

ЭО
.pdfРисунок 8 - Cxeмa к расчету нагрузок на рабочее оборудование при копании поворотом ковша
31

3.2.3 Определение реактивных сил и давлений в гидроцилиндре стрелы при копании гидроцилиндром ковша
Реактивные силы в гидроцилиндре стрелы (кН) определяются из уравнения статического равновесия сил относительно шарнира А (рисунок 8)
Р01 l01А Gк lкА Gр lАр Gс lсА Рцср lцсА 0,
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рцср |
|
Р |
|
lА |
(G |
|
lА G |
|
lА G |
|
lА) |
|
|
|
|
01 |
01 |
|
к |
к |
р |
р |
с |
с |
0, |
(32) |
|
|
|
|
|
|
|
|
lцсА |
|
|
|
|
|
|
Реактивное давление (МПа) определяются из выраже-
ния
Рр
рцс 10цс3 F ,
где F - площадь поршня гидроцилиндра стрелы (М2), на которую действует рцс (МПа).
Силы Рцср и давления рцс определяются с учетом
действия сил Р01 в точках (1...n) на траектории движения зуба при повороте ковша от 0° до к max для двух расчетных положений:
-стрела предельно опущена, рукоять максимально отвернута;
-копание на глубине 2/3 от максимальной, головной шарнир стрелы на уровне стоянки экскаватора, ось рукояти вертикальна.
Результаты расчетов сводятся в таблицы и строятся графики.
32

3.3Расчет активных и реактивных сил и давлений
вгидроцилиндрах рабочего оборудования при копании гидроцилиндром рукояти
3.3.1 Определение активных сил на зубьях ковша
Расчетное положение рабочего оборудования (рисунок 9): стрела предельно опущена; рукоять максимально отвернута и линия, соединяющая ось шарнира ковша и режущей кромки зуба, является продолжением оси рукояти.
Активная сила на режущей кромке ковша, развиваемая гидроцилиндром рукояти, определится из ∑Мв= 0 (рисунок 9) и составит
Результаты расчетов сводятся в таблицу и строится график.
Р01 |
Рцр lцрВ |
Gк |
lкВ Gр lрВ |
(33) |
|
|
. |
||
|
|
lРВ01 |
|
|
3.3.2 Определение реактивных сил и давлений в гидроцилиндре ковша
Из ∑Мо= 0 получим
Р01 |
Т lо G |
|
lо |
т |
к |
к , |
|
|
lк |
|
|
а из∑Мс= 0
Т Рцк lсцк . lст
33

Имея в виду, что Рцк=рцкF, решим совместно последние два уравнения и получим
|
|
1 |
|
р |
цк |
F |
|
lо |
lс |
|
|
||||
Р01 |
|
|
|
|
цк |
т |
|
|
цк |
|
о |
||||
|
|
|
|
|
|
|
с |
|
|
|
|
Gк lк , |
|||
|
|
lк |
|
|
|
|
lт |
|
|
|
|
|
|
||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
(Р |
01 |
l |
|
G |
|
lо) lс |
(34) |
||||
|
цк |
|
|
F |
к |
lс |
|
к |
к т . |
||||||
|
|
|
|
|
|
|
|
|
|
lо |
|
|
|||
|
|
|
|
|
|
|
|
цк |
цк |
т |
|
|
|||
3.3.3 Определение реактивных сил и давлений в гидроцилиндрах стрелы
Из ∑МА = 0 (рисунок 9) сила реакции гидроцилиндра стрелы
р |
Р01 l01А |
(Gс lсА Gр lрА Gк г lкА г) |
. |
(35) |
Рцс |
|
lцсА |
||
|
|
|
|
|
Реактивное |
давление рцс Рцс / F , где F |
- рабочая |
||
площадь гидроцилиндров стрелы, кг.
Расчетные положения рабочего оборудования:
-стрела максимально опущена, а рукоять предельно отвернута; линия зева ковша на продолжении оси рукояти (т.4к рисунок 9);
-головной шарнир стрелы на уровне стоянки, копание на глубине 2/3 от максимальной; линия зева ковша на продолжении оси рукояти.
Результаты расчетов сводятся в таблицу и строится
график.
34

3.3.4 Определение активной силы на ковше по условию устойчивости экскаватора
Возможное усилие Р01 на зубьях ковша по условию устойчивости экскаватора относительно точки Д (рисунок 9) определяется при условии равенства моментов опрокидывающего Мо и удерживающего Му, т.е. при Ку = 1.
Удерживающий момент будет равен
Муд Gпп lппд Gх lдх,
где Gпп - сила веса поворотной платформы (кН), действующая на плече lдпп (м); Gх - сила веса ходового оборудования (кН), действующая на плече lдх (м).
Опрокидывающий момент относительно ребра опрокидывания (гусеница, колесо, выносные опоры) при P02 = 0 определится из выражения (рисунок 9)
Мо Р01(а lР01 ) Gк г(а lкА г) Gр(lАр а)
Gс(lсА а) Р01(а lР01 ) Мо.
Имея ввиду, что Му = Мо, из последнего уравнения можно найти предельное значение силы копания на зубьях коша из условия опрокидывания экскаватора.
Р01 |
Мо МG . |
(36) |
|
а lР |
|
|
01 |
|
35
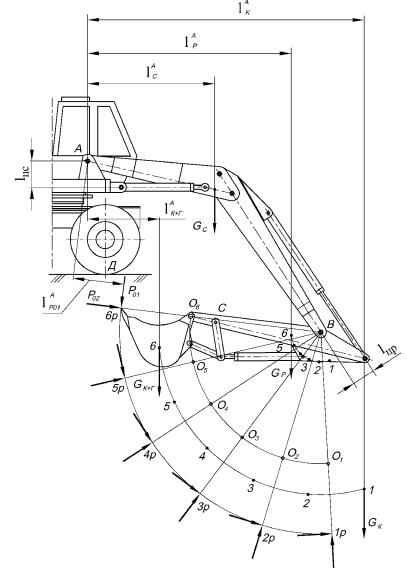
Рисунок 9 - Схема к расчету нагрузок на рабочее оборудование при копании поворотом ковша гидроцилиндром рукояти
36

3.4 Определение активной силы гидроцилиндров подъема стрелы
Активная сила, развиваемая гидроцилиндрами подъема стрелы, может быть найдена из уравнения ∑МА = 0 (рисунок 9) и составит
Рцс |
Gс lсА Gр lрА Gк г lкА г |
. |
(37) |
|
lцс |
||||
|
|
|
Определяется она для следующих расчетных положений:
-стрела максимально опущена; рукоять подвернута на 30°; ковш заполнен грунтом III категории и повернут на угол, при котором грунт не высыпается; начало подъема;
-подъем ковша с глубины Нк=(2/3)Нк max, головной шарнир стрелы на уровне стоянки машины; рукоять подвернута на угол 30°; линия зева ковша горизонтальна;
-подъем груженого рабочего оборудования с уровня стоянки экскаватора, рукоять подвернута на 1/3, а ковш подвернут на
угол к (2 / 3) кmax ;
-ковш с грунтом на максимальном вылете;
-стрела максимально поднята, рукоять горизонтальна, ковш подвернут.
37

4. РАСЧЕТ ПАРАМЕТРОВ МЕХАНИЗМА ПОВОРОТА
Общий расчет поворотного механизма состоит в определении необходимой мощности поворотного движения Nп и мощности двигателя Nдв.п, выборе двигателя и кинематическом расчете передаточного механизма.
Исходные данные для расчета:
-расчетный угол поворота п, град (рад);
-расчетное время поворота tп, с;
-момент инерции поворотной части экскаватора с груженым Jг и порожним Jп ковшом, т∙м2;
-максимально возможная угловая скорость поворота
max (при номинальной скорости двигателя дв.н).
При угле п < 90° имеет место двухпериодный режим поворота, состоящий из периодов разгона и торможения, а в случае 90° ≤ п < 360° будет трехпериодный режим поворота характерный наличием разгона, движения с постоянной максимальной угловой скоростью поворота и торможения.
Момент инерции, т∙м2, поворотной части при вылете ковша обратной лопаты равном 2/3 от максимального, может быть найден по эмпирической зависимости [1, с.234]:
с груженым ковшом
Jг 1,2 3 m5э ,
m5э ,
с порожним ковшом
Jп Jг mг rг2,
где mэ, mг - массы соответственно ковша и грунта в ковше, т; rг - радиус центра масс грунта в ковше на расчетном вылете, м.
38

Момент, необходимый для осуществления двухпериодного поворота платформы экскаватора, можно найти из выражения [1]
Мдmax iп |
J |
cp |
|
п |
а |
ср |
е2 |
|
|
|
|
п , |
(38) |
||||
|
|
|
|
|
tп2 |
|
|
|
где Jcp = 0,5(Jг+Jп); 'п - заданный угол поворота в одном направлении, рад; acp – коэффициент внешней характеристики двигателя; п - кпд механизма поворота; принимается
п = 0,75...0,8; [tn] - допустимая (заданная) продолжительность поворота, с; е - коэффициент пропорциональности; принимается для приводов с гидродвигателем е=3,45 ... 4,05; iп - передаточное число поворотного механизма.
Коэффициент, зависящий от характеристики двигателя, определяется из выражения [1]
аср |
агср апср |
п |
1 п , |
(39) |
|
2 |
2 |
|
|
где - коэффициент, учитывающий влияние инерции вращающихся масс поворотного механизма; принимается = 0,05...0,1 для тихоходных высокомоментных гидродвигателей и = 0,1...0,15 для быстроходных низкомоментных гидродвигателей. Продолжительность поворота (сек.) для предварительного расчета может быть принята из выражения
[tп] tпг |
tпп (0,3...0,35) tца |
5 |
mэ , |
(40) |
|
|
|
mэа |
|
где tца и mэа - продолжительность рабочего цикла, с, и масса экскаватора-аналога, т.
После подсчета Мд.max iп, его необходимо проверить по условию, что приведенный к поворотной платформе движущий момент не превышает предельного момента сил сцепления движителя с грунтом, т.е.
39

М |
i |
М |
сц |
РпК |
mэgf K , |
(41) |
|
дmax п п |
|
2 |
2 |
|
|
|
|
|
|
|
где Рп - сопротивление повороту движителя, Н; К - колея, м; mэ - масса экскаватора, кг; g = 9,81 м/с2; f = 0,3...1 - коэффициент сопротивления повороту, принимается тем больше, чем меньше радиус поворота.
Если условие (41) удовлетворяется, то можно провести расчет максимальной угловой скорости поворота (рад/с), соответствующей моменту окончания периода разгона tр по зависимости
|
|
С Мдmax iп п , , |
(42) |
max |
г(п)max |
Jcp aг(п)ср |
|
|
|
|
где С - коэффициент пропорциональности, принимаемый для приводов с гидродвигателями равный в среднем 0,8...1,0; 'п - полное угловое перемещение поворотной платформы в одном направлении при двухпериодном движении, включающем разгон и торможение, рад.
Здесь коэффициент, зависящий от внешней характеристики привода, определится из выражения
|
|
|
|
(1 )( |
1 |
) |
|
|
aг(п)ср |
aрг(п) aтг(п) |
|
п |
п |
|
(43) |
||
|
, |
|||||||
|
2 |
2 |
|
|
||||
|
|
|
|
|
|
|
||
где |
Jг 1 1 |
Jп и находится в пределах = 0,05...0,25 |
||||||
|
Jcp |
|
Jcp |
|
|
|
|
|
[1]; знак «плюс» перед соответствует Jг, а знак «минус» - Jп. При постоянном моменте Мд.max iп максимальная мощность поворотного движения будет соответствовать концу
разгона платформы при обратном вращении
Nпmax Мдmax iп пmax п. |
(44) |
40