

1.4. Классификация систем автоматического управления
1.4.1. Классификация по физической природе сигналов в регуляторе
Электрические, пневматические, гидравлические, электропневматические и электрогидравлические.
1.4.2. Классификация по принципу регулирования
Разомкнутые, замкнутые, комбинированные.
1.4.3. Классификация по цели управления (назначению)
1.4.3.1.
Системы стабилизации,
в которых задающее воздействие является
постоянной величиной
![]() .
.
1.4.3.2.
Системы программного управления,
в которых задающее воздействие
![]() является
известной, наперед заданной функцией
времени.
является
известной, наперед заданной функцией
времени.
1.4.3.3.
Следящие системы,
в которых задающее воздействие
![]() заранее неизвестно.
заранее неизвестно.
1.4.4. Классификация по характеру сигналов в системе
1.4.4.1. Непрерывные САУ – такие системы, в каждом из звеньев которых непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины. Для этого необходимо, чтобы статические характеристики всех звеньев системы были непрерывными.
Примеры статических характеристик звеньев непрерывных САУ приведены на рисунке 1.17. Здесь e, r – соответственно входной и выходной сигналы звеньев.
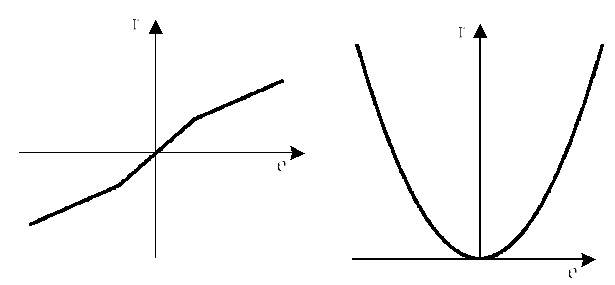
а) б)
Рисунок 1.17
1.4.4.2.
Системы с гармоническим модулированным
сигналом. У
элементов такой системы входной и
выходной величинами является переменное
напряжение некоторой частоты
![]() ,
называемой несущей частотой. Регулятор
осуществляет модуляцию напряжения,
т.е. в простейшем случае амплитуда
(огибающая) и фаза напряжения изменяются
соответственно величине и знаку выходного
сигнала регулятора (рис. 1.18).
,
называемой несущей частотой. Регулятор
осуществляет модуляцию напряжения,
т.е. в простейшем случае амплитуда
(огибающая) и фаза напряжения изменяются
соответственно величине и знаку выходного
сигнала регулятора (рис. 1.18).

Рисунок 1.18
1.4.4.3. Дискретные САУ – такие системы, в которых выходной сигнал хотя бы одного звена (элемента) представляет собой последовательность импульсов, один из параметров которой (высота, длительность, период) зависит от значений входного сигнала в дискретные моменты времени. В дискретных САУ осуществляется квантование сигнала по времени; по уровню и смешанное – по уровню и по времени.
При квантовании по времени происходит преобразование непрерывных сигналов в дискретные через равные промежутки времени. Если при этом изменяется высота импульсов, а их длительность остается неизменной (рис. 1.19), то такой способ преобразования называется амплитудно-импульсной модуляцией.
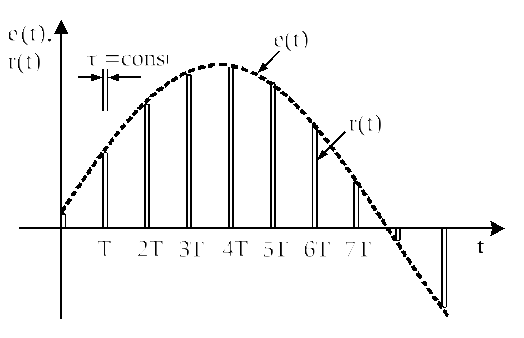
Рисунок 1.19
Если, наоборот, изменяется длительность импульсов, а их высота остается неизменной (рис. 1.20), то такой способ преобразования называется широтно-импульсной модуляцией.
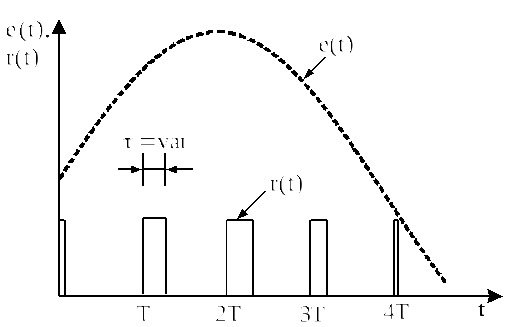
Рисунок 1.20
При
квантовании
по уровню
происходит преобразование непрерывного
сигнала в дискретные с выделением
значений непрерывного сигнала в момент
пересечения им равностоящих уровней
![]() (рис. 1.21).
(рис. 1.21).
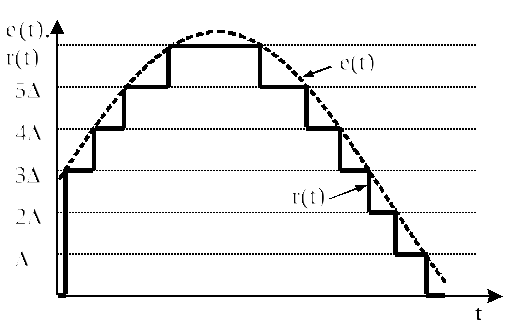
Рисунок 1.21
При смешанном квантовании происходит преобразование непрерывного сигнала в дискретные через равные промежутки времени, но при этом выделяется ближайший уровень непрерывного сигнала (рис. 1.22).

Рисунок 1.22
В зависимости от типа квантования дискретные САУ разделяют на импульсные, релейные и цифровые. В импульсных САУ происходит квантование по времени, в релейных – по уровню, в цифровых – смешанное квантование. Соответственно элементы, осуществляющие квантование, называются импульсными элементами (звеньями), релейными элементами (реле) и цифровыми вычислительными устройствами.