

Лабораторная по физике №5
.pdf10
Таблица 2.1 Результаты экспериментального изучения поля
двух коаксиальных цилиндров
№ |
а , м |
r , м |
, В |
ln(r / a) |
|
п/п |
|||||
|
|
|
|
||
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
3.5. Изучение электрического поля между цилиндром и проводящей плоскостью
3.5.1. Вместо большого цилиндра (кольца) к источнику питания подключите проводящую плоскость (стержень). Поместите электроды в ванне таким образом, чтобы горизонтальная ось координатной сетки ванны являлась осью симметрии, а расстояние между поверхностями электродов составляло 10–15 делений координатной оси. Малый цилиндр должен быть электродом Э1.
3.5.2.Подать напряжение на электроды.
3.5.3.Поместить зонд в точку 1, находящуюся на горизонтальной оси координатной сетки на расстоянии одного деления от цилиндра. Записать показания осциллографа и расстояние r в табл. 2.2. Отметить на рисунке точку с найденным значением потенциала. С помощью зонда найти положение еще 8–10 точек с тем же значением потенциала.
3.5.3.Провести измерения и для других точек между электродами, занося соответствующие данные в табл. 2.2.
3.5.4.С помощью вольтметра измерить напряжение U между электродами. Результат занесите в табл. 2.2.
3.5.5. |
Для |
значений |
r |
из |
|
табл. 2.2 по формуле |
|||||
|
|
2l |
|
2l |
|
|
|
|
|||
(r) U 1 |
|
ln |
|
1 |
/ ln |
|
1 |
|
, |
l |
– расстояние между элек- |
|
|
||||||||||
|
r |
|
a |
|
|
|
|
|
|||
|
|
|
|
|
|
||||||
тродами, рассчитать теоретические значения теор . Сравнивая
теоретические и экспериментальные значения , сделать вывод о соответствии теории эксперименту.
11
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.2 |
|
Результаты расчета и экспериментального изучения полям |
|||||||||||||
|
|
между цилиндром и проводящей плоскостью |
|||||||||||
|
|
а = |
м; |
|
|
l = |
м |
|
|
||||
№ |
|
r , м |
, B |
|
2l |
1 |
ln( |
2l |
1) |
|
U , В |
|
теор , B |
п/п |
|
|
|||||||||||
|
|
|
|
r |
|
r |
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.6. Методом численного дифференцирования опреде- |
||||||||||||
лить напряженность Е поля между электродами |
|
|
|||||||||||
|
3.6.1. Пользуясь данными табл. 2.1 или 2.2 (по указанию |
||||||||||||
преподавателя), построить график зависимости f (r), начиная с r а .
Таблица 2.3 Результаты расчета методом численного дифференцирования
напряженности Е поля между электродами
r , м |
, В |
|
, В |
, В |
Е , В/м |
r , м |
1 |
1 |
2 |
|
|
|
ср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.6.2. Пользуясь построенным графиком, методом численного дифференцирования найти напряженность Е поля для раз-
ных значений r , зная, что E |
|
, где = |
– – изменение |
||
|
|
||||
|
|
r |
2 |
1 |
|
|
|
|
|
||
потенциала на отрезке r r2 r1 , r = 5 мм. |
|
||||
3.6.3. Рассчитайте r |
r1 r2 |
|
для каждой последовательной |
||
|
|||||
ср |
2 |
|
|
|
|
|
|
|
|
||
пары точек из графика. Результаты расчетов занести в табл. 2.3. 3.6.4. По данным табл. 2.3 построить график зависимости
напряженности Е f (rср ) .

12
3.7. Сделать выводы о характере изменения потенциала и напряженности от расстояния.
3. ЛАБОРАТОРНАЯ РАБОТА № 2
ОПРЕДЕЛЕНИЕ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ РЕЗИСТИВНОГО ПРОВОДА
1. Цель работы
Освоение методики измерения неизвестного сопротивления методом амперметра-вольтметра и оценки погрешности электрических измерений.
2. Подготовка к работе
Прочитать в учебниках следующие параграфы: [1] ÈÈ 31, 34; [3] ÈÈ 96–98; [4] ÈÈ 40, 41. Для выполнения работы студент должен: а) знать закон Ома для участка цепи, основные характеристики электрического тока, методы их определения; б) уметь пользоваться электроизмерительными приборами; в) иметь представления о погрешностях электроизмерительных приборах.
3. Выполнение работы |
|
|
|
||||||
3.1. Описание лабораторной ус- |
2 |
|
|
||||||
тановки |
|
|
|
|
|
|
|
||
Общий вид установки представлен |
|
|
|
||||||
на рис. 3.1. Основание оснащено регу- |
|
|
|
||||||
лируемыми винтами, которые позволя- |
3 |
|
|
||||||
ют произвести выравнивание положе- |
|
|
|
||||||
ния прибора. К основанию прикреплена |
4 |
|
1 |
||||||
колонна 1 |
с |
нанесённой |
метрической |
|
|
|
|||
шкалой. На колонне смонтированы два |
|
|
|
||||||
неподвижных кронштейна 2 и один |
|
|
|
||||||
подвижный кронштейн 3, который мо- |
|
|
|
||||||
жет передвигаться |
вдоль |
колонны и |
|
|
|
||||
фиксироваться |
в |
любом |
положении. |
|
|
|
|||
Между кронштейнами натянут метал- |
|
|
5 |
||||||
лический провод 4, который прикреплён |
|
|
|
||||||
к зажимам с |
помощью винтов. Через |
6 |
7 |
8 |
|||||
контакт |
на |
подвижном |
кронштейне |
||||||
Рис. 3.1. Общий вид |
|||||||||
обеспечивается |
хорошее соединение с |
||||||||
|
установки |
||||||||
проводом. Измерительная |
часть уста- |
|
|||||||
|
|
13 |
|
|
|
новки находится в корпусе, укреплённом на основании установ- |
|||||
ки. На лицевой панели прибора смонтированы вольтметр и мил- |
|||||
лиамперметр. |
|
|
|
|
|
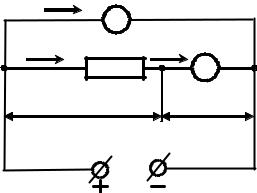
Электрическая схема прибора обеспечивает преобразование |
|||||
переменного напряжения сети в постоянное, которое через по- |
|||||
тенциометр 5 подаётся на измери- |
IV |
|
|
||
тельную цепь. С помощью пере- |
V |
|
|||
ключателя 7 осуществляется ра- |
IX |
RX |
IA |
||
бота по схеме (I) (рис. 3.2), если |
|
|
A |
||
переключатель 7 отжат, либо по |
UX |
|
UA |
||
схеме (II) (рис. 3.3), если пере- |
|
||||
|
|
|
|||
ключатель нажат. Сопротивление |
|
|
|
||
вольтметра RV = 2500 Ом. Сопро- |
|
|
|
||
тивление |
амперметра |
|
|
|
|
RA 0,15 Ом . |
Диаметр |
провода |
Рис. 3.2. Схема измерения (I) |
||
d = 0,36 мм. |
|
|
|
|
|
3.2. Методика измерений и расчёта
Сопротивление проводника в данной работе измеряется методом амперметра – вольтметра.
В схеме измерения (I) (рис. 3.2) показание вольтметра UV
равно сумме напряжений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
UV U X U A U X I A RA , |
(3.1) |
||||||||||||||||||||||
где RA – сопротивление амперметра. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Тогда неизвестное сопротивление будет равно: |
|
||||||||||||||||||||||
RX (I) |
U X |
|
UV U A |
|
UV |
RA . |
(3.2) |
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
I X |
|
|
|
I A |
|
|
|
|
|
I A |
|
|
|
|
|
|||||||
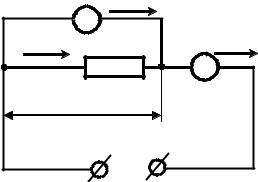
Для схемы измерения (II) (рис. 3.3) показания амперметра IA |
|||||||||||||||||||||||
соответствуют: |
|
|
|
|
|
|
|
|
|
UV |
|
|
|
|
|
|
|
||||||
I A I X IV |
|
I X |
, |
|
|
|
|
(3.3) |
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
где RV – сопротивление вольтметра. |
|
|
|
|
RV |
|
|
|
|
|
|||||||||||||
Тогда неизвестное сопротивление будет равно: |
|
||||||||||||||||||||||
RX (II) |
U X |
|
|
|
U X |
|
|
|
|
|
U X |
. |
(3.4) |
||||||||||
|
|
I |
|
|
|
|
|
|
|||||||||||||||
|
|
|
I |
|
|
|
|
|
I |
|
|
|
|
|
|
|
UV |
|
|||||
|
|
|
|
X |
|
|
A |
|
|
V |
|
|
|
I A |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
RV |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
14
Как видно из формул (3.2) и (3.4), при измерении сопротивления методом амперметра – вольтметра по схеме (I) в расчётную формулу входит сопротивление амперметра RA, а по схеме (II) – сопротивление вольтметра RV.
3.3. Погрешности измере-
IX |
V |
IV |
RX |
IA |
|
|
|
A |
|
UX=UV |
|
ний |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||
В случае, если сопротивле- |
Рис. 3.3. Схема измерения (II) |
||||||
ния приборов неизвестны, то не- |
|||||||
|
|
|
|
|
|
||
известное сопротивление рассчитывают по упрощённой формуле:
|
|
RX |
|
UV |
. |
(3.5) |
||
|
|
|
||||||
|
|
|
|
I A |
|
|
|
|
При этом возникает относительная методическая погреш- |
||||||||
ность измерения , равная: |
RX |
|
|
|
|
|||
ε |
|
RX |
|
100 % , |
(3.6) |
|||
|
|
|||||||
|
|
|
|
|
||||
|
|
|
|
|
||||
RX
где RX – истинное значение измеряемого сопротивления. Относительная методическая погрешность измерения для
схемы (I):
|
|
|
ε(I) |
|
RA |
100 % . |
|
|
(3.7) |
|||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
RX |
|
|
|
|
|
|
Относительная методическая погрешность измерения для |
||||||||||||
схемы (II): |
|
RX |
|
|
|
|
1 |
|
|
|
||
ε(II) |
|
|
100 % |
|
100 % . |
(3.8) |
||||||
R |
|
R |
|
1 |
RV |
|
||||||
|
|
X |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
RX
3.4. Подготовка установки к работе
3.4.1.Включить прибор в сеть, нажав клавишу 8 (рис. 3.1).
3.4.2.Нажать клавишу 6. Это позволяет измерять сопротивление провода по методу амперметра – вольтметра.
3.4.3.Отжать клавишу 7, если измерения ведутся по схеме (I), и нажать на клавишу 7, если измерения осуществляются по схеме (II).
3.5. Определение сопротивления провода по схеме (I)
|
|
15 |
|
|
|
|
|
3.5.1. Передвинуть подвижный |
I |
|
|
|
|||
кронштейн так, |
чтобы |
рабочая |
|
|
|
|
|
длина провода составляла более 0,6 |
|
|
|
I |
|||
его длины относительно основания. |
|
|
|
||||
3.5.2. Отжать |
клавишу |
7. По- |
|
|
|||
|
|
|
|
||||
тенциометр 5 поставить в положе- |
|
|
|||||
|
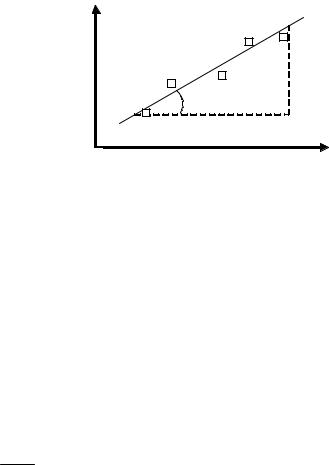
U |
|
|
||||
ние минимума снимаемого напря- |
0 |
|
|
U |
|||
жения. |
|
|
|
Рис. 3.4. Вольтамперная |
|||
3.5.3. Вращая ручку потенцио- |
|
||||||
характеристика проводника |
|||||||
метра, снять вольтамперную зави- |
|||||||
|
|
|
|
||||
симость (показания приборов для значений напряжения UV и тока IА занести в табл. 3.1).
3.5.4. Построить график вольт-амперной зависимости IА(UV), откладывая по оси абсцисс напряжение UV, по оси ординат ток, текущий через сопротивление IА (рис. 3.4). Котангенс угла наклона прямой сtg , проведённой через точки графика методом наименьших квадратов, определяет неизвестное омическое сопротивление по упрощённой формуле, без учёта падения напряжения
на амперметре RХ (I) сtg U .
I
Таблица 3.3 Результаты измерения вольт-амперной зависимости по схеме (I)
|
U , |
I , |
U , |
RX (I) , |
RX (I) , |
|
|
|
R |
, |
№ |
V |
А |
Х |
|
|
V, |
А, |
(I), |
(I) |
|
В |
А |
В |
Ом |
Ом |
% |
% |
% |
Ом |
|
|
|
|
|||||||||
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
3.5.5.Используя формулу (3.1), рассчитать напряжение UХ на неизвестном сопротивлении, результаты вычислений занести в табл. 3.1.
3.5.6.Построить график вольт-амперной зависимости IА(UХ). Котангенс угла наклона прямой сtg 1, проведённой через точки
16
графика, определяет неизвестное омическое сопротивление
RХ (I) сtg 1 U .
I
3.5.7.Рассчитать относительную погрешность измерений для различных значений тока А и напряжения V по формуле (1.3).
3.5.8.Рассчитать относительную методическую погреш-
ность (I) измерения для схемы (I) по формуле (3.7).
3.5.9. Рассчитать абсолютную погрешность измерений:
R R ε |
R(I) |
, где |
ε |
R(I) |
|
ε |
2 |
ε |
2 |
ε |
2 |
– относительная по- |
(I) |
|
|
|
|
V |
|
А |
|
(I) |
|
грешность определения сопротивления; V – максимальная относительная погрешность вольтметра; А – максимальная относительная погрешность амперметра.
3.6. Определение сопротивления провода по схеме (II)
3.6.1.Оставить подвижный кронштейн в том же положении.
3.6.2.Нажать клавишу 7. Потенциометр поставить в положение минимума снимаемого напряжения.
3.6.3.Изменяя потенциометром напряжение, снять вольтамперную зависимость. Значения UV и IА занести в табл. 3.2.
Таблица 3.2 Результаты измерения вольт-амперной зависимости
по схеме (II)
|
|
I , |
I |
R |
, |
R |
X (II) |
, |
|
|
|
R |
, |
№ |
UV, В |
А |
Х |
X (II) |
|
|
|
V, |
А, |
(II), |
(II) |
||
А |
А |
Ом |
|
Ом |
|
% |
% |
% |
Ом |
|
|||
|
|
|
|
|
|||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3.6.4. Построить график вольт-амперной зависимости IА(UV). Котангенс угла наклона сtg прямой, проведённой через точки графика, определяет неизвестное омическое сопротивление, без
учёта тока текущего, через вольтметр RХ (II) сtg U .
I

17
3.6.5. Используя формулу (3.3), рассчитать силу тока I Х через неизвестное сопротивление, результаты вычислений занести
втабл. 3.2.
3.6.6.Построить график вольт-амперной зависимости IХ(UV). Котангенс угла наклона прямой сtg 2 , проведённой через точки
графика, определяет неизвестное омическое сопротивление
RХ (II) сtg 2 |
|
U |
. |
|
|||
|
|
I |
|
3.6.7.Рассчитать относительную погрешность измерений для различных значений тока и напряжения по формуле (1.3).
3.6.8.Сравнить полученное значение сопротивления с сопротивлением вольтметра. Рассчитать относительную методическую погрешность измерения для схемы (II) по формуле (3.8).
|
3.6.9. Рассчитать |
|
абсолютную |
|
погрешность измерений: |
|||||||||
R |
|
R ε |
R(II) |
, где |
ε |
R(II) |
|
ε |
2 |
ε |
2 |
ε |
2 |
– относительная по- |
(II) |
|
|
|
|
|
V |
|
А |
|
(II) |
|
|||
грешность определения сопротивления; V – максимальная относительная погрешность вольтметра; А – максимальная относительная погрешность амперметра.
3.7. Определение удельного сопротивления провода
3.7.1.Используя схему измерения, которая даёт меньшую по-
грешность, снять зависимость тока IА от максимального напряжения UV при различных значениях рабочей длины провода , изменяя положение подвижного кронштейна. Результаты занести в табл. 3.3.
3.7.2.Построить графическую зависимость между сопротив-
лением |
R U / I и отношением длины провода |
к |
его |
сече- |
||
нию / S |
( S πd 2 / 4 ). Тангенс угла наклона прямой |
tg 3, опре- |
||||
деляет неизвестное удельное сопротивление ρ tg 3 |
|
R |
. |
|||
|
||||||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
S |
|
||
3.7.3. Рассчитать |
|
абсолютную |
|
погрешность измерений: |
||||||||||
Δρ ρ ε |
ρ |
, где |
ε |
ρ |
|
ε |
2 |
ε |
2 |
ε |
2 |
4 ε |
2 |
– относительная погреш- |
|
|
|
|
|
V |
|
А |
|
|
|
d |
|
||
ность определения удельного сопротивления; V – максимальная относительная погрешность вольтметра; А – максимальная отно-
18
сительная погрешность амперметра; – относительная погреш-
ность определения длины; d – относительная погрешность определения диаметра.
Таблица 3.3 Результаты измерений и расчета удельного сопротивления
провода
|
, м |
UV, В |
IА, А |
|
|
, м-1 |
R, Ом |
, Ом м |
|
||||||||
|
|
|
|
|
S |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
3.8. Сделайте выводы: 1) о выборе электрической схемы для определения неизвестного сопротивления проводника; 2) по справочнику определите материал проводника.
4. ЛАБОРАТОРНАЯ РАБОТА № 3
ОПРЕДЕЛЕНИЕ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ
ВЕКТОРА ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ЗЕМЛИ
1. Цель работы
Определение горизонтальной составляющей вектора индукции магнитного поля Земли с использованием закона Био – Савара – Лапласа.
2. Подготовка к работе
Прочитать в учебниках следующие параграфы: [1] ÈÈ 40, 42; [2] ÈÈ 22.1, 22.2; [4] ÈÈ 50, 51. Для выполнения работы студент должен: а) знать закон Био – Савара – Лапласа и его применение для кругового витка с током; б) уметь пользоваться электроизмерительными приборами; в) уметь рассчитать погрешности измерений.
3. Выполнение работы
3.1.Описание лабораторной установки
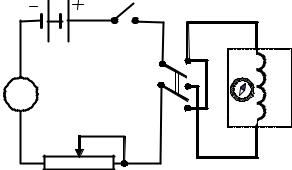
Вработе с помощью тангенс-гальванометра определяется горизонтальная составляющая вектора индукции магнитного поля Земли. Схема установки приведена на рис. 4.1. Тангенс-
19
гальванометр G состоит из катушки большого диаметра, со-
держащей |
N |
витков |
тонкой |
|
|
|
|
|||
изолированной |
проволоки, |
ук- |
|
|
|
|
||||
репленной |
на |
вращающейся |
|
K |
1 |
|
||||
подставке. |
В |
центре |
витков |
|
|
|||||
|
|
2 |
G |
|||||||
расположена маленькая |
маг- А |
П |
||||||||
1 |
||||||||||
нитная стрелка, свободно вра- |
|
|
|
|
||||||
щающаяся |
вокруг |
вертикаль- |
|
|
|
|
||||
ной оси. Стрелка помещена в |
|
|
|
|
||||||
коробочку, на дне которой рас- |
Рис. 4.1. Электрическая |
|
||||||||
положен лимб со шкалой. Для |
|
|||||||||
схема установки |
|
|||||||||
предохранения |
от |
воздушных |
|
|||||||
|
|
|
|
|||||||
потоков коробочка со стрелкой закрывается стеклянной крышкой.
3.2. Методика измерений и расчёта
Магнитное поле Земли имеет основную (постоянную) составляющую (её вклад ~ 99%, среднее значение В ~ 5 · 10–5 Тл), обусловленную конвективными токами, протекающими в жидком (металлическом) ядре, и переменную составляющую (её вклад ~ 1%), обусловленную токами в магнитосфере и ионосфере. До высот, равных ~ 3RЗ, магнитное поле Земли имеет дипольный характер, величина магнитного момента равна
РЗ 8,3 1022 А м2 . Ось диполя наклонена на 11,5‚ к оси Земли, центр диполя смещен относительно центра Земли на 1140 км в сторону Тихого океана. Северный магнитный полюс находится вблизи южного географического (южный магнитный полюс – вблизи северного географического).
В каждой точке пространства геомагнитное поле в прямоугольной системе координат характеризуется тремя элементами: горизонтальной Bг составляющей вектора В , магнитным склонением D (угол между Bг и плоскостью географического меридиана), магнитным наклонением (угол между В и плоскостью горизонта). Для г. Кемерово можно полагать значения
В5,8 10 5 Тл , Bг = 1,55 10–5 Тл.
Вцентре О кругового витка радиуса R с электрическим током I вектор магнитной индукции равен