

7.3. Мп с фиксированной системой команд
В п. 3 уже рассматривались принципы функционирования элементарного гипотетического микропроцессора (термин "микропроцессор" и "процессор" далее используются как синонимы). Между тем для изучения принципов функционирования даже простейшей микроЭВМ необходимо выбрать конкретный тип процессора с конкретной системой команд и управляющих сигналов. Примером простейшего универсального процессора (т.е. процессора с универсальной системой команд) аккумуляторного типа является I8080 (отечественный аналог КР580ВМ80А), выпущенный Intel в 1974 году. В этом же году на процессоре I8080 был спроектирован компьютер "Альтаир 8800", который некоторые эксперты называют первым персональным компьютером в истории развития техники. Именно это поколение 8-разрядных МП (I8080, I8085, Z80 и др.) стало широко применяться в управляющих микроЭВМ, контроллерах АСУ ТП, микрокомпьютерах общего назначения и в учрежденческой деятельности, в основном для обработки текстов.
Процессор I8080 имеет 8-разрядное АЛУ и УУ, выполненные на одном кристалле, содержащем около 5000 транзисторов. БИС МП имеет 40 выводов. Управляющее устройство выполнено на ПЛМ и недоступно пользователю, т.е. процессор имеет фиксированную систему команд. Напряжение питания ±5 В и +12 В. МП имеет двухфазную синхронизацию (F1и F2) при тактовой частоте до 2,5 МГц и следующие шины:
ША – 16-разрядная. Используется для адресации:
ОЗУ, ПЗУ (команды R/W) – 16 разрядов (адресное пространство составляет 64 К);
ПУ (команды I/O) – 8 разрядов (256 адресов);
ШД – 8-разрядная, двунаправленная. Используется:
для приема операндов и команд от памяти и ПУ;
выдачи данных (результатов) в память и ПУ;
ШУ – отдельно не оформлена и имеет 10 линий, по которым передаются 4 входных и 6 выходных сигналов.
Условное обозначение МП на схемах приведено на рис. 7.4.
Рассмотрим коротко, без подробных пояснений, назначение управляющих сигналов, учитывая, что ряд входных и выходных сигналов образуют как бы пары, отвечая за те или иные действия МП.
Управление прерыванием
INT– входной сигнал запроса прерываний от ПУ, воспринимаемый МП после выполнения текущей команды. Сигнал не воспринимается, если МП находится в режиме захвата или запрещения прерывания.
INTE– выходной сигнал разрешения прерывания. Этот сигнал отражает состояние внутреннего триггера "разрешение прерывания", который устанавливается только программно.
Управление режимом ожидания
READY– входной сигнал готовности, который сообщает о готовности устройства вести обмен с МП. При его отсутствии МП переходит в состояние ожидания. Позволяет синхронизировать работу МП и более медленной памяти или ПУ. Сигнал READY может задаваться как с ПУ, так и со вспомогательного таймера. В простейших устройствах этот вход не используется и подключается через сопротивление к источнику +5 В.
WAIT– выходной сигнал ожидания, подтверждающий, что МП находится в режиме ожидания.
Управление обменом информации
HOLD (HLD)– входной сигнал захвата шин от ПУ. Переводит буферы (см.с.78) ША и ШД МП в состояние Z , т.е. МП отключается от шин. Это позволяет ПУ занимать магистраль для инициализации обмена
HLDA– выходной сигнал подтверждения состояния захвата МП.
У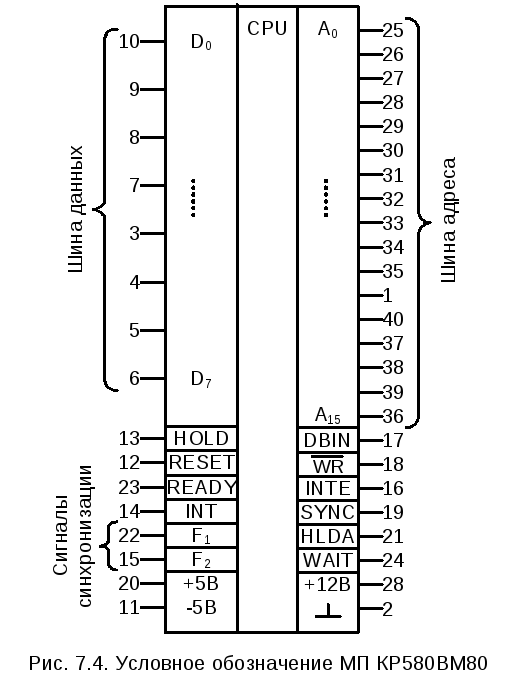 правление
чтением/записью
правление
чтением/записью
DBIN– выходной сигнал приема. Указывает памяти и ПУ, что ШД находится в режиме приема информации в МП, т.е. в режиме чтения.
![]() –выходной сигнал
выдачи. Используется для управления
выдачей информации из МП в память и ПУ
(режим записи). Активным является
–выходной сигнал
выдачи. Используется для управления
выдачей информации из МП в память и ПУ
(режим записи). Активным является
![]() = 0.
= 0.
Управление счетчиком команд
RESET– входной сигнал сброса. Устанавливает в 0 счетчик адреса команд.
Синхронизация
SYNC– выходной сигнал синхронизации. Указывает на начало каждого нового машинного цикла.
F1, F2– синхропоследовательности, определяющие такт работы МП. Задаются кварцованным генератором.
Упрощенная функциональная схема МП изображена на рис. 7.5. На схеме изображены только функциональные связи между основными узлами МП. Цепи передачи управляющих сигналов, порождающих соответствующие микрооперации в узлах МП, на рисунке отсутствуют. В скобках указана разрядность устройств МП.