
β = arccos |
zΣm |
. |
|
(28) |
||||
|
|
|
||||||
|
|
2aw |
|
|
||||
2.7 Определение числа зубьев шестерни и колеса |
||||||||
Число зубьев шестерни |
|
|||||||
z = |
z∑ |
|
≥ z |
, |
(29) |
|||
(u +1) |
||||||||
1 |
1min |
|
|
|||||
где z1min |
1 |
|
|
|
|
|
|
|
– минимальное число зубьев шестерни: для прямозу- |
||||||||
|
бых колес |
z1min =17 ; |
для косозубых и шевронных |
|||||
|
z |
=17 cos3 β . |
|
|||||
|
1min |
|
|
|
|
|||
Значение z1 округляют в ближайшую сторону до целого. |
||||||||
Число зубьев колеса |
|
|
||||||
z2 = z∑ − z1 . |
|
(30) |
||||||
2.8 Определение фактического передаточного числа
Фактическое передаточное число:
uф = z2 . (31) z1
Отклонение от заданного передаточного числа
15

∆u = |
|
uф −u1 |
100 ≤ 4% . |
(32) |
|
|
|||
|
u |
|||
|
|
|
|
|
|
1 |
|
|
|
При невыполнении условия (32) необходимо выполнить перерасчет, увеличивая значение аw, полученное из формулы (22), согласно приложению В.
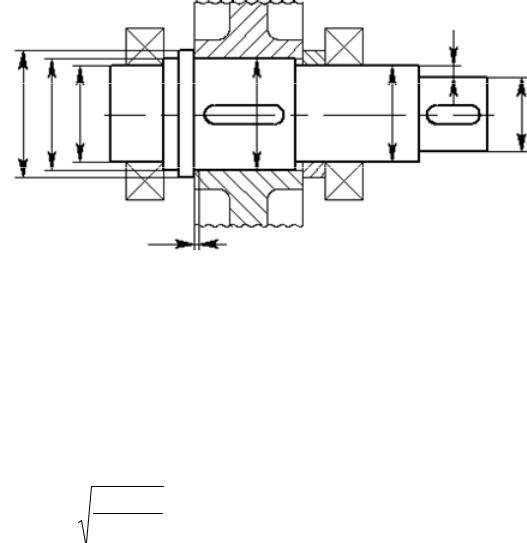
2.9 Определение геометрических размеров колес
|
Размеры колес показаны на рисунке 2. |
|
|||||||
|
Делительные диаметры (мм) |
|
|
||||||
– |
шестерни |
d1 |
= |
z1 m |
, |
|
(33) |
||
|
|
||||||||
|
|
|
|
|
|
cos β |
|
|
|
– |
колеса |
|
d2 |
= 2 aw − d1 . |
|
(34) |
|||
|
Точность вычисления до третьего знака после запятой. |
||||||||
|
Диаметры окружностей вершин зубьев (мм) |
|
|||||||
– |
шестерни |
da1 = d1 + 2 m , |
|
(35) |
|||||
– |
колеса |
|
da2 = d2 +2 m. |
|
(36) |
||||
|
Диаметры окружностей впадин зубьев (мм) |
|
|||||||
– |
шестерни |
d f 1 = d1 −2,5 m, |
|
(37) |
|||||
– |
колеса |
|
d f 2 = d2 −2,5 m . |
|
(38) |
||||
|
Ширину шестерни b1 (мм) принимают по соотношению b1/b2, |
||||||||
где b2 – ширина колеса (таблица 5). |
|
|
|||||||
Таблица 5 – Вычисление ширины шестерни |
|
||||||||
|
При b2 |
до 30 |
|
|
св. 30 до 50 |
св. 50 до 80 |
св. 80 до 100 |
||
|
b1/b2 |
1,1 |
|
|
1,08 |
1,06 |
1,05 |
||
b
da
d
df
Рисунок 2 – Размеры колес
16
3 Проектный расчет валов цилиндрической зубчатой передачи
3.1 Выбор материалов
Для большинства редукторов общего назначения рекомендуется принимать для вала-шестерни цилиндрической зубчатой передачи термически обработанную сталь 40Х, вала колеса – сталь 45. Механические характеристики представлены в таблице 6.
Таблица 6 – Допускаемые напряжения для валов и вращающихся осей
Марка |
Твёрдость |
Механические характеристики, |
H |
|
||||
мм2 |
|
|||||||
НВ, не |
|
|
|
|
|
|
||
стали |
ниже |
σВ |
σТ |
τТ |
σ−1 |
τ−1 |
|
|
|
|
|||||||
40Х |
270 |
900 |
750 |
450 |
410 |
240 |
|
|
45 |
240 |
800 |
550 |
300 |
350 |
210 |
|
|
При определении диаметров выступающих концов ведущего и ведомого валов допускаемое напряжение при кручении можно принимать в пределах [τ]k = 20...25МПа. Рекомендуется принимать сред-
нее значение [τ]k =22,5МПа.
3.2 Определение диаметров ведущего вала и подбор подшипников
d1
t |
п1 |
|
d |
dп1
r
d б 1п
d1 – диаметр выступающего конца вала; dn1 – диаметр вала под подшипник; dбn1 – диаметр буртика для упора подшипника; t – высота буртика; r – радиус галтели фаски
Рисунок 3 – Эскиз ведущего вала
17

Диаметр выступающего конца вала рассчитывается на чистое кручение по пониженному допускаемому напряжению без учета влияния изгиба
d1 |
≥ 3 |
T1 |
, |
(39) |
||
0,2 |
[τ]k |
|||||
|
|
|
|
|||
где Т1 – крутящий момент на ведущем валу (Н·мм) (см. п.1.9). Полученный диаметр округляется до ближайшего большего зна-
чения по приложению В. |
|
Диаметр вала под подшипник принимают |
|
dп1 = d1 + 2 t , |
(40) |
где t – высота буртика определяется в зависимости от диаметра d1 по приложению Г.
Полученный результат округляется до ближайшего большего стандартного значения из ряда чисел для внутренних диаметров под-
шипников качения: 17; 20; 25; 30; 35; 40; 45; 50; 55; 60; 65; 70; 80; 90.
При проектировочном расчете диаметр буртиков для упора
подшипников определяют по соотношению |
|
dбп1 = dп1 +3,2 r , |
(41) |
где r – радиус галтели вала (приложение Г).
Полученный диаметр округляется по приложению В до ближайшего значения.
Для опор выбирают тип подшипников. При выборе подшипников для редукторов с прямоили косозубыми колесами целесообразно рассматривать возможность применения радиальных однорядных шарикоподшипников средней серии (тип 300). В редукторах с шевронными колесами целесообразно применять роликоподшипники средней серии без буртиков на наружном кольце (тип 2000).
Предварительный подбор подшипника осуществляется по диаметру dп1 согласно приложениям Д и Е. После подбора подшипника
заполняется таблица 7.
Таблица 7 – Техническая характеристика подшипников
Обозначение |
Внутренний |
Наружный |
Ширина |
Динамическая |
Статическая |
подшипника |
диаметр |
диаметр |
подшипника |
грузо- |
грузо- |
|
dn, мм |
D, мм |
В, мм |
подъемность |
подъемность |
|
|
|
|
С, кН |
С0, кН |
|
|
|
|
|
|
18
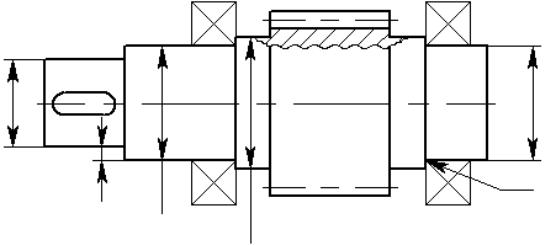
3.3 Определение диаметров ведомого вала и подбор подшипников
|
|
|
|
t |
|
|
k |
п2 |
|
|
бп2 |
d |
|
|
бк |
п2 |
d |
2 |
|
d d d |
|
d |
||
f
d2 – диаметр выступающего конца вала; dn2 – диаметр вала под подшипник; dбn2 – диаметр буртика для упора подшипника; t – высота буртика; dk – диаметр вала посадочного места колеса; dбk – диаметр буртика для упора колеса; f – размер фаски колеса
Рисунок 4 – Эскиз ведомого вала
Диаметр выступающего конца вала рассчитывается на чистое кручение по пониженному допускаемому напряжению без учета влияния изгиба
d2 |
≥3 |
T2 |
, |
(42) |
||
0,2 |
[τ]k |
|||||
|
|
|
|
|||
где Т2 – крутящий момент на ведомом валу (Н·мм) (см. п.1.9). Полученный диаметр округляется до ближайшего большего зна-
чения по приложению В. |
|
Диаметр вала под подшипник принимают |
|
dп2 = d2 + 2 t , |
(43) |
где t – высота буртика определяется в зависимости от диаметра d2 по приложению Г.
Полученный результат округляется до ближайшего большего стандартного значения из ряда чисел для внутренних диаметров под-
шипников качения: 17; 20; 25; 30; 35; 40; 45; 50; 55; 60; 65; 70; 80; 90.
При проектировочном расчете диаметр буртиков для упора
подшипников определяется по соотношению |
|
dбп2 = dп2 +3,2 r |
(44) |
19
где r – радиус галтели вала (приложение Г).
Полученный диаметр округляется по приложению В до ближайшего значения.
Диаметр вала посадочного места колеса определяется по форму-
ле |
|
dk 2 = dп2 +(5...7) |
(45) |
и округляется по приложению В до ближайшего значения.
Диаметр буртика для упора колеса определяется по соотноше-
нию
dбк2 ≥ dk 2 +3 f , |
(46) |
где f – размер фаски колеса (приложение Г).
Полученный диаметр округляется по приложению В до ближайшего значения.
Выбор типа подшипников для ведомого вала производится по рекомендациям, приведенным в п.3.2. Установив тип подшипника, результаты следует занести в таблицу 5.
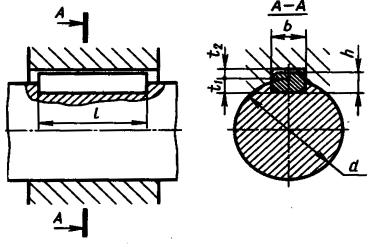
4 Выбор шпонок
Для передачи вращающего момента чаще всего применяют призматические шпонки (ГОСТ 23360-78), которые имеют прямоугольное сечение (рисунок 5).
d – диаметр вала; b – ширина шпонки; h – высота шпонки; l – рабочая длина шпонки; t1 – глубина врезания шпонки в паз вала; t2 – глубина врезания шпонки в ступицу
Рисунок 5 – Шпоночное соединение
20