

2 Настройка следящей системы
Задачами настоящего раздела являются:
- получение умений по настройке в эксплуатационных судовых условиях контроллера следящей системы на получение требуемого качества работы следящей системы рассматриваемого типа.
Задание:
-изучить САР со следящей системой
-изобразить схемы САР
-составить таблицу 3
-изучить методику настройки САР со следящей системой
Схема следящей системы:
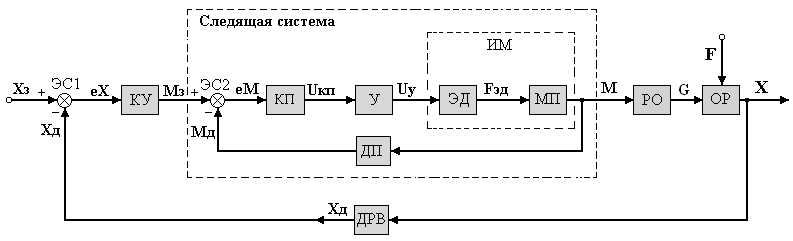
Рисунок 2,1. Функциональная схема системы автоматического регулирования со следящей системой, содержащей асинхронный электродвигатель.
К качеству работы следящих систем регуляторов предъявляются следующие требования: - отсутствие автоколебаний в контуре следящей системы,
- статическая ошибка не должна превышать зону нечувствительности, - максимальное быстродействие системы,
- максимально допустимое динамическое отклонение (перерегулирование) не более 3%, - отсутствие колебательности переходных процессов.
Настройка следящей системы:
Таблица 2,1
|
Номер шага настройки |
1 |
2 |
3 |
4 |
|
kpp |
1 |
2 |
4 |
2,7 |
|
| ΔМз| |
0,25 |
0,25 |
0,25 |
0,25 |
|
dМm |
0 |
0 |
0,2 |
0,005 |
|
dМmo =dМm / | ΔМз| 100% |
0 |
0 |
0 |
0 |
|
Оценка dМmo |
< 10%±2% |
>10%±2% |
>10%±2% |
< 10%±2% |
Получаем графики при kpp = 2,7
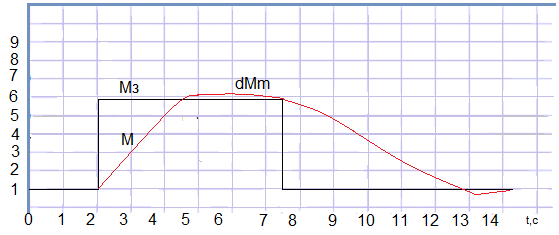
Рисунок 2,2 Переходные процессы в следящей системе при настройке контроллера позиционирования.
Таблица 2,2 Результаты настройки следящей системы с асинхронным электродвигателем
|
№№ пп |
Наименование величины, размерность |
Обозна- чение |
Расчётн. форм. или источник |
Тип контроллера |
|
П | ||||
|
|
Настройка |
|
|
|
|
1 |
Передаточная функция контроллера |
Wкп(s) |
|
Kpp |
|
2 |
Коэфф. пропорциональности |
kpp |
|
2,7 |
|
3 |
Время дифференцирования, с |
Tpp |
|
- |
|
4 |
Постоянная времени фильтра, с: ПД1 |
Tfp |
Tfp= 0.1Tdp |
- |
|
|
ПД2 |
Tfp |
Tfp=0.1Tdp/kpp |
- |
|
5 |
Измен. положения ИМ, отн. ед. |
ΔМз |
Рис. 9,11 |
0,25 |
|
6 |
Перерегулирование, отн. ед. |
dМm |
Рис. 9,11 |
0,005 |
|
7 |
Относит. перерегулирование, % |
dМmo |
dМmo=dМm / |ΔМз| 100% |
0 |
|
8 |
Время переходн. процесса, с |
Тп |
Рис. 9,11 |
40 |
|
9 |
Отметка о выполнение условия: |
|
dМmo=1%±0.2% |
выполняется
|
|
10 |
Отметка о качестве настройки |
|
|
удовлетворяет |
Вывод:
С помощью коэффициента пропорциональности и времени деференцирования можно добиться наилучшего качества работы САР со следящей системой, а именно уменьшения перерегулирования САР.