

лабароторная по физике 5
.docxМинистерство образования и науки Российской Федерации
Федеральное Государственное бюджетное образовательное
Учреждение высшего профессионального образования
“Кузбасский государственный технический университет
имени Т. Ф. Горбачева ”
Кафедра физики
Отчет
По лабораторной работе № 5
Комплес-к 402.1
“ИЗУЧЕНИЕ ЗАКОНОВ ДВИЖЕНИЯ СИСТЕМЫ
СВЯЗАННЫХ ТЕЛ”
.
Выполнил студент группы
ХОБ-121
Преподаватель
Елкин Иван Сергеивич
|
|
Дата |
Подпись |
|
Допуск |
|
|
|
Результаты |
|
|
|
отчет |
|
|
1
1.Цель работы
Изучить уравнения и законы поступательного и враща-
тельного движения тел.
Определить экспериментально кинематические и дина-
мические характеристики движущихся тел.
2.Описание установки
Экспериментальная ус-
тановка
состоит из стойки с 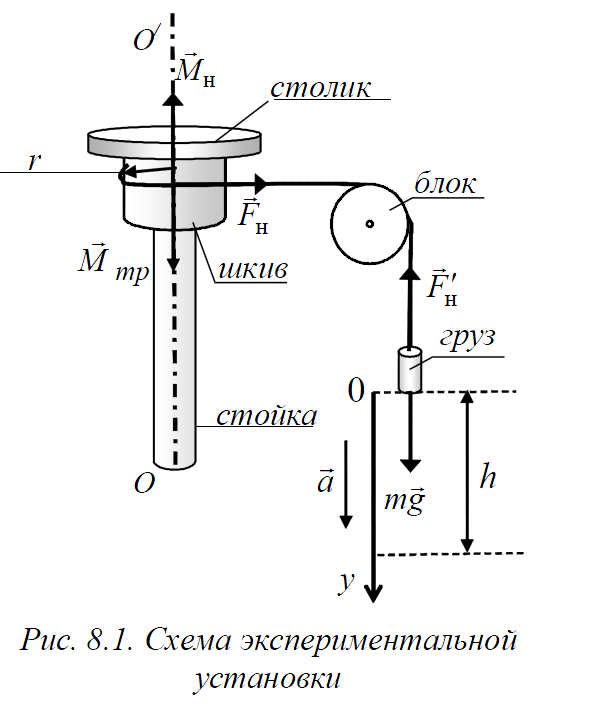
укреплённым на ней с по-
мощью подшипника шки-
вом и столика, жёстко свя-
занного со шкивом. Шкив и
столик имеют общую ось
вращения . На
шкив наматывается нить.
Ко второму концу нити,
перекинутой через блок,
подвешивается груз массой
m. Опускаясь с высоты h,
груз приводит во враща-
тельное движение шкив со
столиком. В работе изуча-
ется
движение системы связанных тел –
груза и шкива со столиком.

3.Формулы для расчета
Уравнение для координаты при равноускоренном движении

где a – ускорение груза; t – время его движения с высоты h до
пола.
Расчётные формулы для конечной скорости груза
u=
и его ускорения
a=
Расчётные формулы для кинематических характеристик
вращательного движения столика со шкивом:
 =
=
 =
=
 ε=
ε=
 =
=
 φ
φ или φ=
или φ=

где
 –
угловая скорость столика в конце его
ускоренного вра-
–
угловая скорость столика в конце его
ускоренного вра-
щения; ε – угловое ускорение столика; φ – угол поворота радиу-
са r шкива за время движения груза.
За это время столик сделает N оборотов:
N
=

Сила натяжения нити
Fн = m(g - a) .
В конце движения груз имеет скорость u, импульс P = mu;
кинетическую энергию
E кгр = mu2/2; начальная потенциальная
энергия груза Eп = mgh.
Динамическое уравнение вращательного движения столика
имеет вид
Mн+Mтр=Jἑ
где Mн= [rFн ] – момент силы натяжения нити; J – момент инер-
ции шкива со столиком; ε– их угловое ускорение.
В проекции на ось вращения ОО уравнение записыва-
ется в виде
Мн -Мтр =Jε
откуда момент инерции J столика со шкивом равен
Момент силы натяжения нити равен
Mн = mr(g - a)
где m – масса груза; а – его ускорение; r – радиус шкива.
Момент силы трения Mтр можно определить эксперимен-
тально подбором минимальной массы груза m0, при которой его
движение будет равномерным (а=0). Уравнение движения
груза для этого случая имеет вид
FНО = m0g .
Момент этой силы равен
Mтр = MНО = m0gr .
Кинетическая энергия в конце ускоренного движения равна
Ekст=
Работа момента сил трения за время ускоренного вращения
столика будет определяться
Aтр = Mтрφ
|
№ П/п |
t, c |
<t>, c |
u, м/c |
a, м/c2 |
ω, c-1 |
Ε, c-2 |
φ, рад |
N, Об. |
|
||||||||
|
1 |
|
|
|
|
|
|
|
|
|||||||||
|
2 |
|
||||||||||||||||
|
3 |
|
||||||||||||||||
|
4 |
|
||||||||||||||||
|
5 |
|
||||||||||||||||
|
r= м |
M= кг |
H= м |
|||||||||||||||
Кинематические характеристики движения груза и шкива со столиком (таблица 1)
Кинематические характеристики движения груза
и шкива со столиком и телом (таблица 2)
|
№ П/п |
t, c |
<t>, c |
u, м/c |
a, м/c2 |
ω, c-1 |
Ε, c-2 |
φ, рад |
N, Об. |
|
||||||||
|
1 |
|
|
|
|
|
|
|
|
|||||||||
|
2 |
|
||||||||||||||||
|
3 |
|
||||||||||||||||
|
4 |
|
||||||||||||||||
|
5 |
|
||||||||||||||||
|
|
|
|
|||||||||||||||



. По формуле рассчитайте момент силы трения
Mтр для каждого опыта;
. По формуле рассчитайте момент инерции столи-
ка со шкивом J1 (значение углового ускорения ε1 возьмите из
табл.1) и системы столик со шкивом – тело J2. Момент инерции
тела Jтела находится как разность J2 и J1:
Jтела = J2 - J1.
Рассчитайте теоретическое значение момента инерции тела:
-
для стержня Jтеор=

где mст – масса стержня; l – его длина;
-
для диска Jтеор=
где mд – масса диска; R – его радиус.
Результаты расчёт динамических характеристик
поступательного движения груза (таблица 3)
|
Условия опытов |
a |
Fн |
u |
P |
Eк гр |
Eп |
|
м/с2 |
Н |
м/c |
Кг м/c |
Дж |
Дж |
|
|
Без тела на столе |
|
|
|
|
|
|
|
С телом на столе |
|
|
|
|
|
|
Расчёт динамических характеристик
вращательного движения столика (таблица 4)
|
Характеристики
Условия Опытов
|
Мн |
m0 |
Mтр |
J1 |
J2 |
Jтеор |
Eкст |
Атр |
L |
|
Н м |
кг |
Нм |
Кгм2 |
Кгм2 |
Кгм2 |
Дж |
Дж |
|
|
|
Без тела на столиике |
|
|
|
|
|
|
|
|
|
|
С телом на столике |
|
|
|
|
|
|
|
|
|

Вывод: