

тема 7 / Тема 7 З-2 Л(2) МПЛА
.doc
Занятие №2. Способы определения местоположения ЛА.
-
Способы определения местоположения ЛА
Для определения местоположения ЛА в навигации применяются следующие способы:
способ линий (поверхностей) положения (ЛП) с использованием радиотехнических, астрономических и др. систем;
способ счисления пути (доплеровское, инерциальное, воздушное счисление пути и их комбинации);
обзорно-сравнительный способ (визуальная ориентировка, сравнение телевизионных, радиолокационных и других изображений местности с соответствующими картами; корреляционно-экстремальная навигация по физическим полям Земли).
Способ линий (поверхностей) положения
Способ линий (поверхностей) положения основан на определении МП ЛА, как точки перечисления 2-х и более линий (3-х и более поверхностей) положения, соответствующих определенным постоянным параметрам. Если наклонная дальность до ЛА в 10 и более раз превышает его высоту, то задачу определения МП ЛА (точки М на рис.1) решают на плоскости. В зависимости от используемых ЛП и соответствующих им радионавигационных систем, способ линий положения подразделяется на 4 основных вида, которые поясняются с помощью рис.1-4.

Рис.1. Дальномерный способ определения координаты ЛА

Рис.2. Угломерный способ определения координаты ЛА
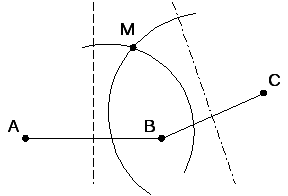
Рис.3. Разностно-дальномерный способ определения координаты ЛА

Рис.4. Угломерно-дальномерный способ определения координаты ЛА
Достоинством способа линий положения является определение МП ЛА без учета и знания пройденного пути. Недостаток – дискретная фиксация МП ЛА. Если засечка происходит с большим интервалом времени, то этот способ комбинируют со способом счисления пути или обзорно-сравнительным методом.
Способ счисления пути
Счислением пути называется способ определения координат МП ЛА, основанный на вычислении пройденного пути относительно известного начального положения (х0, z0) ЛА. Для счисления пути необходимо располагать данными о направлении (курсе) движения ЛА и его ускорении a(t) или скорости V(t) движения относительно Земли.
Текущие координаты МП ЛА определяются следующим образом:
 ;
; 
где:


Достоинства способа: непрерывное определение места ЛА; автономность системы; автоматическое счисление пути. Недостаток - накопление погрешностей определения МП ЛА во времени.
Обзорно-сравнительный способ
Обзорно-сравнительный способ (метод) основан на определении структуры какого-либо физического поля, характерного для данной местности, и сравнении параметров этого поля с параметрами, введенными в запоминающее устройство навигационных систем или навигационными картами. В простейшем случае обзорно-сравнительный метод определения МП ЛА реализуется путем сравнения изображения местности на карте или навигационном экране с фактическим видом земной поверхности, наблюдаемым экипажем визуально или с помощью технических средств.
2. Авиационные радионавигационные устройства и системы
Практическая реализация РТСН осуществляется в виде различных радионавигационных устройств (РНУ), радионавигационных систем (РНС) и комплексных систем навигации. РНУ - радиотехническое средство, основанное на определенном принципе действия и предназначенное для самостоятельного измерения НЭ (НП).
Из данного определения РНУ следует, что они в своем действии автономны. Примерами автономных РНУ являются радиовысотомеры, доплеровские измерители путевой скорости и угла сноса (ДИСС).
Однако иногда вводят понятие и неавтономных РНУ, которые входят в РНС. Например, бортовой автоматический радиокомпас (АРК), измеряющий КУР по сигналам, излучаемым наземными радиостанциями и радиомаяками, является неавтономным РНУ, входящим в состав амплитудных РНС.
Под РНС подразумевают совокупность взаимосвязанных между собой радиотехнических средств (РНУ), расположенных в различных точках пространства, основанных, как правило, на определенном принципе действия, и предназначенную для решения частной навигационной задачи (определение МП ЛА, посадка, система предупреждения столкновений ЛА и т.п.). Примерами РНС являются дальномерные, разностно-дальномерные системы, АРК (с радиостанциями), угломерно-дальномерные и доплеровские.
РНС не являются автономными в своем действии, так как они состоят из наземных и бортовых РНУ или бортовых РНУ, расположенных на различных ЛА (например, системы предупреждения столкновений).
Обобщенная структурная схема РНС
Как информационные системы, радионавигационные средства (так же как и радиолокационные) относятся к классу систем извлечения информации, так как основной их функцией является получение (извлечение) количественных данных о координатах подвижных объектов, параметрах их движения и пространственно-временной ориентации, относительно заданных траекторий.
Под передающим устройством (ПРД) на рис.5 подразумевается вся аппаратура формирования структуры радиосигнала (включая модуляцию и кодирование с целью повышения помехозащищенности (РНС), а под приемным устройством (ПРМ) - аппаратура, обеспечивающая выделение информационных сигналов и преобразование (демодуляцию и декодирование) их к виду, пригодному для подачи в измерительное устройство. Под измерительным устройством РНС понимают аппаратуру, которая на основе сопоставления параметров сигналов, поступающих с приемника, с заданным (опорным) параметром колебаний опорного генератора формирует навигационную информацию, удобную для использования потребителем. Опорный генератор задает начало отсчета измеряемых данных.
На рис. 5, а изображена беззапросная РНС, передающая сигналы только в одном направлении («ЛА - земля» или «земля - ЛА»). При этом опорный сигнал может быть сформирован как на приемной, так и на передающей стороне.
Структурная схема РНС, показанная на рис. 5, б, содержит ретрансляционное устройство (ответчик) (ПРМ2, ПРД2, W2 и W3) и позволяет передавать сигналы в двух направлениях («ЛА - земля - ЛА» или «земля - ЛА - земля»). Для РНС, использующих свойство отражения радиосигналов, в этой схеме вместо приемопередатчика ответчика следует рассматривать отражающий объект. При этом схема РНС может содержать несколько передаваемых, приемных и антенных устройств, т.е. являться многоканальной.

Рис. 5. Структурная схема радионавигационных систем
Авиационные РНУ и РНС как составные части комплексных
систем навигации
Ни одно отдельно взятое техническое средство навигации, в том числе и РТСН, не является универсальным ни по объему решаемых задач, ни по применению в различных условиях навигационной обстановки. Кроме того, в связи со значительным ростом скоростей, высот и дальностей полета современных ЛА, а также с увеличением интенсивности воздушного движения и повышением требований по обеспечению безопасности полетов, непрерывно возрастают требования к точности и надежности навигационных измерений.
Удовлетворение этих требований в настоящее время достигается как за счет совершенствования отдельных навигационных измерителей (РНУ и РНС), так и за счет их объединения (комплексирования) в единую комплексную систему навигации (КСН). Таким образом, РНУ и РНС являются составными частями КСН, причем они играют ведущую роль при решении навигационных задач.
Основная цель создания КСН состоит в достижении наивысшей точности и надежности выполнения навигационных измерений.
Под КСН понимают совокупность взаимосвязанных между собой бортовых и наземных (либо только бортовых или наземных) технических средств навигации, основанных на различных принципах действия и предназначенных для совместного измерения навигационных параметров (элементов) при решении определенных навигационных задач. Взаимосвязь между навигационными измерителями осуществляется с помощью бортовой вычислительной системы (БВС), основу которой составляют бортовые цифровая и аналоговая вычислительные машины (БЦВМ и АВМ).
Авиационные РНУ и РНС как составные части пилотажно
и прицельно навигационных комплексов
Пилотажно-навигационным комплексом называют совокупность взаимосвязанных измерителей навигационной и пилотажной информации (ИНПИ), системы обработки и отображения информации и системы управления, предназначенную для навигации и пилотирования летательного аппарата на всех этапах полета. Данное определение ПНК не указывает на уровень интеграции оборудования в комплексе и охватывает как автоматизированные и автоматические комплексы, так и обычное пилотажное и навигационное оборудование, функционирующее во взаимодействии с экипажем.
На рис.6 приведена обобщенная структурная схема ПНК, где аббревиатура САУ означает систему автоматического управления полетом ЛА. БВС, основой, которой, как правило, является одна или несколько БЦВМ, обрабатывает информацию от всех измерителей в соответствии с определенными алгоритмами, вырабатывает сигналы управления полетом ЛА и выдает их в САУ, а также подает соответствующую информацию в устройство отображения. В устройство отображения информация может поступать непосредственно от ИНПИ и из САУ. Объектом управления является сам ЛА.

Рис. 6. ПНК в составе замкнутой системы управления ЛА