

Методичка_АСУТП_РГР[1]
.pdf2. Заздалегідь вибрати тип регулятора за величиною відношення часу запізнювання об'єкту до його постійної часу τ Tε :
Позиційний регулятор |
τ T |
< 0,2 |
||
|
ε |
|||
Регулятор безперервної дії |
|
τ |
T |
<1,0 |
|
0,2< |
ε |
||
Багатоконтурна система регулювання |
τ T |
>1,0 |
|
|
|
ε |
|
||
3.Уточнити тип регулятора, для чого перевіряють, чи зможе простий регулятор (для нейтральних об'єктів починають з П-регулятор), забезпечити задану якість регулювання. Перевірка виконується таким чином:
a.Визначають значння динамічного коефіцієнта регулювання, який визначають із співвідношення: yД = RД xB , де RД - динамічний коефіцієнт регулювання, що характеризує міру дії регулятора на об'єкт. Для стійких об'єктів його визначають за графіком залежності RД від τ Tε з урахуванням заданого типового перехідного процесу.
51

b. Перевіряють виконання умови yД < yД доп |
(Д3.2). |
Якщо умова виконується, переходять до п. 5.
4.Якщо умова (Д3.2) не виконується для простого регулятора, то послідовно розглядають регулятори, що мають складніші закони (ПІ-, ПІД-регулятори).
5.У разі вибору П-регулятора додатково перевіряють величину статичної помилки на дотримання нерівності: yст < ycт доп . Значення
yст визначають із співвідношення: yст = yст* xB , де yст* - статична помилка при k0 = 1 і xB = 1. Значення yст* визначається по графіках
залежності від τ Tε з урахуванням заданого типового перехідного процесу. Якщо отримані значення більші за допустимі, то переходять до регуляторів з І- складовою (ПІ, ПИД-регулятори).
6.При виконанні умові (Д3.2) перевіряють: чи задовільняє час регулювання умові: t p < t p доп . Значення t p знаходять із
співвідношення t p τ , визначеного по графіках.
Динамічний |
|
коефіцієнт |
регулювання |
R |
д , |
статична |
помилка |
|||||
регулювання |
yст |
і |
час регулювання |
tp |
τ |
для |
стійких |
об'єктів (з |
||||
|
||||||||||||
самовирівнюванням) наведені на рис. В1. |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
д , |
|
|
|||||
Динамічний |
|
коефіцієнт |
регулювання |
R |
статична |
помилка |
||||||
|
yст |
|
|
tp |
τ |
|
|
|
|
|
|
|
регулювання |
і час регулювання |
для нейтральних об'єктів наведені |
||||||||||
на рис. В2.
52

Перехідний процес: а- аперіодичний; б- з 20% перерегулюванням; в- з мінімальною квадратичною площею відхилення.
Рис. В1
53

Перехідний процес: а- аперіодичний; б- з 20% перерегулюванням; в- з мінімальною квадратичною площею відхилення.
Рис. В2
54
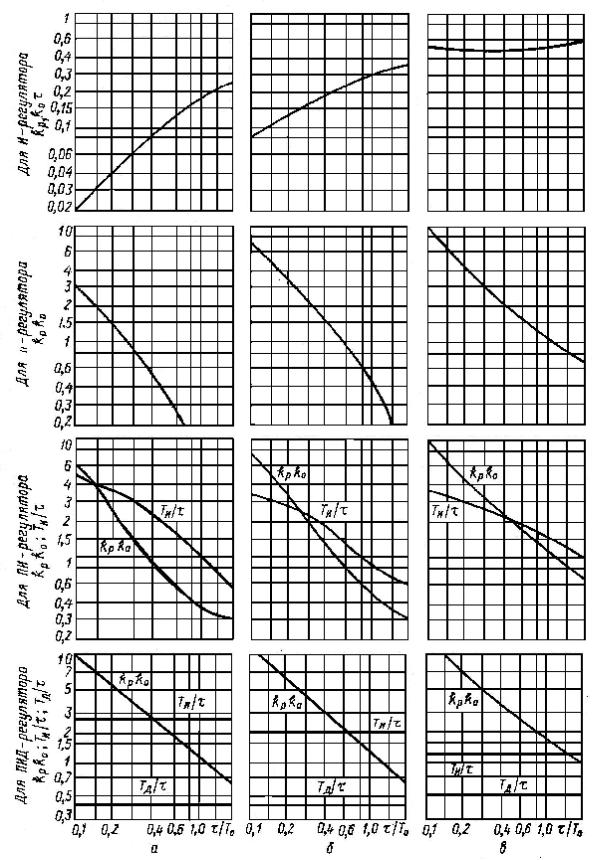
Криві налаштувань І-, П-, ПІ-, ПІДрегуляторов стійкого об’єкту [3].
Перехідний процес: а- аперіодичний; б- з 20% перерегулюванням; в- з мінімальною квадратичною площею відхилення.
55

Криві налаштувань П-, ПІ-, ПІДрегуляторів нейтрального об’єкту [3].
Перехідний процес: а- аперіодичний; б- з 20% перерегулюванням; в- з мінімальною квадратичною площею відхилення.
56

Додаток Д. Визначення оптимальних параметрів регуляторів з використанням середовища MathCad 14
Завдання
Для заданої системи регулювання визначити настройки П- і ПІрегуляторів, які забезпечують показник коливальності М=1,4.
Wоб = |
k |
|
e− pτ |
|
|
|
|
|
(T1 p +1)(T2 p + |
1) |
|
|
|
|
|
||
|
|
|
|
yТ |
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Yз |
||
|
|
|
|
|
|
|||
|
Регулятор |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При знайдених параметрах налаштувань кожного з регуляторів побудувати графіки перехідних процесів в замкнених системах із заданими регуляторами.
∙Визначення налаштувань П – регулятора
∙Підготовка середовища
∙Вводимо уявну одиницю j як
j º  -1
-1
Знак глобального присвоєння ≡ вставляємо натисненням на відповідної кнопки панелі Evaluation або введенням ~ з клавіатури.
Символ квадратного кореню вставляється аналогічно з панелі
Calculator
∙Задаємо масив індексів
i := 0.. 1000
(вводиться так: i : 0 ; 1000)
∙Задаємо масиви значень ω і р:
wi := 0.01×i pi := wi×j
Нижній індекс вставляється за допомогою панелі Matrix або клавішею [.
∙Передавальна функція об’єкта
∙Введемо відомі параметри передавальної функції об’єкта
k := 12 |
t := 1 |
T1 := 0.5 |
T2 := 0.3 |
∙Введемо власне функцію об’єкта у вигляді масиву, тобто вона повинна бути проіндексована
57

Wobi := (T1×pi + 1)k×(T2×pi + 1)×e- pi×t
Символ експоненти вставляється з панелі Calculator, а літера τ із панелі Greek.
∙Передавальна функція П регулятора
∙Задаємо попереднє значення коефіцієнта пропорційності
Kp := 1
∙Вводимо передавальну функцію П регулятор
Wregi := Kp
∙Побудова загальної АФХ об’єкта і регулятора
∙Знайдемо загальну передавальну функцію об’єкта і регулятора при розімкненій системі
Wi := Wobi×Wregi
∙Побудуємо АФХ отриманої функції.
Для цього потрібно поставити курсор у точці де має бути верхній лівий кут майбутнього графіка і натиснути на кнопку X-Y Plot на панелі Graph. Відразу ввести Re(W) [Tab] [Tab] [Tab] Im(W). Тут Re(W) і Im(W) функції, що виділяють дійсну і уявну відповідно частини комплексного числа W.
∙Настроїмо вигляд створеного графіка, для цього потрібно:
1.двічі клацнути по графіку
У вікні, що відкрилось переставити перемикач Axis Style у положення Crossed і
встановити мітки Grid lines у фреймах X-Axis Primary Y Axis.
58

Перейти на вкладку Traces і збільшити товщину лінії до 2.
∙Побудова променя і М-кола
∙ Задаємо значення М |
M := 1.4 |
∙Знаходимо кутовий коефіцієнт променя
kl := tan |
æ |
asin |
æ 1 |
öö |
||
|
|
|
|
|||
è |
è M øø |
|||||
|
|
|||||
∙ Запишемо масив індексів для частини променя il := 0.. 20
∙Знаходимо масиви координат точок для побудови променя
xlil := -il |
ylil := kl×xlil |
∙Задаємо масив індексів М-кола
ic := 0.. 2×3.14 0.01
∙Задаємо приблизне значення L := 27.3
∙Вводимо функцію М-кола
a := 0.01×ic |
Mcir |
:= (cos (a ) + j×sin(a ))× |
L |
- L |
||
M |
||||||
ic |
ic |
ic |
ic |
|
||
Будуємо описаним вище способом графік, по осі Х якого вводимо Re(W),xl,Re(Mcir), а по осі
Y – Im(W),yl,Im(Mcir)
59

∙Визначення оптимального значення коефіцієнта пропорційності
∙Змінюючи значення введеного вище L потрібно домогтися дотику М кола до АФХ
∙Обчислюємо Kp
Kp := |
M |
|
× M float, 4 ® 0.07479 |
|
M2 - 1 |
||||
|
L |
|||
тут float,4 – параметр системи символьної обробки MathCAD, для зменшення точності обробки до 4 значущих знаків. Вставляється за допомогою панелі Symbolic
∙Визначення налаштувань ПІ – регулятора
∙Підготовка середовища
∙Вводимо уявну одиницю j як
j º  -1
-1
Знак глобального присвоєння ≡ вставляємо натисненням на відповідної кнопки панелі Evaluation або введенням ~ з клавіатури.
Символ квадратного кореню вставляється аналогічно з панелі Calculator
∙Задаємо масив індексів
i:= 0.. 1000
(вводиться так: i : 0 ; 1000)
∙Задаємо масиви значень ω і р:
wi := 0.01×i + 10- 19
додавання дуже малого числа необхідно для усунення помилки ділення на нуль pi := wi×j
Нижній індекс вставляється за допомогою панелі Matrix або клавішею [.
∙Передавальна функція об’єкта
∙Введемо відомі параметри передавальної функції об’єкта
k := 12 |
t := 1 |
T1 := 0.5 |
T2 := 0.3 |
∙Введемо власне функцію об’єкта у вигляді масиву, тобто вона повинна бути проіндексована
Wobi := (T1×pi + 1)k×(T2×pi + 1)×e- pi×t
Символ експоненти вставляється з панелі Calculator, а літера τ із панелі Greek.
∙Знаходження параметрів ПІ регулятора
∙Задаємо попереднє значення коефіцієнта пропорційності і часу ізодрому
Kp0 := 1 |
Ti0 := 0.5 |
параметри задані у вигляді масивів для формування таблиці результатів
60