

-
Абстрактные конечные автоматы 1-го и 2-го рода. Матрицы переходов и выходов. Представление графом.
Абстрактный автомат задается как совокупность шести объектов:
-
множества входных сигналов Х (входной алфавит автомата);
-
множества выходных сигналов Y (выходной алфавит автомата);
-
множества состояний автомата А;
-
элемента а0А, называемого начальным состоянием автомата;
-
функций переходов (а,x) и выходов (а,x), задающих однозначные отображения множества (а,x), где аА и xX, в множества А и Y.
Абстрактный автомат функционирует в дискретном времени, в каждый момент этого времени имеет определенное состояние а(t) из множества А состояний автомата. В каждый момент времени, отличный от начального, автомат способен воспринимать входной сигнал x(t) – произвольную букву входного алфавита X и выдавать соответствующий выходной сигнал y(t) – определенную букву выходного алфавита.
Закон функционирования автомата первого рода задается уравнениями вида:
|
а(t)= [а(t-1), x(t)]; y(t)=[а(t-1), x(t)]; t=1,2,...; |
(7) |
Закон функционирования автомата второго рода:
|
а(t)= [а(t-1), x(t)]; y(t)=[а(t), x(t)]; t=1,2,... |
(8) |
В практике используют:
-
автомат Мили: произвольный конечный автомат первого рода;
-
автомат Мура: частный случай конечных автоматов второго рода, у которого функция выходов (а,x) не зависит от переменной х.
Автомат называется конечным если конечно число его состояний. Автоматы задают табличным способом или направленным графом. В первом случае строят матрицы переходов и выходов. Строки обеих этих таблиц обозначаются входными сигналами автомата, а столбцы – его состояниями. На пересечении строки и столбца таблицы переходов ставится соответствующее значение функции переходов (а,x), а в таблице выходов – значение (а,x).Для автомата Мура сдвинутая таблица выходов сводится к одной строке, поэтому часто в таблице переходов над каждым состоянием аi автомата, обозначающим тот или иной столбец таблицы, ставят соответствующий этому состоянию выходной сигнал (аi,x)= (аi).
При задании автомата с использованием направленного графа вершины графа отождествляются с состояниями автомата, а стрелки – с выходными сигналами. Если входной сигнал xi вызывает переход автомата из состояния аj в состояние аk, то на графе автомата этому сигналу соответствует помеченная буквой xi стрелка, соединяющая вершину, соответствующую состоянию аj, с вершиной, соответствующей состоянию аk. Для задания функции выхода ребра графа также помечаются соответствующими выходными сигналами. Если обозначенная входным сигналом xi стрелка соединяет вершину аj с аk, то в случае автоматов первого рода ей предписывается выходной сигнал (аj,xi), а в случае автоматов второго рода – выходной сигнал (аk,xi) (см. рис. 12).

Пример графа АКА первого рода представлен на рис. 13, а соответствующие ему матрицы переходов и выходов – в таблицах 5 и 6.
|
Таблица 5 |
|
Таблица 6 |
||||||||||||
|
Матрица переходов |
|
Матрица выходов |
||||||||||||
|
|
А |
B |
C |
D |
E |
|
|
А |
B |
C |
D |
E |
||
|
x1 |
B |
C |
D |
E |
A |
|
x1 |
y1 |
y2 |
y3 |
y4 |
y5 |
||
|
x2 |
E |
C |
D |
D |
E |
|
x2 |
y2 |
y3 |
y2 |
y4 |
y5 |
||
|
x3 |
A |
B |
D |
B |
A |
|
x3 |
y5 |
y1 |
y2 |
y5 |
y1 |
||
Пример графа АКА второго рода представлен на рис. 14, а соответствующие ему матрицы переходов и выходов – в таблицах 7 и 8.
|
Таблица 7 |
|
Таблица 8 |
||||||||||||
|
Матрица переходов |
|
Матрица выходов |
||||||||||||
|
|
a |
b |
c |
d |
e |
|
|
a |
b |
c |
d |
e |
||
|
х1 |
b |
c |
e |
a |
d |
|
х1 |
y5 |
y1 |
y2 |
y3 |
y3 |
||
|
х2 |
c |
d |
b |
e |
a |
|
х2 |
y5 |
y4 |
y1 |
y2 |
y4 |
||


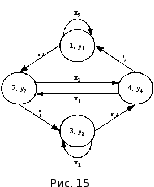
В случае автомата Мура все стрелки, входящие в одну и туже вершину аk, должны быть обозначены одним и тем же выходным сигналом. Поэтому принято обозначать выходными сигналами не стрелки, а вершины, в которые эти ребра входят, т. е. на графе автомата Мура каждая вершина имеет два обозначения – одно, определяющее состояние автомата, и другое, обозначающее выходной сигнал.
Пример графа АКА Мура представлен на рис. 15, а соответствующая ему совмещенная матрица переходов и выходов – в таблице 9.
|
Таблица 9 |
||||
|
Совмещенная матрица переходов и выходов |
||||
|
y |
y1 |
y2 |
y3 |
y4 |
|
а |
1 |
2 |
3 |
4 |
|
x1 |
2 |
3 |
3 |
2 |
|
x2 |
1 |
4 |
4 |
1 |
|
ПРИМЕРЫ автоматных моделей дискретных устройств. |
|
Для моделирования элементов вычислительных систем и сетей, проявляющих статистически закономерное случайное поведение, можно использовать вероятностные автоматы. Вероятностный автомат определяется, в дополнение с семейству множеств X, Y, А конечного автомата, семейством матриц {M(y/x)}. Если Х(x1...xl) – входной алфавит, Y(y1...ym) – выходной алфавит, A(a1...an) – множество состояний, то M(y/x) – семейство lm матриц размерностью nn. Элемент ij(yp/xr) матрицы М(yp/xr) есть вероятность ij(yp/xr)=Р(yp, aj/ai, xr), i, j=1...n, того, что, находясь в состоянии ai и получив входной сигнал xi, автомат перейдет в состояние aj, а выходной сигнал будет yp. Если ij(yp/xr) принимает только значения единицы или нуля, имеем частный случай вероятностного автомата – обычный детерминистический конечный автомат [3, 6, 20].