

И. Мисюченко |
Последняя тайна Бога |
П3. Красное смещение при ускорении. Эксперимент
В настоящей работе описан эксперимент по проверке теоретически предсказанного эффекта инерционного «красного» смещения в акустике. Показано, что зависимость изменения частоты от ускорения, расстояния и скорости распространения возмущений абсолютно такая же, как выведенная в ОТО для красного смещения фотонов в поле ускорения. Разработан практически полезный прибор, позволяющий измерять ускорения относительно воздуха (жидкости).
Относительное изменение частоты от ускорения
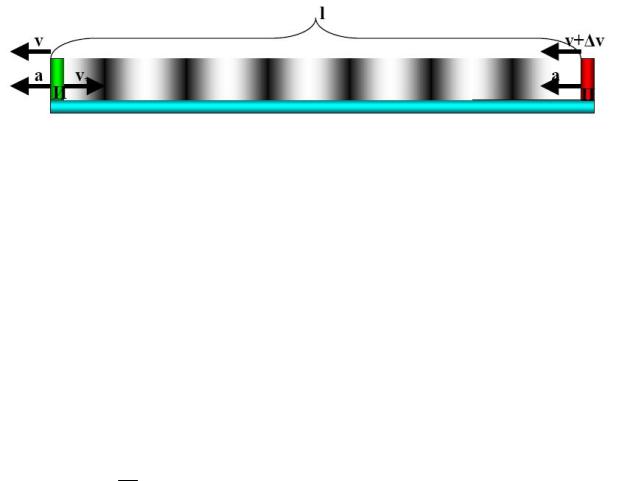
Рассмотрим ситуацию, изображённую на рис. П3.1
Рис. П3.1. Жёстко связанные приёмник и излучатель звука, движущиеся ускоренно относительно среды
Источник звука И излучает звуковые колебания с частотой f . При этом источник
жёстко механически связан с приёмником П (они закреплены на одном основании) и расстояние между ними l . Вся система движется со скоростью v и ускорением a . Скорость распространения звуковых колебаний в среде vзв . В некий момент времени t0
излучатель начал работать. Для того, чтобы звук от источника И достиг приёмника П , потребуется время τ , равное:
(П3.1) τ = |
l |
[с]. |
|
vзв |
|
Поскольку излучённый звук более не связан с источником и приёмником, а связан лишь со средой, предполагающейся неподвижной, то за время τ пока звук «летит» от источника И к приёмнику П , скорость приёмника возрастёт на величину v , равную:
(П3.2) v = aτ = al [м/с].
vзв
Длина волны звука постоянна и никак не зависит от движения приёмника. Следовательно, увеличение взаимной скорости звуковой волны и приёмника эквивалентно изменению частоты принятого звукового сигнала:
(П3.3) f |
= |
v |
= |
al |
. |
f |
|
vзв |
vзв2 |
||
235
И. Мисюченко Последняя тайна Бога
Эта формула в точности соответствует формуле для инерционного красного смещения, полученного в ОТО, с той разницей, что вместо скорости света стоит скорость звука в
среде. Оценим величину изменения частоты |
f при ускорении 10 м/с2, длине базы l = 0.1 |
||||||||
м, скорости |
звука в воздухе vзв =330 м/с и |
частоте ультразвука f =40 кГц (типовая |
|||||||
частота для распространённых парковочных ультразвуковых датчиков): |
|||||||||
(П3.4) f = |
|
fal |
= |
40000 10 0.1 |
= |
|
40000 |
= 0.367 [Гц]. |
|
|
vзв2 |
|
|
||||||
|
|
3302 |
|
108900 |
|
|
|||
Видим, что изменение частоты хотя и малое, но вполне измеримое.
Техническая реализация измерителя ускорения
Техническая сложность в том, что для измерения столь малого изменения частоты надо наблюдать за сигналом несколько секунд, а за это время уже закончится ускорение (в реальных условиях). Чтобы избежать этого противоречия, следует воспользоваться не частотными, а фазовыми методами. Например, определять сдвиг фазы принятого сигнала относительно излучённого. Понятно, что при изменении частоты принимаемого сигнала на f мы будем иметь непрерывно набегающий со временем сдвиг фазы принятого
сигнала относительно излученного:
(П3.5) ϕ(t) = 2π ft = 2πfalt [рад],
vзв2
где расстояние l =0.1 м между приёмником и излучателем, f - несущая частота 40 кГц, a - измеряемое ускорение, t - время.
Поскольку работать с постоянно изменяющимся во времени значением не очень удобно, продифференцируем по времени обе части выражения (3.5) и получим:
(П3.6) |
dϕ(t) |
= |
d 2πfalt |
= |
2πfal |
[рад/сек]. |
|||
|
|
|
|
|
|||||
dt |
dt vзв2 |
vзв2 |
|||||||
|
|
|
|
||||||
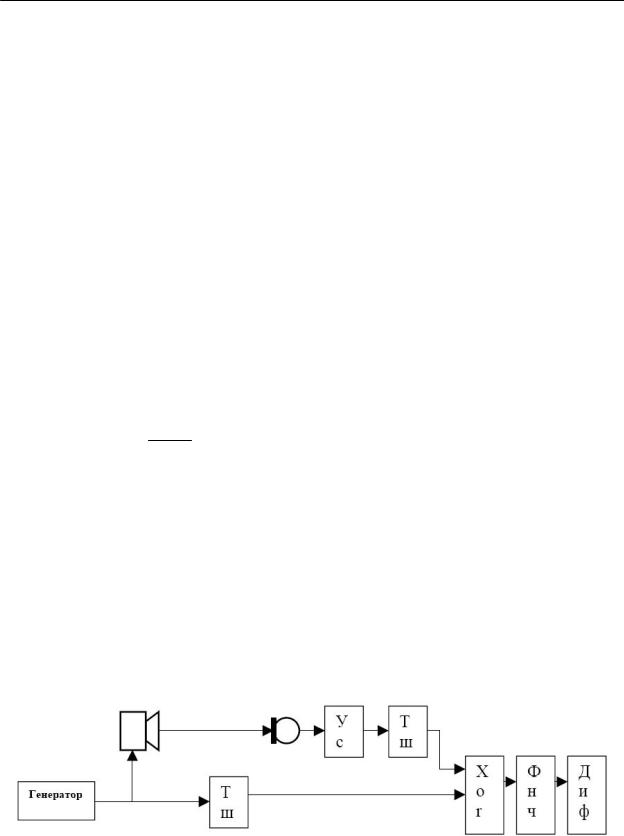
Из формулы (П3.6) непосредственно следует уже блок-схема измерительной установки:
Рис. П3.2. Блок-схема измерительной части прибора
Здесь - Ус узкополосный усилитель, Тш - триггеры Шмитта, Xor - элемент "исключающее ИЛИ", Фнч - фильтр нижних частот с частотой среза около 100 Гц (с учётом характерных времён механических перемещений), и Диф - дифференциатор.
Прибор работает следующим образом: генератор непрерывно излучает сигнал частоты f (40 кГц), который преобразуется излучателем в ультразвуковые колебания
236
И. Мисюченко |
Последняя тайна Бога |
среды. Сигнал с приёмника усиливается и подаётся на формирователь (схема перехода через ноль, триггер Шмита). После триггера сигнал поступает на элемент «исключающее ИЛИ» где сравнивается с аналогичным сигналом, полученным из сигнала задающего генератора. На выходе схемы Xor формируются импульсы, длительность которых пропорциональна сдвигу фазы между принятым и излучённым сигналом. Эти импульсы поступают на ФНЧ, который полностью подавляет несущую частоту и выделяет только постоянную составляющую, пропорциональную разности фаз. Затем, в полном соответствии с формулой (П3.6), сигнал с выхода ФНЧ поступает на дифференциатор Диф, на выходе которого формируется сигнал, пропорциональный изменению разности фаз. Когда ускорения нет (система покоится относительно среды), то сигнал на выходе дифференциатора равен нулю, так как сдвиг фаз есть, но он постоянен. Как только система приходит в движение с ускорением a , изменяется разность фаз излучённого и принятого сигнала и начинает «дрейфовать» во времени. Именно этот дрейф и выделяется дифференциатором и поступает на выход схемы как сигнал, пропорциональный ускорению. Далее сигнал ускорения может быть оцифрован или визуализирован и использован для анализа и измерений.
Строго говоря, выходной сигнал лишь приближённо линейно зависит от ускорения, поскольку зависимость набега разности фаз от времени на самом деле синусоидальна. Поэтому хорошая линейность возможна лишь на малых временах действия и величинах ускорения. Так, например, при ускорениях около 1 м/с2 полный период сигнала разности фаз составит около 30 секунд, то есть такие ускорения, длящиеся доли секунды и даже единицы секунд, можно считать всё ещё достаточно малыми и короткими, чтобы выходной сигнал отражал их величину адекватно. Улучшить линейность устройства можно, использовав однокристальную микроЭВМ для анализа выходного сигнала и формирования зондирующих импульсов. В этом случае появляется возможность независимо определять ещё и скорость звука в среде, от точности определения которой зависит точность определения ускорения согласно (П3.6).
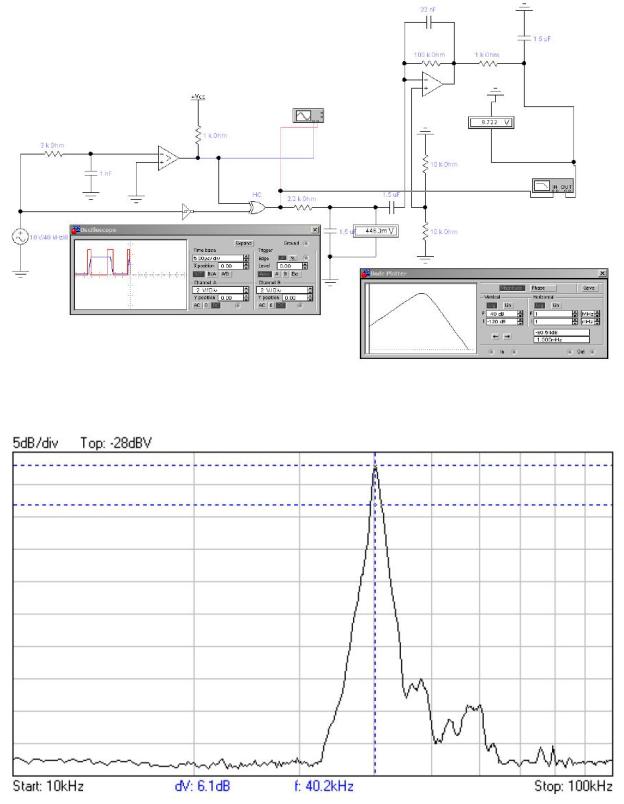
Принципиальная схема
Принципиальная схема модели узла измерителя относительного сдвига фаз устройства, выполненная в WorkBench, приведена на рис. П3.3. Усилитель и триггер Шмита на входе тракта приёмника заменены на компаратор мгновенных значений. ФНЧ выполнен в виде простейшей RC-цепочки, дифференциатор выполнен на ОУ и RС- цепочке с одновременным сдвигом уровня выходного сигнала на середину питания, с целью согласования с микроЭВМ.
237
И. Мисюченко |
Последняя тайна Бога |
Рис. П3.3. Модель измерителя относительного сдвига фаз с дифференцирующей цепочкой на выходе и постоянным уровнем, для считывания АЦП микроЭВМ.
Рис. П3.4. АЧХ сквозного тракта прибора по несущей частоте ультразвука
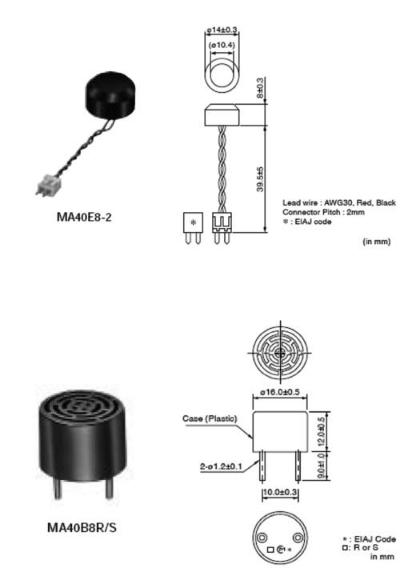
Для излучения ультразвука использовались излучатель типа MA40E8-2 (рис. П3.5) и приёмник типа MA40B8RS (рис. П3.6) фирмы muRata с центральной паспортной частотой 40 кГц. Измеренная АЧХ сквозного тракта приведена на рис. П3.4. Ширина полосы по уровню -6 дБ составляет около 2 кГц.
238
И. Мисюченко |
Последняя тайна Бога |
Рис. П3.5. Излучатель ультразвука.
Рис. П3.6. Приемник ультразвука
При реализации экспериментальной установки для задания стабильной частоты была использована тактируемая кварцевым резонатором 20 МГц ОЭВМ PIC16F876.
Экспериментальная установка и результаты экспериментов
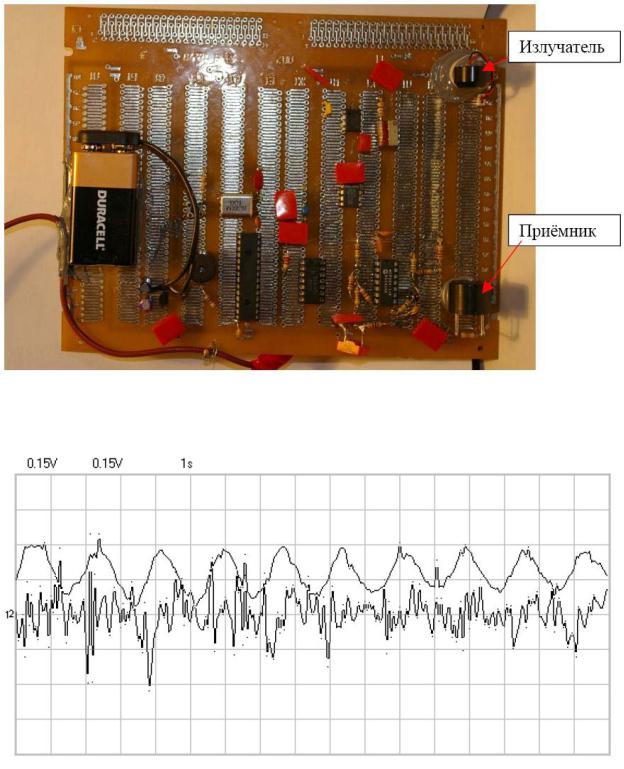
Экспериментальная установка, изображенная на рис. П3.7, состояла из описанной выше схемы измерительного узла, ультразвукового датчика из жёстко закреплённых компаундом излучателя и приёмника ультразвука, однокристальной ЭВМ и автономного источника питания. Все компоненты смонтированы на макетной плате, которая подвешивается в качестве маятника либо устанавливается на лабораторном столе. Сигналы, пропорциональные скорости и ускорению установки относительно воздуха выводятся гибкими витыми парами и подключаются к лабораторному комплексу PC SCOPE для записи и анализа результатов. В ходе эксперимента маятник-датчик свободно раскачивался после начального отклонения от вертикали, и осуществлялась одновременная запись сигналов скорости и ускорения в файл. Затем производилась фильтрация и визуализация сигналов в системе Matlab v6.5. Схема подвеса маятникадатчика приведена на рис. П3.10.
239
И. Мисюченко |
Последняя тайна Бога |
Рис. П3.7. Внешний вид платы маятника-датчика. При экспериментах вся плата целиком, вместе с батарейным источником питания подвешивалась на проводе и служила маятником
Рис. П3.8. Исходные сигналы скорости (верхний) и ускорения (нижний), полученные в ходе эксперимента с маятником
Сигналы записывались в режиме «Transient recorder» синхронно по каналам скорости и ускорения, затем производилась их математическая обработка.
Исходные сигналы приведены на рис. П3.8, а обработанные - на рис. П3.9.
240
И. Мисюченко |
Последняя тайна Бога |
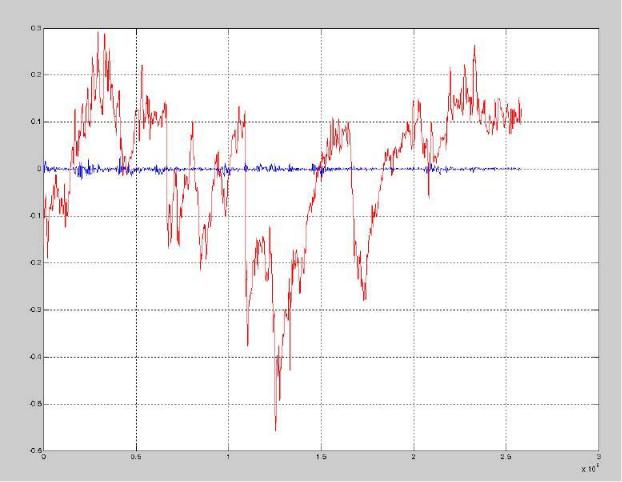
Рис. П3.9. Отфильтрованные сигналы скорости (синий) и ускорения (красный), полученные в ходе эксперимента с маятником.
Видно, что сигналы скорости и ускорения, приведенные на рис. П3.8, сдвинуты на 90 градусов один относительно другого, что и следовало ожидать. Фильтрация ещё более наглядно демонстрирует этот факт на рис. П3.9. Установлено, что при вполне «гладком» механическом движении датчика в воздухе возникают многочисленные мелкомасштабные и кратковременные ускорения, сопоставимые по амплитуде с ускорениями маятника. Они легко отфильтровываются фильтром нижних частот. Кроме того, наблюдается температурный дрейф сигнала (рис. П3.11), связанный с флуктуациями температуры воздуха в лаборатории и вызванными ими изменениями скорости звука.
241
И. Мисюченко |
Последняя тайна Бога |
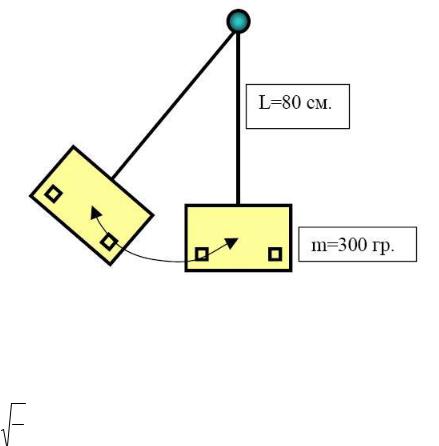
Рис. П3.10. Схема подвеса устройства (маятника-датчика) в эксперименте.
Эти флуктуации носят низкочастотный характер и легко отфильтровываются фильтром верхних частот.
Итак, датчик-мятник подобен математическому маятнику. Период его колебаний:
(П3.7)T = 2π |
l . |
|
g |
При длине подвеса 0.8 м период оказывается равным 1.8 секунды. На рис. П3.8 видно, что в экране умещаются 9 периодов, соответствующих 17 секундам полного времени. Соответственно измеренный в эксперименте период колебаний маятника получается 17/9=1.89 секунды, что является неплохим соответствием, учитывая довольно большие габариты и малый вес платы маятника-датчика. В середине процесса затухающих колебаний маятника скорость его движения составляла около 10 см/сек, ускорение около 10 см/с2. Это соответствовало амплитудным значениям сигналов скорости и ускорения около 100 мВ. В состоянии полного покоя маятника сигнал помехи в обоих каналах имел амплитуду около 10 мВ. Следовательно, разрешающая способность прибора по скорости не хуже 1 см/сек, а по ускорению около 1 см/с2.
Таким образом, мы не только продемонстрировали возможность обнаружения в акустике эффектов, считавшихся релятивистскими, но и разработали прибор, способный измерять скорости и ускорения движения газообразных (жидких) сред относительно датчика.
242
И. Мисюченко |
Последняя тайна Бога |
Рис. П3.11. Температурный дрейф скорости и ускорения за всё время эксперимента (около 45 минут). Температура изменялась скачком каждый раз, когда пускали маятник, поскольку при этом двигались люди, открывалась дверь и перемещались значительные массы воздуха
Что касается второй части эксперимента - проверки отсутствия непосредственного влияния тяготения на звук в воздушной среде, то его постановка и результаты выглядят гораздо проще. Датчик устанавливался на открытом лабораторном столе, приподнятом на держателе в первом случае так, чтобы звук шёл сверху вниз, во втором - снизу вверх. До поверхности стола и до потолка было практически одинаковое расстояние с тем, чтобы влияние отражённых от них звуковых волн было бы не только малым, но и по возможности одинаковым. В непосредственной близости от установки были удалены все предметы, могущие вызвать отражение звуковых волн и искажение картины звукового поля. Приведём результаты эксперимента. В первом случае амплитуда на выходе канала скорости была 164 мВ при среднеквадратичном отклонении от этого значения 16.8 мВ. Во втором случае соответственно 155 мВ и 15.1 мВ. Совершенно очевидно, что оба результата статистически одинаковы. С выхода же канала ускорения были получены средние значения 0 мВ в обоих случаях при среднеквадратичных отклонениях 1.4 мВ. То есть статистически достоверный ноль. На наш взгляд, это - ожидаемый результат. Более того, он фактически показывает, каким образом в реальности происходит гравитационное красное смещение фотонов. В самом деле, если в ходе только что описанного эксперимента, вдруг допустить воздуху свободно падать сквозь пол, то он, как и всякое иное тело, будет падать с ускорением свободного падения. Наша установка немедленно зафиксирует наличие ускорения датчика относительно воздуха. Следовательно, вполне закономерно предположить, что эфир (вакуум) свободно падает на гравитирующие тела, и именно это ускоренное движение его относительно испускаемых с поверхности таких тел
243
И. Мисюченко |
Последняя тайна Бога |
фотонов и приводит к «покраснению» последних. Следует отметить для тех, кто пожелает повторить и проверить наши результаты, что температура воздуха влияет на показания приборов существенно и что во всяком помещении существует вертикальный градиент температуры, который при небрежном экспериментировании легко ошибочно принять за «гравитационный» эффект.
Литература
1.Piezoelectric ceramic sensors. Murata Manufacturing Co. Ltd. Cat. No. P19E-8
2.Красное гравитационное смещение. Википедия. http://ru.wikipedia.org/wiki/%D0%93%D1%80%D0%B0%D0%B2%D0%B8%D1%82 %D0%B0%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D0%BE%D0%B5_%D0 %BA%D1%80%D0%B0%D1%81%D0%BD%D0%BE%D0%B5_%D1%81%D0%BC %D0%B5%D1%89%D0%B5%D0%BD%D0%B8%D0%B5
3.В. В. Майер. Простые опыты с ультразвуком. М.: Наука, 1978.
4.Э. Ангерер. Техника физического эксперимента. М.: Государственное издательство физико-математической литературы. 1962.
5.Г.С. Горелик. Колебания и волны. М.: Государственное издательство физикоматематической литературы. 1959.
244