

§ 3.2. Постоянные ошибки. Астатические системы
Среди типовых режимов работы системы автоматического управления, определяющих точность этой системы, простейшими являются режимы работы при постоянной величине внешнего воздействия и при изменении внешнего воздействия с постоянной скоростью.
Найдем значение установившейся ошибки в замкнутой системе автоматического управления при постоянной величине внешнего задающего воздействия
![]()
Пусть задана передаточная функция разомкнутой цепи
![]()
где N(s) и L(s) не содержит множителя s (свободные члены их равны единице).
Тогда передаточная функция замкнутой системы для ошибки будет равна
Согласно теореме о конечном значении, выражение установившейся ошибки принимает вид
По этой формуле с учетом (3.11) получаем
![]()
так как свободные члены многочленов N(s) и L(s) равны единице.
Это значение ошибки называется статической ошибкой:
![]()
Ее
можно столь же просто получить из
дифференциального уравнения (3.12) как
частное решение при
![]() .
.
Если же подавать на вход системы задающее воздействие, изменяющееся с постоянной скоростью,
![]()
то и установившаяся ошибка ε как частное решение уравнения (3.12) тоже будет изменяться с постоянной скоростью. При достаточно длительном воздействии такое нарастание ошибки недопустимо.
Для ликвидации этого явления нужно изменить структуру системы так, чтобы многочлен L(s) не имел свободного члена, т. е. чтобы
![]()
другими словами, передаточная функция разомкнутой цепи этой системы W(s) должна иметь нулевой полюс. В самом деле, при воздействии g(t)=g0 + g1t изображение которого
![]()
по формуле (3.13) с учетом (3.11) и (3.16) получим
![]()
Следовательно, в такой системе при задающем воздействии с постоянной скоростью не будет нарастающей ошибки. Это постоянное значение ошибки называется скоростной ошибкой
![]()
То же самое легко можно получить из дифференциального уравнения системы (3.12) при условии L(p)=pL1(p), как частное решение, учитывая, что при воздействии (3.15) имеем
![]()
При постоянном же задающем воздействии g(t) = const = g0 в такой системе установившаяся ошибка будет равна нулю (εст=0).
Итак, система, обладающая свойством (3.16), т. е. нулевым полюсом в передаточной функции разомкнутой цепи W(s), не будет иметь статической ошибки и даст постоянное значение скоростной ошибки.
Такая система, отличающаяся отсутствием статической ошибки, называется астатической системой в отличие от системы, не имеющей нулевого полюса в разомкнутом состоянии и обладающей вследствие этого статической ошибкой.
Относительно технических средств, с помощью которых достигается астатизм системы, речь будет ниже в главе 6. Здесь можно только, вспоминая передаточные функции типовых звеньев (глава 1), сказать, что для этого необходимо присутствие интегрирующего звена.
Очевидно, что все следящие системы и системы программного управления, имеющие дело с переменным задающим воздействием, долиты проектироваться как астатические. В системах же автоматического регулирования, настраиваемых на поддержание постоянного значения регулируемой величины, допустимо иметь и статические ошибки (астатизма не требуется).
В следящей системе (рис. 3.2) интегрирующим звеном, создающим астатизм, является сам исполнительный
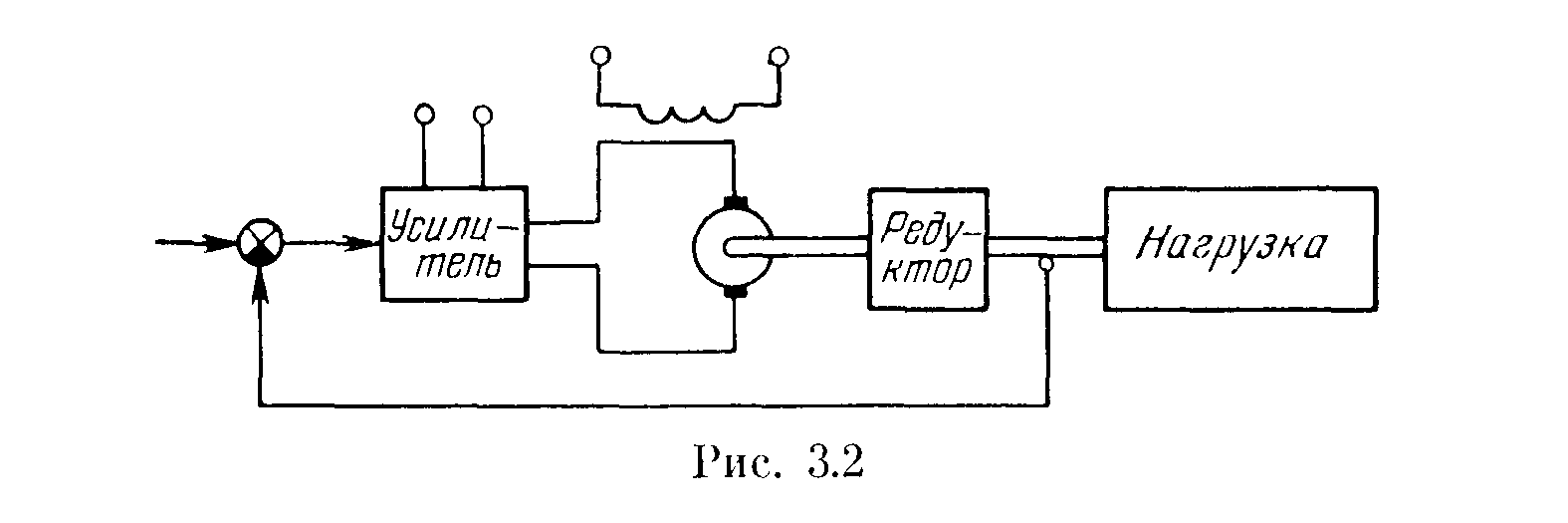
электродвигатель. В самом деле, угловая скорость вала двигателя в установившемся режиме пропорциональна величине управляющего напряжения на входе. Поэтому угол поворота вала (выходная величина системы) будет пропорционален интегралу от входного управляющего напряжения.
Как видно из формул ошибок (3.14) и (3.17), для уменьшения величины ошибки нужно добиваться достаточно большого значения общего коэффициента усиления К разомкнутой цепи проектируемой системы. Поэтому величина К именуется добротностью системы.
Можно строить системы автоматического управления также с астатизмом второго и более высокого v-го порядка, когда многочлен L(s) имеет вид соответственно
![]()
т. е. с двойным пулевым полюсом или пулевым полюсом ν-го порядка в передаточной функции W(s) разомкнутой цепи.
Тогда, если мы возьмем задающее воздействие в виде
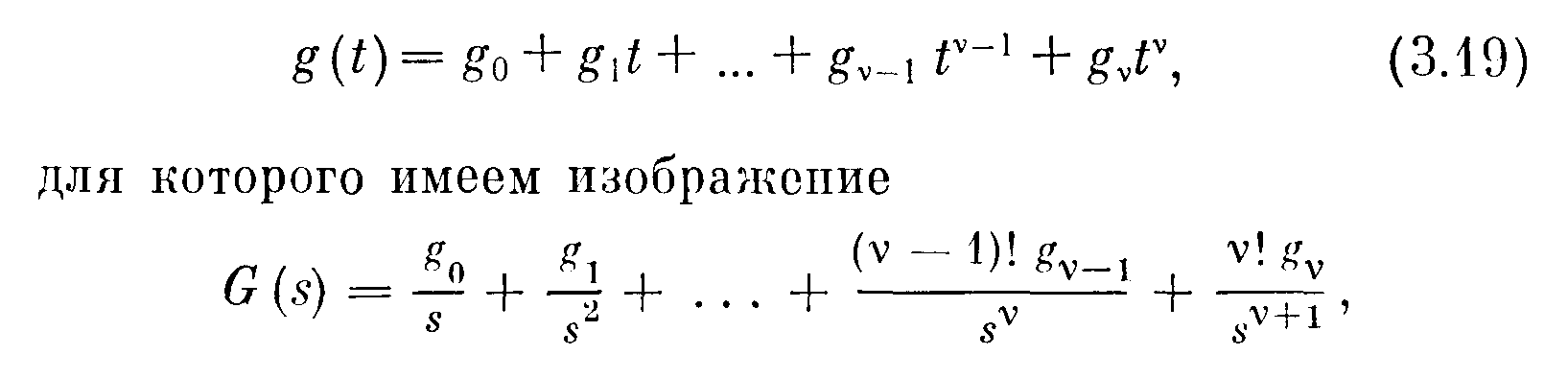
то по формуле (3.13) с учетом (3.11) и (3.18) в системе с астатизмом ν-го порядка получим постоянную ошибку
![]()
а все первые ν членов задающего воздействия (3.19) будут иметь нулевую установившуюся ошибку.
Здесь рассматривалось свойство астатизма системы автоматического управления но отношению к задающему воздействию. Может идти речь и об астатизме системы но отношению к возмущающему воздействию. Если возмущающее воздействие f(t) приложено в отличном от задающего g(t) месте, то условие астатизма при этом будет другим.
Поскольку в этом случае отклонение регулируемой величины х обусловлено возмущающим воздействием, то надо будет пользоваться передаточной функцией замкнутой системы но возмущению
![]()
причем согласно (2.20) при g(t)=0 получаем
![]()
или же дифференциальным уравнением
![]()
Как видно, для астатизма системы по отношению к возмущающему воздействию потребуется наличие нулевых корней в многочлене R(s).