

Билет 35.Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. Схема асинхронной машины показана на рис. 2. 15. В схеме асинхронной машины и ее принципе действия есть сходство с трансформатором. Отличие заключается в том, что вторич ная обмотка размещается на вращающемся роторе и не связана с внешней сетью. На схеме рис. 2. 15, а эта обмотка состоит из стержней, замкнутых накоротко, что соответствует двигателю с короткозамкнутым ротором, а в двигателях с фазовым ротором она соединяется с внешними сопротивлениями — рис. 2. 15, б.
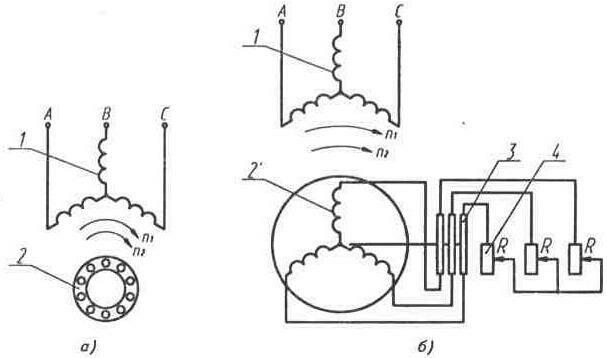
Рис. 2. 15. Схемы асинхронной машины:
а) асинхронный двигатель с короткозамкнутым ротором; 6) асинхронный двигатель с фазным ротором; 1 — обмотки статора, 2 — ротор с короткозамкнутыми стержнями, 2 — обмотки фазного ротора, 3 — контактные кольца, 4— сопротивления в цепи фазного ротора.
Обмотка статора равномерно распределена по его окружности. Обмотки фаз статора соединяются в звезду или в треугольник.
При питании трехфазной обмотки статора трехфазным током, создается вращающееся магнитное поле, частота вращения которого
n1=60f1/p
где f1 — частота тока питающей сети, Гц, р — число пар полюсов обмотки статора.
Вращающийся магнитный поток Ф индуцирует в обмотках статора и ротора ЭДС E1 и E2. Под действием ЭДС E2, в обмотке ротора возникает ток I2 при взаимодействии которого с магнитным полем создается электромагнитный вращающий момент М. Величина ЭДС ,E2; и частота ее изменения f2 зависят от скорости пересечения магнитным полем статора Ф витков обмотки ротора. Частоту вращения поля ротора обозначим n2.
Частота пересечения магнитным полем статора обмотки ротора является относительной частотой поля статора относительно ротора и равна разности n1— n2. Если разность равна 0, то нет движения поля статора относительно ротора, нет ЭДС E2 и тока I2 и вращающего момента М. При увеличении разности n1 — n2 величины E2, l2, f2 и М увеличиваются.
Условием работы асинхронной машины является неравенство частот вращения поля статора и ротора, поэтому машина и называется асинхронной, т. е. несинхронной.
Относительная разность частот вращения поля статора и ротора
s=n1-n2/n1
называется скольжением. Выражение частоты вращения ротора через скольжение:
n2 =n1(1-s).
Билет 36. Механическая характеристика асинхронного двигателя
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы. n= f(М) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы (10.41) и схемы замещения.
С помощью схемы замещения (см. рис. 10.17) определяют приведенный ток фазы ротора:
(10.49)
|
I'2 = |
U1ф |
, | |||
|
√ |
(r1 + |
r'2 |
) + (x1 + x'2)2 | ||
|
|
s |
| |||
где
|
r'2 |
= r'2 + |
r'2(1 - s) |
. |
|
s |
s |
Полученное значение тока I'2 nподставляют в уравнение момента (10.41), в котором предварительно I2 и r2 заменяют через их приведенные значения:
(10.50)
|
M = |
3I22r2 |
= |
3I'22r'2 |
. |
|
ω0s |
ω0s |
После подстановки получим
(10.51)
|
M = |
3U1ф2r'2 |
= |
| ||
|
ω0s [(r1 + |
r' |
)2 + (x1 + x'2)2] |
| ||
|
|
s |
|
| ||
|
| |||||
|
Рис. 10.18. Механическая характеристика асинхронного двигателя | |||||
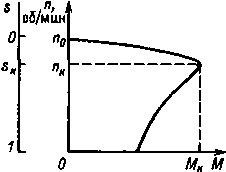
Выражение (10.51) представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя — постоянны 1 и не зависят от s и М.Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид, изображенный на рис. 10.18.
1 Сопротивление r2 зависит от частоты f2 и, следовательно, от s, но для двигателей общего назначения изменение r2 незначительно.
Однако необходимо отметить, что после включения двигателя в нем происходят сложные переходные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя в период разбега может существенно отличаться от статической.
Одной из важных точек характеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр , sкр , Mmax . Значение критического скольжения sкр , при котором двигатель развивает максимальный (критический) момент Мmax, легко определить, если взять производную dM/ds выражения (10.51) и приравнять ее нулю.
После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид:
(10.52)
|
sкр = ± |
r'2 |
. |
|
√r12 + xк2 |
где хк = x1 + х'2.
Подставив sкр вместо s в уравнение (10.51), получим выражение максимального момента
(10.53)
|
Мmax = |
3U1ф2 |
. |
|
2ω0(r1 ± √r12 + xк2) |
Необходимо отметить, что из выражений (10.51) — (10.53) вытекает следующее. Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.