

Методичка_по_физике_Шабалин_3
.pdfА.Н.Огурцов
ФИЗИКА ДЛЯ СТУДЕНТОВ
КОЛЕБАНИЯ И ВОЛНЫ
ЛЕКЦИИ ПО ФИЗИКЕ
5
http://sites.google.com/site/anogurtsov/lectures/phys/
http://www.ilt.kharkov.ua/bvi/ogurtsov/ln.htm
Полное или частичное копирование и тиражирование текста в некоммерческих образовательных целях разрешается и приветствуется. Автор.

5–2
Свободные колебания
1.Колебания. Общий подход к изучению колебаний различной физической природы.
Колебаниями называются движения или процессы, которые обладают определенной повторяемостью во времени.
Колебания сопровождаются попеременным превращением энергии одного вида в энергию другого вида.
Колебания называются свободными (или собственными), если они совершаются за счет первоначально сообщенной энергии, без дальнейшего внешнего воздействия на колебательную систему (систему, совершающую колебания). Колебания называются вынужденными, если они происходят под действием периодически изменяющейся внешней силы.
Физическая природа колебаний может быть разной – различают механические, электромагнитные и др. колебания.
Но различные колебательные процессы описываются одинаковыми уравнениями, поэтому целесообразно изучать все колебательные процессы, используя общие свойства колебаний.
2. Гармонические колебания и их характеристики.
Гармоническими колебаниями называются колебания, при которых колеблющаяся физическая величина изменяется по закону синуса (или косинуса).
Различные периодические процессы (процессы, повторяющиеся через равные промежутки времени) могут быть представлены в виде суммы (суперпозиции) гармонических колебаний.
Гармоническое колебание величины s описывается уравнением типа s = A cos(ωt + ϕ) ,
где: A – амплитуда колебания – максимальное значение колеблющейся величины;
ω – круговая (циклическая) частота;
ϕ – начальная фаза колебания в момент времени t = 0 ; (ωt + ϕ) – фаза колебания в момент времени t .
Фаза колебания определяет значение колеблющейся величины в данный момент времени. Так как косинус изменяется в пределах от +1 до –1, то s может принимать значения от +A до −A.
Поскольку cos(a + 2π) = cos a , то при гармонических колебаниях
увеличение (приращение) фазы колебания на 2π приводит к тому, что все величины, характеризующие колебание, принимают исходное значение.
Периодом колебаний T называется наименьший промежуток времени, по истечении которого повторяются состояния колеблющейся системы (совершается одно полное колебание) и фаза колебания получает
приращение 2π
ω(t +T ) + ϕ = (ωt + ϕ) + 2π.
Откуда
5–3
T = 2ωπ .
Частотой колебаний n называется величина обратная периоду колеба-
ний – число полных колебаний, совершаемых в единицу времени n = T1 = 2ωπ .
Единица частоты – герц (Гц) – частота периодического процесса, при котором за 1 секунду совершается один цикл колебаний.
3. Дифференциальное уравнение гармонических колебаний.
Первая (скорость) и вторая (ускорение) производные по времени от гармонически колеблющейся величины s также совершают гармонические колебания с той же циклической частотой
s = ddst = −Aωsin(ωt + ϕ) = Aωcos(ωt + ϕ+ π2 ) ,
s= d2 s = −Aω2 cos(ωt + ϕ) = Aω2 cos(ωt + ϕ+ π) . d t2
Из последнего уравнения видно, что s удовлетворяет уравнению
d2 s |
2 |
2 |
d t2 |
+ ω s = 0 или |
s +ω s = 0 . |
Это уравнение называется дифференциальным уравнением гармонических колебаний. Его решение
s = A cos(ωt +ϕ) .
4. Метод векторных диаграмм.
Гармонические колебания изображаются графически методом вращающегося вектора амплитуды или методом векторных диаграмм.
Из произвольной точки O , выбранной на оси x , под углом ϕ, равным начальной фазе
колебания, откладывается вектор A, модуль
которого равен амплитуде A, рассматриваемого колебания. Если этот вектор будет вращаться вокруг точки O с угловой скоростью ω, то проекция вектора на ось x будет
совершать колебания по закону s = A cos(ωt +ϕ) .
5. Экспоненциальная форма записи гармонических колебаний.
Согласно формуле Эйлера для комплексных чисел eiϕ = cos ϕ+isin ϕ,
где i =  −1 – мнимая единица. Поэтому уравнение гармонического колебания s = A cos(ωt + ϕ) можно записать в комплексной экспоненциальной форме
−1 – мнимая единица. Поэтому уравнение гармонического колебания s = A cos(ωt + ϕ) можно записать в комплексной экспоненциальной форме
s = Aei(ωt+ϕ) .
Физический смысл имеет только вещественная часть комплексной функции
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |

5–4
~s , которая и представляет собой гармоническое колебание
Re(s) = Acos(ωt +ϕ) = s .
6. Механические гармонические колебания.
Пусть материальная точка совершает прямолинейные гармонические колебания вдоль оси x около положения равновесия принятого, за начало координат. Тогда для колеблющейся точки
смещение: x = A cos(ωt +ϕ) , |
|
|
|
|
ωt +ϕ+ |
π |
, |
скорость: υ= x = −Aωcos |
|
||
|
|
2 |
|
ускорение:
a = υ= s = Aω2 cos(ωt + ϕ+ π) .
Амплитуды скорости и ускорения равны
Aω и Aω2 .
Фаза скорости отличается от фазы смещения на π2 , а фаза ускорения на π.
Сила, действующая на колеблющуюся материальную точку массой m равна
F = ma = m Aω2 cos(ωt + ϕ+ π) = −mω2 Acos(ωt + ϕ) = −mω2 x .
Таким образом, сила пропорциональна смещению материальной точки и направлена в сторону, противоположную смещению (к положению равновесия). Такая зависимость от смещения характерна для упругих сил и поэтому силы, которые аналогичным образом зависят от смещения, называются
квазиупругими.
7. Энергия материальной точки, совершающей гармонические колебания.
Кинетическая энергия материальной точки
K = |
mυ2 |
= mA2ω2 sin2 |
(ωt + ϕ) = mA2ω2 |
[1 −cos 2(ωt + ϕ)]. |
|
||||
2 |
2 |
4 |
|
|
Потенциальная энергия материальной точки, совершающей гармонические колебания под действием квазиупругой силы
x |
2 |
2 |
2 |
ω |
2 |
2 |
ω |
2 |
W = −∫F d x = |
mω x |
|
= mA |
cos2 (ωt + ϕ) = mA |
|
[1 + cos 2(ωt + ϕ)] . |
||
2 |
|
|
|
|
||||
0 |
|
2 |
|
4 |
|
|
||
|
|
|
|
|
|
|
|
|
Полная энергия |
|
|
|
E = K +W = mA2ω2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
остается постоянной, с течением времени происходит только превращение кинетической энергии в потенциальную и обратно.
8. Гармонический осциллятор.
Гармоническим осциллятором называется система, совершающая колебания, описываемые дифференциальным уравнением
s +ω2s = 0 .
5–5
Примерами гармонического осциллятора являются пружинный, математический и физический маятники и электрический колебательный контур.
9. Пружинный маятник.
Пружинный маятник – это груз массой m , подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы
F = −kx ,
где k − жесткость пружины. |
|
||
Уравнение движения маятника |
|
||
mx = −kx или x + |
k |
x = 0 . |
|
m |
|||
|
|
||
Сравнивая это уравнение с уравнением движения
гармонического осциллятора s +ω2s = 0 , мы видим, что пружинный маятник совершает колебания по закону x = A cos(ωt + ϕ) с циклической частотой и периодом
ω= |
k |
, |
|
T = 2π |
m . |
|||
|
|
|||||||
|
|
m |
|
|
|
|
k |
|
Потенциальная энергия пружинного маятника |
||||||||
U = |
mω2 x2 |
= |
kx2 |
. |
|
|||
|
|
|
||||||
|
|
2 |
|
2 |
|
|
||
Если на маятник действует сила трения, |
пропорциональная скорости |
|||||||
Fтр = −rx , где r − коэффициент сопротивления, |
то колебания маятника будут |
|||||||
затухающими, и закон движения маятника будет иметь вид mx = −kx − rx или x + mr x + mk x = 0 .
10. Математический маятник.
Математическим маятником называется идеализированная система, состоящая из материальной точки массой m , подвешенной на невесомой нерастяжимой нити длинной l , и колеблющейся под действием силы тяжести без трения.
Хорошим приближением математического маятника является небольшой тяжелый шарик, подвешенный на тонкой длинной нити.
При малых углах отклонения α можно считать x ≈ lα. Возвращающая сила
F = Psin α ≈ mgα = mg xl .
Уравнение движения |
|
|
|
|
|
mx = −F = −mg |
x |
или |
x + |
g |
x = 0 . |
l |
|
||||
|
|
|
l |
||
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |
5–6
Следовательно, движение математического маятника описывается дифференциальным уравнением гармонических колебаний, то есть происходит по закону x = A cos(ωt + ϕ) с частотой и периодом, соответственно
ω= |
g |
, |
T = 2π |
l |
. |
l |
|
||||
|
|
|
g |
||
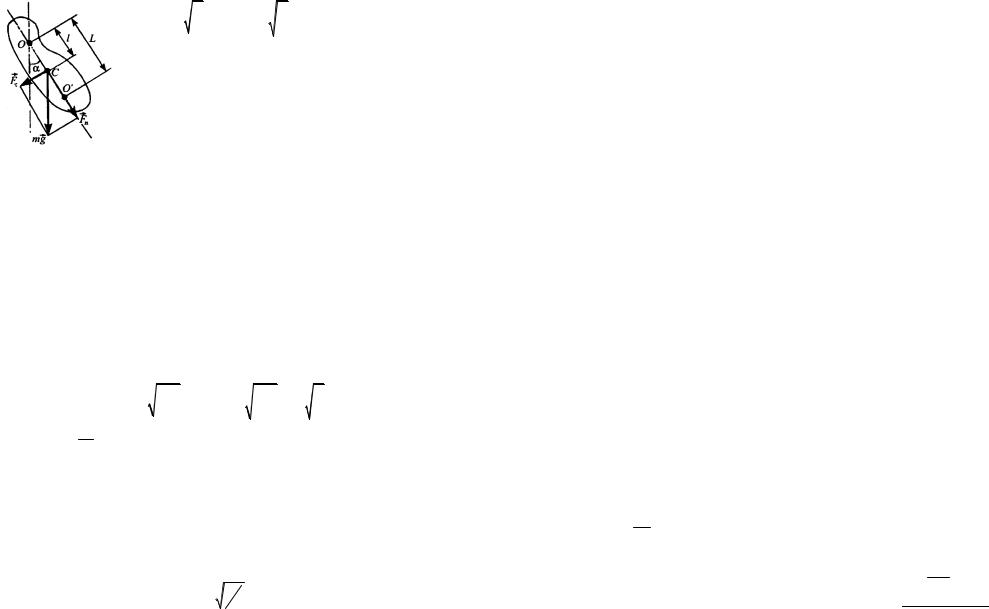
11. Физический маятник.
Физическим маятником называется твердое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси подвеса, не проходящей через центр масс тела.
Если физический маятник отклонен из положения равновесия на некоторый угол α, то момент
возвращающей силы
M = Jβ = Jα.
С другой стороны, при малых углах
M = Fτl = −mgl sin α ≈ −mglα,
где J − момент инерции маятника относительно оси, проходящей через точку подвеса O ,
l − расстояние между точкой подвеса и центром масс C маятника,
Fτ = −mg sin α – возвращающая сила (со знаком
минус, поскольку она всегда направленная противоположно направлению увеличения α).
Следовательно,
α+ mglJ α = 0 .
Таким образом, при малых колебаниях физический маятник совершает гармонические колебания α = α0 cos(ωt + ϕ) с циклической частотой и периодом
ω= |
mgl |
, |
T = 2π |
J |
= 2π |
L |
. |
J |
mgl |
|
|||||
|
|
|
|
g |
|||
где длина L = mlJ – называется приведенной длиной физического маятника.
Приведенная длина физического маятника – это длина такого математического маятника, который имеет такой же период колебаний, что и данный физический маятник.
Точка O' на продолжении прямой OC , отстоящая от оси подвеса на расстоянии приведенной длины L , называется центром качаний физического маятника.
Математический маятник можно представить как частный (предельный) случай физического маятника, вся масса которого сосредоточена в его центре
масс. При этом J = ml 2 , следовательно
T = 2π l |
g |
. |
|
|
5–7
12. Электрический колебательный контур.
Электрическим колебательным контуром называется электрическая цепь, состоящая из включенных последовательно катушки индуктивностью L , конденсатора емкостью C и резистора
сопротивлением R .
По закону Ома для участка цепи
IR = ϕ −ϕ |
2 |
+ Θ |
c |
или |
IR = − |
q |
− L d I , |
|||
|
||||||||||
1 |
|
|
|
|
|
C |
d t |
|||
|
|
|
|
|
q |
|
|
|||
где q и (ϕ −ϕ |
) = − |
– |
заряд конденсатора и |
|||||||
|
||||||||||
1 |
|
2 |
|
|
C |
|
|
|
||
|
|
|
|
|
|
|
|
|||
разность потенциалов его обкладок в произвольный момент времени t ; R −
электрическое |
сопротивление |
колебательного контура; Θc − ЭДС само- |
||||||
индукции в |
катушке. Сила |
тока |
I = d q |
, поэтому дифференциальное |
||||
|
|
|
|
|
|
d t |
|
|
уравнение колебаний заряда в колебательном контуре |
||||||||
|
d2 q |
+ |
R d q |
+ |
1 |
q = 0 . |
||
|
d t2 |
|
|
|
||||
|
L d t |
LC |
||||||
|
|
|
|
|||||
13. Стадии колебаний в идеализированном колебательном контуре.
Идеализированный колебательный контур – колебательный контур, у
которого R = 0 .
Пусть в начальный момент времени |
t = 0 конденсатор |
заряжен |
зарядом q . Тогда энергия электрического поля |
между обкладками |
конден- |
сатора We = q2 . При замыкании конденсатора на катушку индуктивности, в
2C
контуре потечет возрастающий ток I . Энергия электрического поля начнет
уменьшаться, а энергия магнитного поля катушки Wm = LI22 = Lq2 2 будет
возрастать. Поскольку потерь в контуре нет ( R = 0 ), то полная энергия
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |
5–8
W =We +Wm сохраняется.
В момент времени t = 14 T (T −период колебаний), когда конденсатор
полностью разрядится, энергия электрического поля обращается в нуль, а энергия магнитного поля (а следовательно, и ток) достигает наибольшего значения.
Стадии колебаний в контуре можно сопоставить с аналогичными стадиями механических колебаний, например, математического маятника, который в
момент времени t = 0 смещен из |
положения равновесия и имеет |
максимальную потенциальную энергию |
E =Umax . В момент времени t = 14 T |
смещение маятника равно нулю, скорость – максимальна, и потенциальная энергия полностью переходит в кинетическую энергию маятника E = Kmax .
Начиная с момента времени t = 14 T , ток в контуре будет убывать,
следовательно, магнитное поле катушки начнет ослабевать. Изменение магнитного поля вызовет индукционный ток, который, по правилу Ленца, будет иметь то же направление, что и ток разрядки конденсатора. Конденсатор
начинает перезаряжаться и к моменту времени  заряд на обкладках
заряд на обкладках
конденсатора достигнет максимума, ток в цепи прекратится, и энергия контура снова будет равна энергии электрического поля в конденсаторе.
Для маятника это будет соответствовать максимальному смещению в направлении, противоположном первоначальному, остановке маятника в крайнем положении ( υ= 0 ) и обратному превращению кинетической энергии в потенциальную.
Далее, все процессы в колебательном контуре будут протекать в обратном направлении и система к моменту времени t =T придет в первоначальное состояние.
Таким образом, в колебательном контуре происходят периодические изменения заряда q на обкладках конденсатора и силы тока
электрические колебания сопровождаются превращением электрического и магнитного полей.
Из сравнения электрических колебаний с механическими колебаниями, следует, что:
энергия электрического поля конденсатора аналогична потенциальной энергии маятника,
энергия магнитного поля катушки аналогична кинетической энергии маятника,
сила тока в контуре аналогична скорости движения маятника,
индуктивность L выполняет функцию массы,
сопротивление R играет роль силы трения, действующей на маятник.
14.Свободные гармонические колебания в колебательном контуре.
Свободные электрические колебания в колебательном контуре являются
гармоническими, если его электрическое сопротивление R = 0 . Дифференциальное уравнение свободных гармонических колебаний
заряда в контуре
d2 q |
+ |
1 |
q = 0 . |
|
d t2 |
LC |
|||
|
|
5–9
Заряд q совершает гармонические колебания по закону
q = qmax cos(ωt + ϕ) ,
с циклической частотой
ω = LC1
и периодом
T = 2π  LC ,
LC ,
Эта формула называется – формула Томсона.
В формуле Томсона qmax – амплитуда колебаний заряда. Сила тока в колебательном контуре
I = d q = −ωq sin(ωt +ϕ) = I |
max |
cos |
|
ωt +ϕ+ |
π |
|
d t |
max |
|
|
|
|
|
|
|
|
|
|
2 |
|
опережает по фазе колебания заряда q на π 2 .
2 .
Здесь Imax = ωqmax = qmaxLC – амплитуда силы тока.
Разность |
потенциалов обкладок конденсатора U = ϕ2 −ϕ1 |
также |
|||||
изменяется по гармоническому закону и совпадает по фазе с зарядом q |
|
||||||
|
|
U = |
q |
|
=Umax cos(ωt +ϕ) , |
|
|
|
qmax |
C |
|
||||
|
|
|
|
|
|||
где Umax = |
– амплитуда разности потенциалов. Амплитуда тока |
|
|||||
C |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Imax =Umax |
C . |
|
||
|
|
|
|
|
|
L |
|
Величина |
L C называется |
волновым сопротивлением |
колеба- |
||||
тельного контура. |
|
|
|
||||
15. Сложение гармонических колебаний.
Если система одновременно участвует в нескольких колебательных процессах, то под сложением колебаний понимают нахождение закона, описывающего результирующий колебательный
процесс.
Для сложения колебаний x1 и x2
x1 = A1 cos(ωt +ϕ1), x2 = A2 cos(ωt +ϕ2 )
используем метод вращающегося вектора амплитуды (метод векторных диаграмм).
Так как векторы A1 и A2 вращаются с одинаковой угловой скоростью ω, то разность фаз (ϕ2 −ϕ1) между ними остается постоянной. Уравнение результирующего колебания будет
x = x1 + x2 = Acos(ωt +ϕ) ,
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |
5–10
где амплитуда A и начальная фаза ϕ задаются соотношениями
A2 = A2 |
+ A2 |
+ 2 A A cos(ϕ |
2 |
−ϕ ), |
tg ϕ = |
A1 sin ϕ1 |
+ A2 sin ϕ2 |
. |
|
|
|
||||||||
1 |
2 |
1 |
2 |
1 |
|
A1 cos ϕ1 |
+ A2 cos ϕ2 |
||
|
|
|
|
|
|
|
|||
Сумма двух гармонических колебаний одного направления и одинаковой частоты есть гармоническое колебание в том же направлении и с той же частотой, что и складываемые колебания.
Амплитуда результирующего колебания зависит от разности фаз складываемых колебаний:
1)ϕ2 −ϕ1 = ±2mπ, где (m = 0,1,2,...) , тогда A = A1 + A2 ;
2)ϕ2 −ϕ1 = ±(2m +1)π, где (m = 0,1,2,...) , тогда A = A1 − A2 .
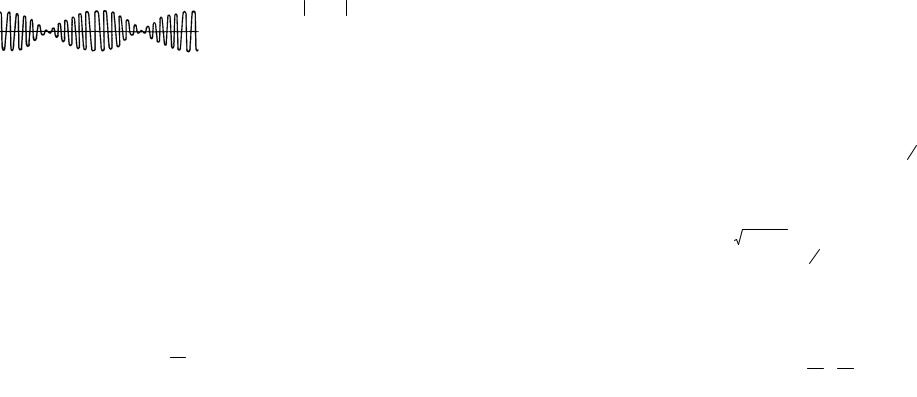
16.Биения.
Биениями называются периодические изменения амплитуды колебания, возникающие при сложении двух гармонических колебаний с близкими частотами.
Пусть амплитуды складываемых колебаний равны A, а частоты равны ω и ω+ Δω, причем ω<< ω. Путь для простоты начало отсчета выбрано так, чтобы начальные фазы обоих колебаний были равны нулю
x1 = Acos ωt, |
x2 = Acos(ω+ Δω)t . |
||
Результирующее |
|
колебание |
|
будет иметь вид |
Δωt |
|
|
x = 2 Acos |
|
cos ωt |
|
|
2 |
|
|
– гармоническое колебание с частотой ω, амплитуда которого изменяется по
закону A |
|
Δωt |
|
с частотой ω |
= Δω (частота биений вдвое |
|
= |
2Acos |
|
||||
биений |
|
|
2 |
|
биений |
|
|
|
|
|
|
|
|
больше частоты изменения косинуса, поскольку Aбиенийберется по модулю).
17. Разложение Фурье.
Любое сложное периодическое колебание s = f (t) можно представить в виде суммы простых гармонических колебаний с циклическими частотами, кратными основной циклической частоте ω0
s = f (t) = A0 + ∑n Am cos(mω0t + ϕm ) .
2 m=1
Такое представление периодической функции f (t) называется
разложением ее в ряд Фурье или гармоническим анализом сложного
периодического колебания.
Члены ряда Фурье, соответствующие гармоническим колебаниям с циклическими частотами ω0 , 2ω0 , 3ω0 и т. д., называются первой (или
основной), второй, третьей и т. д., гармониками сложного периодического колебания s = f (t) .
Совокупность этих гармоник образует спектр колебания s = f (t) .
5–11
18.Сложение взаимно перпендикулярных гармонических колебаний одинаковой частоты.
Пусть два гармонических колебания одинаковой частоты ω, происходят во взаимно перпендикулярных направлениях вдоль осей x и y . Для простоты
выберем начало отсчета так, чтобы начальная фаза первого колебания была равна нулю
x = Acos ωt, y = Bcos(ωt +α) ,
где α − разность фаз колебаний, а A и B – их амплитуды. Уравнение траектории результирующего колебания (исключая t из уравнений) есть уравнение эллипса, произвольно расположенного относительно координатных осей,
|
x2 |
− |
2xy |
cos α + |
y2 |
=sin |
2 |
α, |
|
|
|
A2 |
AB |
B2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|||
и такие колебания называются эллиптически поляризованными. |
|
|
||||||||
19. Линейно поляризованные колебания. |
|
|
|
|
|
|
||||
|
|
|
|
|
|
Если разность |
фаз |
равна |
||
|
|
|
|
|
α = mπ(m = 0, ±1, ± 2,…) , |
то |
||||
|
|
|
|
|
эллипс |
вырождается |
в отрезок |
|||
прямой
y = ±B A x ,
где знак плюс соответствует нулю и четным значениям m , а знак минус – нечетным значениям m .
Результирующее колебание является гармоническим колебанием с
частотой ω и амплитудой |
A2 + B2 и |
совершается |
вдоль |
|
прямой, |
|
составляющей с осью x угол |
ϕ = arctg(B A cos mπ) . |
Такие колебания |
||||
называются линейно поляризованными колебаниями. |
|
|
|
|
||
20. Циркулярно поляризованные колебания. |
|
|
|
|
|
|
Если |
разность |
фаз |
α = (2m +1) |
π |
, где |
|
|
|
|
|
|
2 |
|
(m = 0, ±1, ± 2,…) , то уравнение траектории
x2 + y2 =1. A2 B2
Это уравнение эллипса, оси которого совпадают с осями координат, а его полуоси равны соответствующим амплитудам A и B .
Если A = B , то эллипс вырождается в окружность, и такие колебания называются циркулярно поляризованными или колебаниями, поляризованными по кругу.
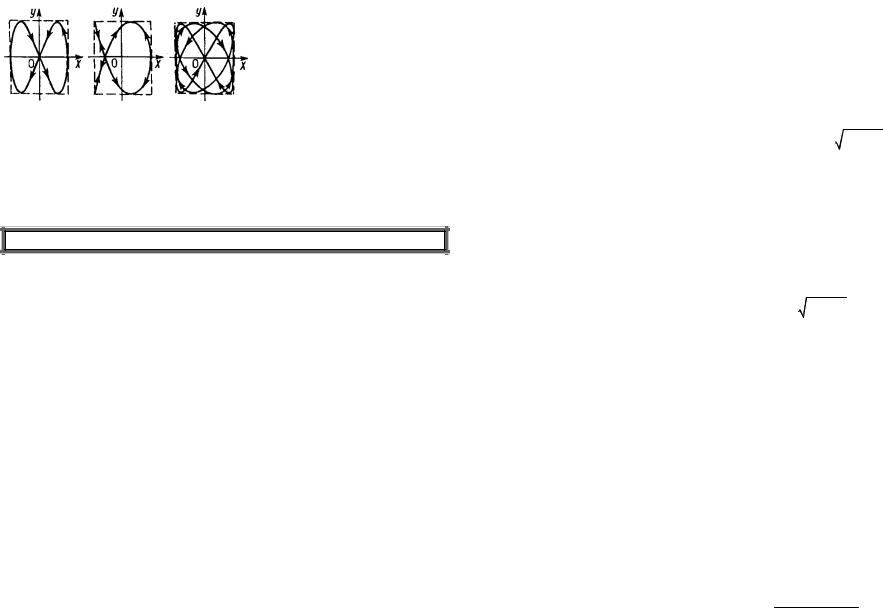
21. Фигуры Лиссажу.
Если взаимно перпендикулярные колебания происходят с циклическими частотам pω и qω, где q и p – целые числа
x = Acos( pωt), y = Bcos(qωt +α) ,
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |
5–12
то значения координат x и y одновременно повторяются через одинаковые промежутки времени T0 равные наименьшему общему кратному периодов
T1 = 2pπω и T2 = q2ωπ колебаний вдоль осей x и y . Траектории замкнутых
кривых, которые получаются в этих случаях, называются фигурами Лиссажу. Вид этих кривых зависит от соотношения амплитуд, частот и разности фаз складываемых колебаний. На рисунке показан вид фигур Лиссажу при трех различных значениях отноше-
ния (2:1, 3:2, 4:3) и разности фаз α = π2 .
Затухающие и вынужденные колебания
22. Затухающие колебания.
Затуханием колебаний называется постепенное ослабление колебаний с течением времени, обусловленное потерей энергии колебательной системой.
Затухание механических колебаний вызывается главным образом трением. Затухание в электрических колебательных системах вызывается тепловыми потерями и потерями на излучение электромагнитных волн, а также тепловыми потерями в диэлектриках и ферромагнетиках вследствие электрического и магнитного гистерезиса.
Закон затухания колебаний определяется свойствами колебательных систем.
Система называется линейной, если параметры, характеризующие те физические свойства системы, которые существенны для рассматриваемого процесса, не изменяются в ходе процесса.
Линейные системы описываются линейными дифференциальными уравнениями.
Различные по своей природе линейные системы описываются одинаковыми уравнениями, что позволяет осуществлять единый подход к изучению колебаний различной физической природы.
23.Дифференциальное уравнение свободных затухающих колебаний линейной системы
Дифференциальное уравнение свободных затухающих колебаний
линейной системы имеет вид
d2 s |
+ 2δ |
d s |
2 |
|
|
+ω s = 0 , |
|
d t2 |
|
d t |
0 |
где s − колеблющаяся величина,
δ = const – коэффициент затухания,
ω0 − циклическая частота свободных незатухающих колебаний той же колебательной системы (при δ = 0 ).
5–13
В случае малых затуханий (δ2 << ω02 )
решение этого уравнения:
s = A0 e−δt cos(ωt +ϕ) ,
где:
A = A e−δt |
– амплитуда зату- |
0 |
|
хающих колебаний,
A0 – начальная амплитуда,
ω= ω2 |
−δ2 |
– циклическая |
0 |
|
|
частота затухающих колебаний.
Промежуток времени τ = 1δ, в течение которого амплитуда затухающих
колебаний уменьшается в e раз называется временем релаксации. Затухание нарушает периодичность колебаний.
Затухающие колебания не являются периодическими.
Однако если затухание мало, то можно условно пользоваться понятием периода затухающих колебаний как промежутка времени между двумя последующими максимумами колеблющейся физической величины
T = |
2π |
= |
2π |
. |
ω |
|
|||
|
|
ω02 −δ2 |
||
24. Декремент затухания.
Если A(t) и A(t +T ) – амплитуды двух последовательных колебаний, соответствующих моментам времени, отличающихся на период, то отношение
A(t) |
= eδT |
|
A(t +T ) |
||
|
называется декрементом затухания, а его логарифм
θ = ln |
A(t) |
= δT = T |
= |
1 |
|
A(t +T ) |
N |
||||
|
τ |
|
называется логарифмическим декрементом затухания.
Здесь N амплитуды в e раз.
25. Добротность колебательной системы.
Добротностью колебательной системы называется безразмерная величина Q , равная произведению 2π на отношение энергии W (t) колебаний
системы в произвольный момент времени t к убыли этой энергии за промежуток времени от t до t +T (за один условный период затухающих колебаний)
Q = 2π W (t) . W (t) −W (t +T )
Энергия W (t) пропорциональна квадрату амплитуды A(t) , поэтому
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |

5–14
Q = 2π |
A2 (t) |
= |
|
2π |
= |
|
2π |
|
. |
||
|
|
−e−2δT |
|
−e−2θ |
|||||||
|
A2 (t) − A2 (t +T ) 1 |
1 |
|
|
|||||||
При малых значениях логарифмического декремента затухания (θ 1) |
|||||||||||
1 −e−2θ ≈ 2θ, поэтому (принимая T ≈T ) |
|
Q = π = πN = |
π |
|
= ω0 . |
||||||
|
|
|
|||||||||
|
0 |
|
|
θ |
|
|
|
δ T |
|
2δ |
|
|
|
|
|
|
|
|
|
||||
26. Примеры свободных затухающих колебаний
Рассмотрим затухающие колебания различной физической природы:
1)механические колебания – пружинный маятник с массой m , который совершает малые колебания под действием упругой силы F = −kx и силы трения Fтр = −rx ( r – коэффициент сопротивления)
2)электромагнитные колебания – колебания в колебательном
контуре состоящем из сопротивления R , индуктивности L и емкости C Будем сравнивать оба случая с дифференциальным уравнением
свободных затухающих колебаний линейной системы s + 2δs + ω20 s = 0 ,
решение которого имеет вид
s= A0 e−δt cos(ωt + ϕ) .
1)пружинный маятник 2) колебательный контур
колеблющаяся вели- |
смещение относительно |
|
|
|
|
|
|
|
|
заряд q |
|||||||||||||||||||||
чина |
|
положения равновесия x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
дифференциальное |
|
r |
|
|
|
|
k |
|
R |
|
|
|
1 |
|
|
|
|||||||||||||||
уравнение колебаний |
x + |
|
|
x |
+ |
|
|
|
x = 0 |
q + |
L q + |
|
|
|
|
q |
= 0 |
||||||||||||||
m |
m |
LC |
|||||||||||||||||||||||||||||
частота незатухающих |
ω0 = |
|
|
|
k |
|
|
|
ω0 = |
|
1 |
|
|
|
|
|
|
|
|
||||||||||||
колебаний ω0 |
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
LC |
|
|
|
|
|||||||||
коэффициент |
δ = |
|
|
r |
|
|
|
|
|
|
|
δ = |
|
R |
|
|
|
|
|
|
|
|
|
|
|
||||||
затухания δ |
|
2m |
|
|
|
|
|
|
|
|
|
2L |
|
|
|
|
|
|
|
|
|
|
|||||||||
частота |
затухающих |
|
|
|
|
k |
|
|
|
|
r2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
R2 |
|
|
|||||
колебаний |
ω= |
|
|
|
− |
ω= |
|
|
|
|
|
|
− |
|
|
||||||||||||||||
ω= ω2 |
−δ2 |
|
|
|
m |
4m2 |
|
|
|
|
LC |
|
4L2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
добротность Q |
|
|
|
|
km |
|
|
|
|
|
1 |
|
|
L |
|
|
|
|
|
||||||||||||
Q = |
|
|
|
r |
|
|
|
|
|
|
|
Q = R |
|
|
C |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
закон колебаний |
x = A e−δt cos(ωt + ϕ) |
q = q e−δt cos(ωt + ϕ) |
|||||||||||||||||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||||
27. Вынужденные колебания.
Чтобы в реальной колебательной системе получить незатухающие колебания, надо компенсировать потери энергии. Такая компенсация возможна
спомощью какого-либо периодически действующего фактора X (t) ,
изменяющегося по гармоническому закону
X (t) = X0 cos ωt .
А.Н.Огурцов. Физика для студентов
5–15
В случае механических колебаний таким фактором является вынуждающая силаF = F0 cos ωt . Закон движения для пружинного маятника
будет иметь вид
mx = −kx − rx + F0 cos ωt .
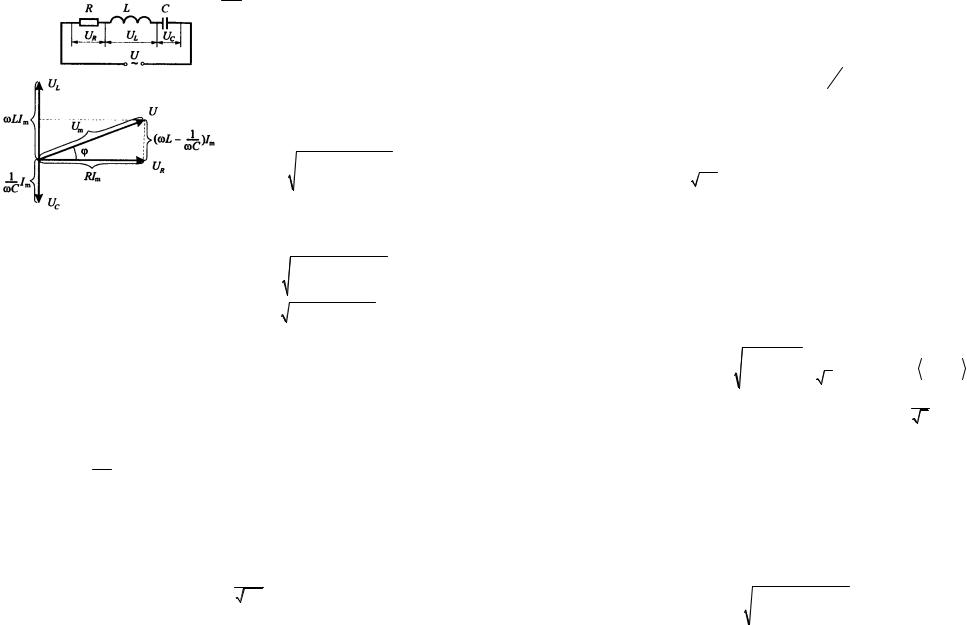
В случае электрического колебательного контура роль X (t) играет подводимая к контуру внешняя ЭДС или переменное напряжение U =Um cos ωt . Уравнение колебаний в контуре будет иметь вид
q + RL q + LC1 q = ULm cos ωt .
В общем виде дифференциальное уравнение вынужденных колебаний имеет вид
s + 2δs +ω02s = x0 cos ωt .
Это уравнение – линейное неоднородное дифференциальное уравнение. Его решение равно сумме общего решения s = A0 e−δt cos(ωt + ϕ) однородного
уравнения и частного решения неоднородного уравнения. Можно показать, частное решение имеет вид
s = Acos(ωt +ϕ) ,
где A и ϕ задаются формулами
A = |
|
x0 |
|
, |
ϕ = arctg |
2δω |
|
|
|
|
|
. |
|||
(ω2 |
−ω2 )2 |
+ 4δ2ω2 |
ω02 −ω2 |
||||
|
0 |
|
|
|
|
|
|
Так для электромагнитных колебаний, если обозначить α – сдвиг по фазе между зарядом и приложенным напряжением, то можно показать, что
решение дифференциального уравнения будет иметь вид q = qm cos(ωt −α) ,
где |
|
|
|
|
Um |
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
qm = |
|
|
|
|
|
|
|
|
|
|
, |
tgα = |
|
|
|
. |
|
||||
|
|
2 |
|
|
|
1 |
|
2 |
1 |
−ωL |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ω |
R |
|
+ ωL |
− |
|
|
|
|
|
|
|
|
ωC |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
ωC |
|
|
|
|
|
|
|
|
|
|
||||
Сила тока при установившихся колебаниях |
|
|
|
|
|
|
|||||||||||||||
I = d q = −ωq |
m |
sin(ωt −α) = I |
m |
cos(ωt −α + π |
2 |
) |
, |
||||||||||||||
d t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
|
|
|
|
|
|
|
|
|
Um |
|
|
|
|
|
|
|
|
||
|
|
Im = ωqm = |
|
|
|
|
|
|
|
|
. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
R |
2 |
|
|
ωL − |
1 |
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωC |
|
|
|
|
||
Силу тока можно записать в виде |
|
I = Im cos(ωt −ϕ) , где |
ϕ = α − π2 – |
||||||||||||||||||
сдвиг по фазе между током и приложенным напряжением. Тогда можно показать, что
|
|
π |
|
1 |
|
ωL − |
1 |
|
|
|
|
ωC |
|
||||
tg ϕ = tg |
α − |
|
= − |
|
= |
|
. |
|
tg α |
R |
|
||||||
|
|
2 |
|
|
|
|
Колебания и волны
5–16
28. Резонанс.
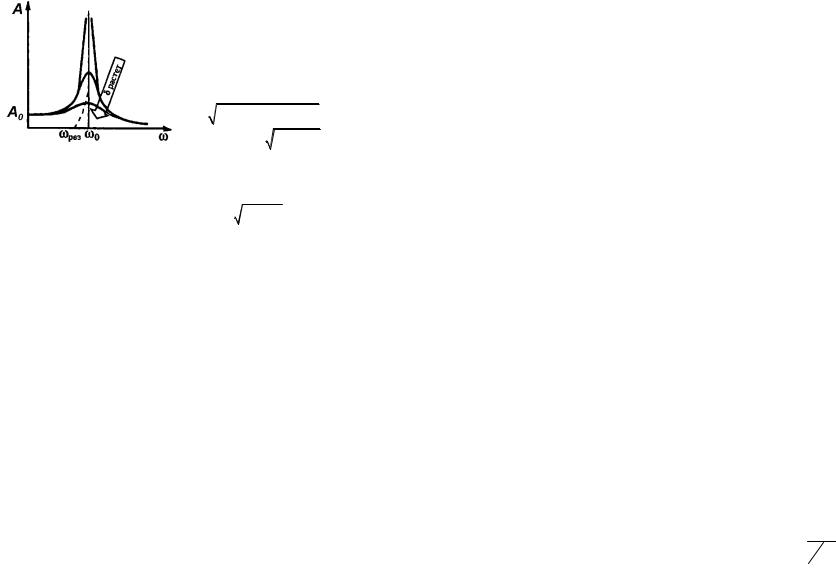
Резонансом называется явление резкого возрастания амплитуды вынужденных колебаний при приближении частоты вынуждающей силы (или, в случае электрических колебаний, частоты вынуждающего переменного напряжения) к частоте, равной или близкой собственной частоте колебательной системы.
Амплитуда вынужденных колебаний
|
|
A = |
|
|
|
|
x0 |
|
|
|
|
имеет максимум при |
|||||
|
|
|
2 |
|
2 |
2 |
|
|
2 2 |
|
|||||||
|
|
|
|
(ω −ω ) |
|
+ 4δ ω |
|
|
|
|
|||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
частоте ω |
рез |
= |
|
ω2 |
−2δ2 |
, которая называется |
|||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||
резонансной |
частотой. |
(Первая |
|
производная |
знаменателя |
||||||||||||
(−4(ω2 −ω2 )ω+8δ2ω= 0) обращается в нуль при ω2 = ω2 |
−2δ2 .) |
|
|
|
|||||||||||||
0 |
|
|
|
|
|
x0 |
|
|
|
0 |
|
|
|
|
|||
|
|
Aрез = |
|
|
|
|
. |
|
|
|
|
|
|
||||
|
|
|
2δ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
ω2 −δ2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
x0 |
|
|
При ω→0 , амплитуда достигает предельного значения A = |
, которое |
||||||||||||||||
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
ω2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
||
называется статическим отклонением. В случае механических колебаний
A = |
|
F0 |
. В случае электромагнитных колебаний |
A |
= |
Um |
. |
||||||
|
mω2 |
|
|||||||||||
0 |
|
|
|
|
|
|
|
|
0 |
|
Lω2 |
||
|
0 |
ω→∞, амплитуда стремится к нулю. |
|
|
|
0 |
|
||||||
|
При |
|
|
|
|
|
|||||||
|
В случае малого затухания, когда δ2 ω2 , резонансная амплитуда |
||||||||||||
|
|
|
|
|
|
x0 |
= ω0 |
x0 |
0 |
|
|
|
|
|
|
|
A |
рез |
= |
=Q A |
, |
|
|
|
|||
|
|
|
2δω |
|
|
|
|
||||||
|
|
|
|
|
2δ ω2 |
0 |
|
|
|
|
|||
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
где Q – добротность колебательной системы, A0 – статическое отклонение. Таким образом, добротность характеризует резонансные свойства
колебательной системы – чем больше Q , тем больше Aрез.
29. Переменный ток.
Переменным током называются вынужденные колебания тока в цепи, совпадающие с частотой вынуждающей ЭДС.
Пусть переменная ЭДС (или переменное напряжение) имеет вид
U =Um cos ωt ,
где Um – амплитуда напряжения. |
сопротивление R , емкость C и |
|||||||
Тогда на участке цепи, имеющей |
||||||||
индуктивность L , закон Ома будет иметь вид |
|
|
|
|||||
q + R q + |
1 |
q = |
Um |
cos ωt или |
L d I |
+ IR + |
q |
=Um cos ωt . |
LC |
|
C |
||||||
L |
|
L |
d t |
|
|
|||
5–17
Рассмотрим частные случаи цепи.
(1) R ≠ 0, C →0, L →0 : переменное напряжение приложено к сопротивлению R . Закон Ома
I = U = Um cos ωt = Im cos ωt .
R R
Амплитуда силы тока Im = URm .
|
|
Колебания тока происходят в одной фазе с |
||||||||||
|
напряжением. |
|
|
|
|
|
|
|
|
|
||
|
|
Для наглядности воспользуемся методом векторных |
||||||||||
|
диаграмм и будем изображать векторами, угол между |
|||||||||||
которыми равен разности фаз. |
|
|
|
|
|
|
|
|
|
|||
(2) R →0, |
C →0, |
L ≠ 0 : переменное |
напряжение приложено |
|
к катушке |
|||||||
индуктивности. |
|
|
|
|
= −L d I . |
|
|
|
||||
ЭДС самоиндукции в катушке |
Θs |
|
|
|
||||||||
Закон Ома L d I |
|
|
|
|
|
|
|
d t |
|
|
|
|
=UL =Um cos ωt , откуда после интегрирования получим |
||||||||||||
|
d t |
|
|
|
U |
|
|
|
|
π |
|
|
|
|
|
|
|
m |
|
|
|
|
|||
|
|
|
I = |
|
sin ωt = Im cos ωt − |
, |
|
|
||||
|
|
|
|
|
|
|
|
|||||
|
|
где Im = Um . |
ωL |
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
ωL |
|
|
|
|
|
|
|
|
|
|
|
Таким образом, падение напряжения U L опережает |
||||||||||
|
по фазе ток I , текущий через катушку, на |
π. |
||||||||||
|
|
Величина |
|
|
|
|
|
RL = ωL |
|
2 |
||
|
|
|
|
|
|
|
|
|
|
|||
называется реактивным индуктивным сопротивлением. Для посто- |
||||||||||||
янного тока (ω= 0) катушка индуктивности не имеет сопротивления. |
||||||||||||
(3) R →0, |
C ≠ 0, |
L →0 : переменное напряжение приложено к конденса- |
||||||||||
тору. |
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
=UC =Um cos ωt . |
|
|
|
||
|
Сила тока |
|
|
|
|
C |
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
|
d q |
|
|
|
|
|
|
|
π |
|
||
|
|
I = |
|
|
|
|
|
|
ωt + |
|
||
|
|
d t |
= −ωCUm sin ωt = Im cos |
2 |
, |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
где Im = ωCUm = 1Um .
ωC
Таким образом, падение напряжения UC отстает по фазе от текущего через конденсатор тока I на π2 .
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |
5–18
Величина
RC = ω1
C
называется реактивным емкостным сопротивлением. Для постоянного тока (ω= 0) RC = ∞, т.е. постоянный ток через конденсатор течь не может.
(4) |
В общем случае R ≠ 0, |
C ≠ 0, |
L ≠ 0 . Если |
|
напряжение |
в |
|
цепи |
|||||||||||||||||||||
|
изменяется по закону U =Um cos ωt , то в цепи течет ток |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
I = Im cos(ωt −ϕ) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
где Im и ϕ определяются формулами |
|
|
|
|
|
|
Um |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Im = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
R |
|
+ ωL |
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωC |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ωL − |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
tg ϕ = |
ωC |
. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
Величина |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Z = |
R |
|
+ ωL − |
|
|
|
|
|
|
|
= |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
ωC |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
= |
|
R2 + |
(R − R |
|
)2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
называется |
полным |
|
|
сопротивле- |
||||||||||||||||||||
|
|
|
|
|
нием цепи. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
Величина |
X = R − R |
|
= ωL − |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
C |
|
|
|
|
|
|
|
|
ωC |
||||
|
называется реактивным сопротивлением. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Таким образом, Im = |
Um |
, tg ϕ= |
X |
, |
причем |
|
cos ϕ= |
|
R |
, sin ϕ = |
X |
. |
||||||||||||||||
|
|
|
|
|
Z |
|
|||||||||||||||||||||||
|
|
Z |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|||||||
30. Резонанс напряжений.
Если ωL = ω1C , то ϕ = 0 – изменения тока и напряжения происходят
синфазно. В этом случае Z = R и ток определяется только активным сопротивлением и достигает максимально возможного значения. Падение
напряжения на конденсаторе UC и на катушке индуктивности U L одинаковы по
амплитуде и противоположны по фазе. Это явление называется резонансом напряжений (последовательным резонансом).
Частота
ωрез = LC1
называется резонансной.
5–19
31.Резонанс токов.
Кцепи переменного тока, содержащей параллельно включенные конденсатор емкостью C и катушку индуктивностью L , приложено напряжение
U =Um cos ωt .
Токи в ветвях 1С2 (R = 0, L = 0) и 1L2 (R = 0, C = ∞) равны
|
|
|
I |
m1 |
= |
|
Um |
, |
|
|
I |
m2 |
= |
Um |
|
|
|
|||||
|
|
|
|
ωL |
||||||||||||||||||
|
|
|
|
1 |
ωC |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
и противоположны по фазам. Амплитуда силы тока |
||||||||||||||||||||
|
|
во внешней (неразветвленной) цепи |
|
|
1 |
|
|
|||||||||||||||
|
|
|
Im = |
|
Im1 − Im2 |
|
=Um |
|
ωC − |
|
. |
|||||||||||
|
|
|
|
|||||||||||||||||||
|
1 |
|
|
ωL |
||||||||||||||||||
Если ω= ωрез = |
|
, то Im1 = Im2 |
|
|
|
Im = 0 . |
|
|
|
|
|
|
||||||||||
|
и |
|
|
|
Явление резкого |
|||||||||||||||||
|
|
|
|
|
||||||||||||||||||
|
LC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
уменьшения амплитуды силы тока во внешней цепи, питающей параллельно включенные конденсатор и катушку индуктивности, при приближении частоты
ωприложенного напряжения к резонансной частоте ωрез называется
резонансом токов (параллельным резонансом).
В реальных цепях R ≠ 0 , поэтому сила тока Im > 0 , но принимает наименьшее возможное значение.
32. Действующее значение переменного тока.
Действующим или эффективным значением переменного тока
I = I0 cos ωt называется среднее квадратичное значение силы тока за период T его изменения
Iэф = |
1 |
T |
I 2 (t)d t = |
I0 |
, |
поскольку cos2 ωt = |
1 . |
|
T |
∫ |
2 |
||||||
|
|
|
|
2 |
||||
|
|
0 |
|
|
|
|
|
Аналогично, действующее значение напряжения: Uэф = U20 .
33. Мощность, выделяемая в цепи переменного тока.
Мгновенная мощность тока в цепи
P(t) =U (t)I(t) =Um cos ωt Im cos(ωt −ϕ) .
Среднее за период значение мгновенной мощности называется активной мощностью P тока
|
1 T |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
P = |
|
∫0 Um cos ωt Im cos(ωt −ϕ) d t = |
2 ImUm cos ϕ = IэфUэф cos ϕ. |
|
||||||||||||
T |
|
|||||||||||||||
Множитель cos ϕ называется коэффициентом мощности. |
|
|
||||||||||||||
|
|
|
Uэф |
|
R |
|
|
|
|
R |
|
|
|
|
RUэф2 |
2 |
Так как Iэф |
= |
|
, и cos ϕ = |
|
= |
|
|
|
|
|
|
|
, то P = |
|
= RIэф . |
|
Z |
Z |
|
2 |
|
|
1 |
|
2 |
Z 2 |
|||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
R |
|
+ ωL − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
ωC |
|
|
|
|
|
А.Н.Огурцов. Физика для студентов |
|
Колебания и волны |