

Методичка - ЭЛЕКТРОТЕХНИКА И ЭЛЕКТРОНИКА
.pdf40
ние U1н = 220 В на первичной обмотке трансформатора.
3.3.Сделать первое измерение при полностью введенном сопротивлении реостатов, данные занести в табл. 5.3.
3.4.Уменьшая сопротивления реостатов, установить значе-
ния тока I2 равные 0,75, 3 и 3,75 А. Данные занести в
табл. 5.3.
3.5. Выключить питание и вместо реостата R2 подсоеди-
нить конденсаторы C (рис. 5.6 в). Установить максимальную емкость, сделать один замер. Результаты измерений записать в табл. 5.3. Напряжение на первичной обмотке поддерживать неизменным, равным 220 В.
Таблица 5.3
Нагрузка |
|
|
|
|
Измерено |
|
|
|
|
Вычислено |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
1 |
|
U |
2 |
P |
|
I |
|
I |
2 |
cosϕ |
2 |
P |
β |
|
|
|
|
|
1 |
|
1 |
|
|
|
2 |
|
||||
|
|
В |
|
|
Вт |
|
|
А |
|
|
|
Вт |
|
||
Активная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Емкостная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Индуктивная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.6. Выключить питание. Полностью отсоединить нагрузку. Подключить к зажимам вторичной обмотки (a и x) катушку индуктивности Zk (рис. 5.6 б). Установить максимальное значение
тока I2 и сделать одно измерение. Результаты измерений запи-
сать в табл. 5.3. Напряжение на первичной обмотке поддерживать неизменным равным 220 В.
3.7. По результатам измерений испытания трансформатора при нагрузке вычислить значения cosϕ2 для различной нагрузки
во вторичной обмотке трансформатора. 4. Обработка результатов
4.1. По данным опытов холостого хода и рабочего режима построить внешние характеристики трансформатора U2 = f (I2 )
при активной нагрузке (cosϕ2 = 1), активно-емкостной (cosϕ2 < 1), и активно-индуктивной (cosϕ2 < 1) нагрузках.
4.2. Найти величину падения напряжения U2 % для токов

41
I2 = (0 ÷1,25)I2н при cosϕ2 = 1, cosϕ2 (индуктивный по данным опыта), cosϕ2 (емкостный также по данным опыта), построить зависимость U2% = f (I2 ) при cosϕ2 = const.
4.3. Задаваясь различными знaчениями I2 = (0 ÷1,25)I2н (с
интервалами 0,05, 0,1, 0,2, 0,5, 0,7, 1,0, 1,25) при cosϕ2 для ак-
тивной, индуктивной и емкостной нагрузкам (вычисленных в п. 4.2) найти коэффициент полезного действия трансформатора ηт и построить зависимость ηт = f (I2 ) при cosϕ2 = const. Опре-
делить коэффициент нагрузки трансформатора, при котором значение коэффициента полезного действия максимально.
4.4. Вычертить электрическую схему замещения трансформатора и указать ее параметры.
5. Методические указания 5.1. Напряжение короткого замыкания трансформатора и
его составляющие определяются по формулам:
Uk =U1k 100% ;
U1н
активная составляющая напряжения короткого замыкания
Uak = I1н rk 100%;
U1н
реактивная составляющая напряжения короткого замыкания
U pk = I1н X k 100% .
U1н
5.2. Параметры схемы замещения при коротком замыкании находятся по следующим формулам:
z |
|
= |
U1k |
, r |
= |
Pk |
, X |
|
= |
z2 |
−r2 |
, cosϕ |
|
= |
|
Pk |
. |
|
|
|
|
||||||||||||||
|
I1k |
I 2 |
|
|
|
||||||||||||
|
k |
|
k |
|
|
k |
|
k |
k |
|
k |
|
U1k I1k |
||||
|
|
|
|
|
|
1k |
|
|
|
|
|
|
|
|
|
|
|
5.3. Электрические потери в трансформаторе при холостом ходе P1э = I102 r1, где r1 = rk / 2 .
Потери в стали сердечника трансформатора Pст = P0 − P1э.
Коэффициент трансформации k = U1н |
или k |
21 |
= |
U20 |
. |
|
|
||||||
12 |
U20 |
|
U1н |
|||
|
|
|
||||
Параметры схемы замещения при холостом ходе определяются по формулам:

|
|
=U1н , r |
|
P0 |
|
42 |
|
|
|
|
|
|
P0 |
|
||
z |
|
= |
, X |
|
= |
z2 |
−r2 |
, cosϕ |
|
= |
|
. |
||||
|
0 |
I10 |
0 |
|
I 2 |
|
0 |
|
0 |
0 |
|
0 |
|
U1н I10 |
||
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
Угол магнитного запаздывания δ =90o −ϕ0 .
5.4. Коэффициент мощности рабочего режима определяется по формуле
|
|
cosϕ2 = |
P2 |
|
, |
|
|
|
|
|
U2 |
|
|
|
|||
где P = P −(P + β2 |
|
I2 |
|
|
||||
P ) – активная мощность нагрузки. |
||||||||
2 1 |
0 |
k |
|
|
|
|
|
|
5.5. Процентное изменение вторичного напряжения U2 % |
||||||||
при переменной нагрузке определяется |
|
|
I2 |
|
||||
U2% = β (Uak cosϕ2 +U pk sinϕ2 ), где β = |
. |
|||||||
|
||||||||
|
|
|
|
|
|
I2н |
||
5.6. Коэффициент полезного действия трансформаторов средней и большей мощности определяется с использованием формулы
ηт = |
|
|
β Sн cosϕ2 |
|
. |
||
β S |
н |
cosϕ |
2 |
+ P + β2 |
P |
||
|
|
|
0 |
k |
|||
Значение коэффициента нагрузки, при котором ηт =ηmax , |
|||||||
определяется по формуле |
|
|
P0 . |
|
|
||
|
|
|
β = |
|
|
||
|
|
|
|
P |
|
|
|
|
|
|
|
|
k |
|
|
Контрольные вопросы
1.Как устроен однофазный трансформатор?
2.От чего зависят ЭДС обмоток трансформатора?
3.Что называется коэффициентом трансформации?
4.Что называется внешней характеристикой трансформатора и как ее получить?
5.Как найти величину процентного изменения вторичного напряжения трансформатора при заданной нагрузке?
6.Какие потери энергии имеются в трансформаторе и от чего они зависят?
7.Что называют схемой замещения трансформатора и как
43
определить ее параметры?
8.Как выполняют опыты короткого замыкания и холостого
хода?
9.Какой закон электротехники положен в основу работы трансформатора?
10.Почему магнитный поток трансформатора постоянный и не зависит от нагрузки?
11.Запишите уравнения электрического состояния трансформатора при нагрузке.
12.Как влияет характер нагрузки на напряжение вторичной обмотки трансформатора?
13.При каких условиях коэффициент полезного действия трансформатора имеет максимальное значение?
Литература
[1, 9.1 – 9.9, с. 193 – 211]
Лабораторная работа № 6
ИСПЫТАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ
Цель работы
Изучить устройство и принцип действия трехфазного асинхронного двигателя с фазным ротором. Изучить основные рабочие свойства двигателей. Приобрести навыки пуска и изменения направления вращения ротора. Изучение энергетической диаграммы асинхронного двигателя.
Основные теоретические положения
Промышленностью выпускаются две конструкции асинхронных двигателей: с короткозамкнутым и фазным ротором (контактными кольцами).
Работа асинхронных машин основана на взаимодействии вращающегося магнитного поля статора с токами в обмотке ротора. Скорость вращения ротора асинхронной машины зависит

44
не только от частоты приложенного напряжения, но и от величины нагрузки (противодействующего момента на валу).
Асинхронная машина обладает свойством обратимости и может работать как в режиме генератора, так и в режиме двигателя. Однако наибольшее практическое применение получили асинхронные двигатели. Выгодно отличаясь от других электродвигателей простотой конструкции и надежностью в работе, асинхронные двигатели в настоящее время являются основным типом электродвигателя, применяемым для привода различных механизмов в промышленности, на строительстве, в сельском хозяйстве.
Принцип действия трехфазного асинхронного двигателя
Неподвижная часть асинхронного двигателя – статор имеет трехфазную обмотку, при включении которой в сеть возника-
ет круговое вращающееся магнитное поле. Скорость вращения этого поля равна
n1 = 60Pf1 об/мин,
где f1 – частота сети; P – число пар полюсов обмотки статора
двигателя.
В расточке статора расположена вращающаяся часть двига-
теля – ротор, который состоит из вала, сердечника и обмотки.
Обмотка ротора состоит из стержней, уложенных в пазы сердечника и замкнутых с двух сторон кольцами у короткозамкнутых роторов или подсоединенных к контактным кольцам у фазных роторов.
Вращающееся магнитное поле статора пересекает проводники (стержни) обмотки ротора и наводит в них ЭДС. Но так как обмотка ротора замкнута, то в стержнях возникают токи. Взаимодействие этих токов с полем статора создает на проводниках обмотки ротора электромагнитные силы, в направлении которых начнет вращаться ротор.
Таким образом, электрическая энергия, поступающая в обмотку статора из сети, преобразуется в механическую.
Направление вращения магнитного поля статора, а следовательно, и направление вращения ротора, зависит от порядка сле-
45
дования фаз напряжения, подводимого к обмотке статора. При необходимости изменить направление вращения ротора асинхронного двигателя следует поменять местами любую пару проводов, соединяющих обмотку статора с сетью (изменить порядок следования фаз).
Скорость вращения ротора n2 асинхронного двигателя все-
гда отлична от скорости вращения поля, так как только в этом случае возможно наведение ЭДС в обмотке ротора. Относи-
тельная разность скоростей ротора и вращающегося магнит-
ного поля статора характеризуется величиной, называемой
скольжением
s = n1 −n2 . n1
Скольжение асинхронного двигателя может изменяться в пределах от 0 до 1. При этом s = 0 соответствует режиму идеального холостого хода, когда ротор двигателя и магнитное поле статора вращаются с одинаковой скоростью, а s = 1 соответствует режиму, когда ротор двигателя неподвижен (например, при пуске). Скольжение меньше нуля (отрицательное s < 0) в режиме генератора и около двух ( s ≈ 2) в режиме электромагнитного тормоза.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Так, например, для двигателей нормального исполнения мощностью от 1 до 1000 кВт номинальное скольжение приблизительно составляет соответственно 0,06 - 0,01, т. е. 6 – 1%.
Скорость вращения ротора асинхронного двигателя равна
n2 = n1 (1−s).
На щитке двигателя указывается номинальная скорость вращения в об/мин. Эта величина дает возможность определить синхронную скорость вращения n1, номинальное скольжение sн,
а также число пар полюсов обмотки статора P.
Преобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии. Эти потери делятся на механические, магнитные и электрические.
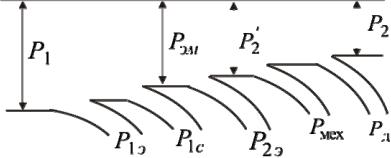
Преобразование и распределение энергии в асинхронном
46
двигателе показано на рис. 6.1.
Рис. 6.1
Из сети в обмотку статора поступает мощность P1. Часть
этой мощности расходуется на покрытие магнитных потерь в сердечнике статора P1c , а также в обмотке статора на покрытие
электрических потерь P1э, обусловленных нагревом обмотки,
P |
= m I 2 |
r , |
(6.1) |
1э |
1 1 |
1 |
|
где m1 – число фаз обмотки статора; r1 – активное сопротивление
одной фазной обмотки.
Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью
Pэм = P1 −(P1c + P1э) . |
(6.2) |
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора
P |
= m |
I 2 |
r |
= m I '2 |
r' . |
(6.3) |
2э |
2 |
2 |
2 |
1 2 |
2 |
|
Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью
P' |
= P |
− P |
. |
(6.4) |
2 |
эм |
2э |
|
|
Подставив в формулу (6.4) выражение для электрических потерь в роторе (6.3), можно записать следующее выражение полной механической мощности:
|
|
|
|
47 |
|
1−s |
|
|
|
|
1−s |
|
P' |
= m I '2 |
r' |
|
|
= P |
|
|
. |
||||
s |
|
|||||||||||
2 |
1 |
2 |
2 |
|
2э |
|
|
s |
||||
Подставим полученное выражение в формулу полной меха- |
||||||||||||
нической мощности (6.4) |
|
1−s |
|
|
|
|
|
|
|
|
||
|
P |
|
= P |
− P |
. |
|
|
|
||||
|
|
|
|
|
||||||||
|
2э |
|
|
s |
|
эм |
2э |
|
|
|
|
|
Преобразовав это уравнение и решив его относительно |
||||||||||||
электрических потерь в роторе, получим |
|
|
|
|
||||||||
|
P2э = s Pэм. |
|
|
(6.5) |
||||||||
Из формулы (6.5) видим, что мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа асинхронного двигателя более экономична при малых скольжениях.
Следует отметить, что в роторе двигателя возникают также и магнитные потери, но ввиду небольшой частоты тока ротора ( f2 = f1 s ) эти потери настолько малы, что ими обычно пренеб-
регают.
Механическая мощность на валу двигателя P2 меньше пол-
ной механической мощности |
P' |
на величину механических P |
||
и добавочных Pд потерь |
2 |
|
|
мех |
|
|
|
|
|
P = P' |
−(P |
+ P ) . |
(6.6) |
|
2 |
2 |
мех |
д |
|
Механические потери в асинхронном двигателе обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе полей рассеяния и пульсацией поля в зубцах ротора и статора.
Таким образом, полезная мощность асинхронного двигателя
P2 = P1 −ΣP,
где ΣP – сумма всех потерь в асинхронном двигателе
ΣP = P1c + P1э + P2э + Pмех + Pд.
Коэффициент полезного действия асинхронного двигателя
|
|
|
48 |
|
|
||
η |
д |
= |
P2 |
=1− |
ΣP . |
(6.7) |
|
P |
|||||||
|
|
|
P |
|
|||
|
|
|
1 |
|
1 |
|
|
В зависимости от величины мощности асинхронных двигателей их КПД при номинальной нагрузке может быть в пределах от 83 до 95% (верхний предел соответствует двигателям бóльшей мощности).
Домашнее задание
Изучить устройство и принцип действия трехфазного асинхронного двигателя с фазным ротором, ознакомиться с его рабочими свойствами и назначением пускового реостата.
Ознакомиться со стендом, измерительным комплектом и паспортными данными двигателя.
Подготовить бланк отчета, в котором начертить принципиальную схему двигателя, нагрузочного генератора и соединений измерительных приборов. Подготовить таблицы для записи результатов испытаний и расчетов, записать требуемые для расчета формулы.
Описание установки
Мнемоническое изображение асинхронного двигателя с фазным ротором приведено на макетном поле стенда. Нагрузкой двигателя служит генератор постоянного тока. Для пуска двигателя применяется пусковой реостат Rп, расположенный на стен-
де. Для размыкания цепи ротора используется автоматический выключатель SF2 . Частота тока в цепи ротора определяется по
числу колебаний стрелки амперметра, включенного в одну из фаз роторной цепи между щетками и пусковым реостатом. Ток, напряжение и мощность двигателя измеряются измерительным комплектом К505.
Порядок выполнения работы
1. Осмотреть стенд, разобранный образец асинхронного двигателя с фазным ротором, рабочую установку. Записать паспортные данные двигателя, указанные в табличке на его корпусе
49
ина макетном поле стенда.
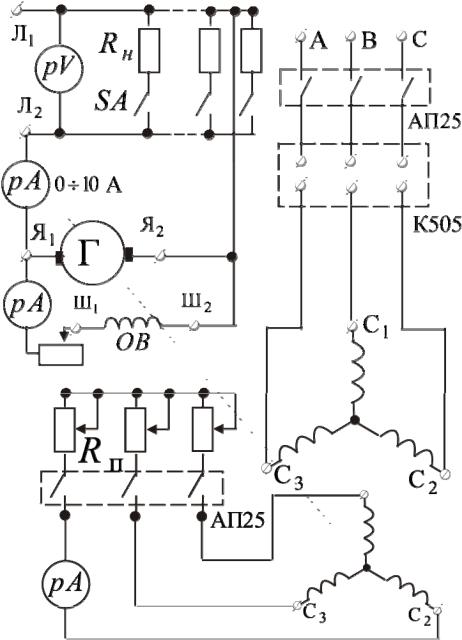
2.Собрать схему, согласно рис. 6.2.
Рис. 6.2
3.Автоматическим выключателем разомкнуть цепь ротора, подать напряжение на обмотку статора. Измерить токи, напряжения и мощности в фазах статора измерительным комплектом К505. Заполнить первый столбец табл. 6.1.
4.Отключить стенд. Замкнуть цепь ротора (АП25 включен). ВНИМАНИЕ! Пусковой реостат должен быть в положении "СТОП".