

Вишняков. МЭР в расчете
.DOCВишняков А. И.
МЕТОДЫ ЭВОЛЬВЕНТНЫХ РАЗНОСТЕЙ В РАСЧЕТЕ СТРОИТЕЛЬНЫХ
КОНСТРУКЦИЙ
Эвольвента (развертка исходной кривой — эволюты) является траекторией конца нити, намотанной на эволюту (рис. 1). В связи с этим радиусы эвольвенты имеют центры на эволюте, касательные к ней и нормальные к эвольвенте.
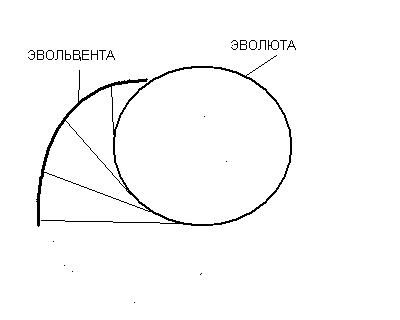
Рис.1. Эвольвента
В основу методов эвольвентных разностей лри проектировании дорожных трасс положено допущение о том, что сдвиг (E) проекта относительно базиса определяется разностью эвольвент плоских линий (рис. 2):
E = E2 – E1.
По величине разность эвольвент (сдвиг) приближается к нормали (отрезку между базисом и проектом, нормальным к базису): N ≈ E.
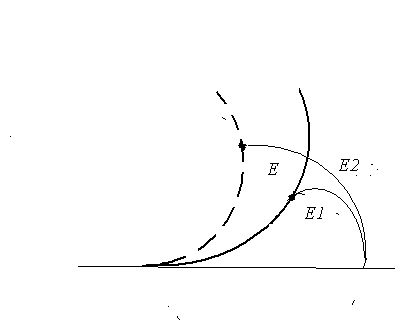
Рис.2. Эвольвентная разность
Наглядное представление о существе методов эвольвентных разностей можно составить из рассмотрения элемента базис-проекта (рис. 3) и диаграммы углов того же элемента (рис. 4).

Рис. 3. Элемент базис-проекта
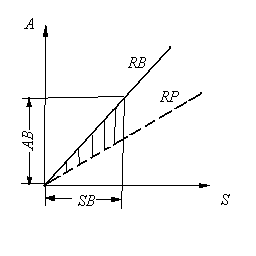
Рис. 4. Диаграмма углов элемента
Элемент базис-проекта представлен дугами базисной круговой кривой с радиусом RB и проектной круговой кривой с радиусом RP (с центрами окружностей, лежащими на горизонтальной прямой). В начальной точке кривых, лежащей на горизонтальной прямой, касательные кривых – параллельны (вертикальны) и нормаль имеет нулевое значение. При заданной длине базиса SB (центральный угол AB) имеем некоторую нормаль N.
На диаграмме углов (с горизонтальной осью длин S и вертикальной осью углов A) круговые кривые трансформируются в наклонные прямые. Для базиса эта трансформация однозначно определена (RB*AB=SB). Для проекта (при заданном радиусе RP) функциональная зависимость длины от угла – приближенная.
Легко доказать, что диаграмма углов имеет следующее свойство: разность эвольвент численно равна площади углограммы (площадь, соответствующая нормали N, т. е. сдвиг, заштрихована).
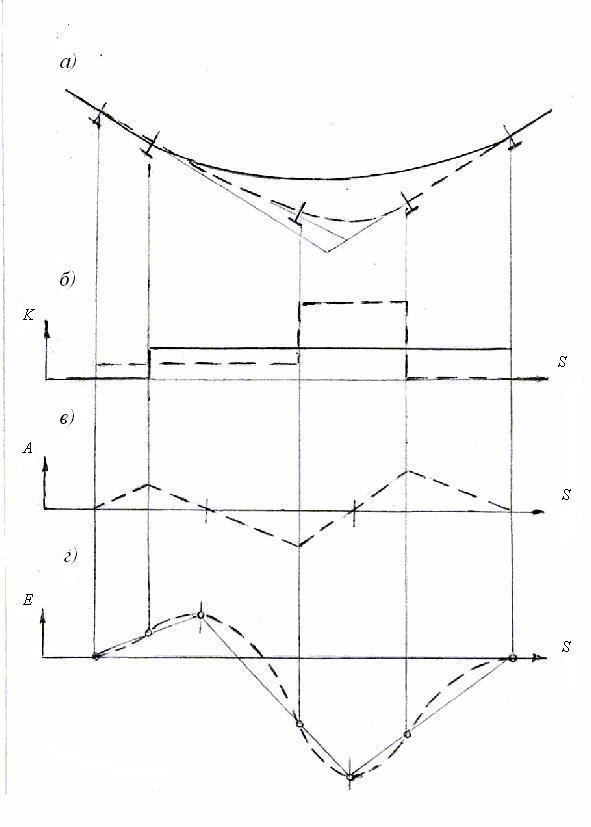
Рис. 5. Диаграммы: а – базис-проекта, б – кривизны, в – разности углов, г – сдвигов
При решении тех или иных задач о взаимном положении проекта и базиса приходится опираться на свойства трех взаимосвязанных диаграмм.
На рис. 5 для конкретного примера (базис представлен тремя элементами и проект – четырьмя) показаны три диаграммы. На диаграмме кривизны элементы постоянной кривизны (круговые кривые, прямые) представлены горизонтальными линиями с ординатами K = 1/R (кривизна обратно пропорциональна радиусу).
На диаграмме углов (точнее, диаграмме разности углов) элементы представлены интегральной функцией от кривизны ( A = ∫ K dS ). При этом горизонтальные линии кривизны трансформируются в наклонные прямые (базис совмещен с горизонтальной линией).
Диаграмма сдвигов является интегральной формой от диаграммы углов ( E = ∫ A dS = ∫∫ K dS ). Элементы на ней представлены параболами второй степени с вертикальными осями.
Отклонение (невязка) нормали от разности эвольвент определяется удаленностью проекта по отношению к базису. В ряде практических задач (выправка пути, прочностные расчеты) при незначительных сдвигах невязками пренебрегают. При значительном удалении проекта от базиса (объекты строительства и машиностроения) требуются трудоемкие и индивидуальные уточняющие расчеты (обычно тригонометрические). Область же применения методов эвольвентных разностей может быть значительно расширена анализом невязок и уточнением сдвигов.
Применение методов эвольвентных разностей в расчете конструкций представлено на рис.6 диаграммами консоли, загруженной моментом
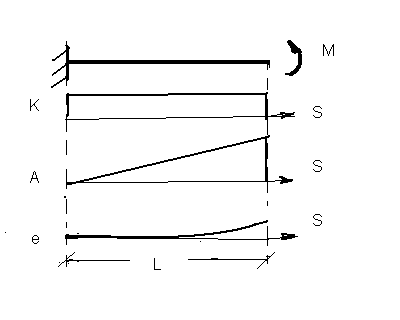
Рис. 6. Диаграммы кривизны, углов и прогибов консоли
Кривизна здесь является постоянной величиной, равной моменту, деленному на изгибную жесткость (K=M/(E*I)). Угол поворота оси на конце консоли A= M*L/(E*I), а прогиб консоли e=M*L*L/(2*E*I). При исходной изогнутой оси консоли прогиб равен разности эвольвент. В нашем же случае исходная ось консоли является прямой (круговой кривой с радиусом R, равным бесконечности, и кривизной K=0). В этом случае прогиб равен длине эвольвенты.
В сложных случаях (переменных изгибных жесткостей, переменных моментов, изогнутой исходной оси ) могут быть применены приемы проектирования дорожных трасс методами эвольвентных разностей по схеме базис-проект (см . рис 5).