

7.7. Оценка передаточного числа по нагреву и целесообразности применения редуктора
П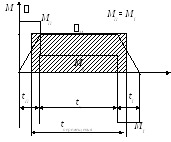 ри
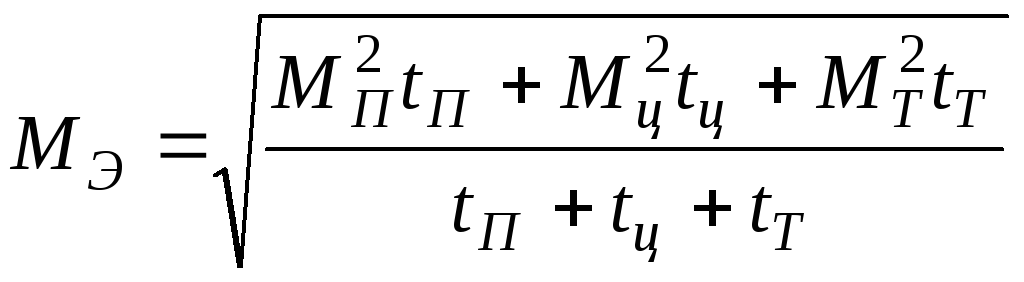
трапецеидальном графике скорости
среднеквадратический момент двигателя
определяется выражением
ри
трапецеидальном графике скорости
среднеквадратический момент двигателя
определяется выражением
 ,
,
МэМном.
Подставляя в (1) значения моментов и времени, получаем
 ,
,
где МП=МТ=Мном,![]() - момент механизма,
- момент механизма,![]() ,
,![]() ,=Мtперем– угловое перемещение, определяемое
заштрихованной площадью. Оптимальноеjопределяется из
условия
,=Мtперем– угловое перемещение, определяемое
заштрихованной площадью. Оптимальноеjопределяется из
условия![]() :
:

Расчеты по библиотечной программе вычисления корней (отрицательные и комплексные корни исключаются).
Оценка целесообразности применения редуктора производится по величине электромеханической постоянной времени ЭМС:
Д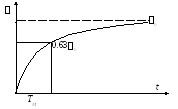 ля
любого типа двигателя
ля
любого типа двигателя
![]() ,
,
где 0– скорость идеального холостого хода,Мдп– пусковой момент.
В безредукторном варианте привода
![]() ,
,
где ТЭМС– электромеханическая постоянная времени ЭМС,0М– определяет х.х. механизма.
Если требуемое значение ТЭМСудовлетворяется, то может иметь место безредукторный вариант. Однако в этом случае необходимо сделать оценку на минимум массы и стоимость привода.
В варианте ЭМС с редуктором
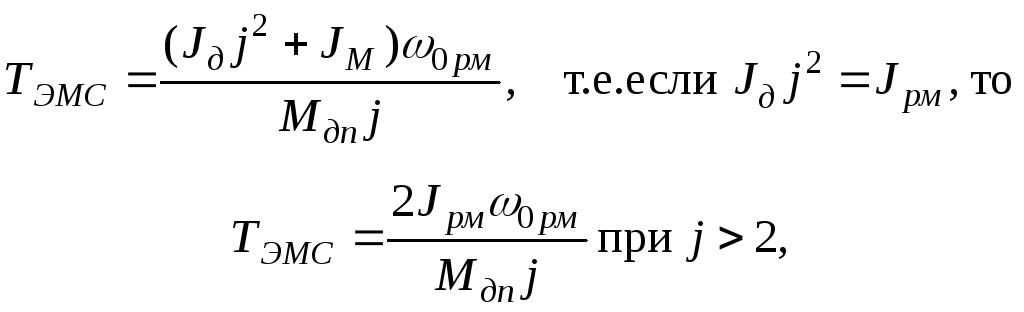
откуда ТЭМСуменьшается при возрастанииj, т.к.Jрм>>Jди, если в безредукторном варианте требуемое значение ТЭМС не удовлетворяется, то последовательно определяютjпоТЭМС, а затем проверяют по другим критериям.
7.8. Учет потерь в механической части ЭМС
Общие потери механической части ЭМС состоят из потерь в двигателе и потерь в редукторе. Как известно, в любом двигателе можно определить электромагнитную мощность, т.е. мощность, созданную в воздушном зазоре, если от Рпотрили Р1вычесть потериР, компенсируемые сетью
РЭМ=Р1Р.
Электромагнитная мощность преобразуется в механическую мощность, в том числе Рмех, т.е.
РЭМ=Р2+Рмех.
Потери в общем случае могут быть представлены:
Рмех= Рмех=+Рмех~
постоянной и переменной частями. Ясно, что справедливо выражение
![]() или
или
МЭМ=Мрм+Мод+Мпд.
Почти всегда Мпд К2, а при малых отношениях скоростиМпд,- коэффициент внешнего вязкого трения.
В ПУ также потери разделяют на постоянные, не зависящие от полезной нагрузки, и переменные, зависящие от передаваемой нагрузки. В справочниках приведены зависимости КПД одноступенчатых зубчатых передач. Тогда приведенный статический момент определяют
![]() ,
,
jпу=j1jk– передаточные отношения отдельных ступеней,
пу=1k– КПД.
7.9. Современные способы регулирования частоты вращения
Регулирование двигателей (ДПТ, ВД) в настоящее время осуществляется в основном посредством изменения напряжения.
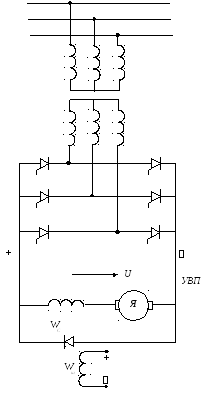
При этом для изменения Uиспользуют полупроводниковые преобразователи, т.е. УВ-ДПТ. Для нереверсивных ЭМС применяются трехфазные схемы
U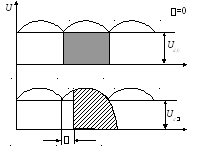 cp=Ud,0cos
- режим непрерывных токов,
cp=Ud,0cos
- режим непрерывных токов,
![]() .
.
Режимы с прерывистым током осуществляются звеньями:
Звено «ШИП-Д» или «ЧИП-Д»:
U ср=U,
ср=U,
![]() - скважность.
- скважность.
Пример нереверсивной схемы «ШИП-ДПТ» или «ЧИП-ДПТ», возможна комбинация «ШИП-ЧИП-ДПТ»:
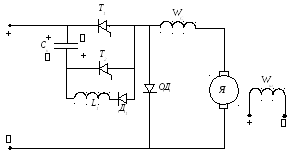
ОД– обратный диод. Заряд конденсатораСк при включенииТ2по цепи «+»Ск – Т2–Wc – Я– «». После включенияТ1конденсаторСкперезаряжается по цепиСк – Т1–Д1 – L1 - Ски приобретает полярность, требуемую для запирания тиристораТ1.

Различают
режимы непрерывного и прерывистого
тока. Эти режимы определяют значения
коэффициента формы тока
![]() .
В режиме прерывистого токаКфможет достигать значенияКф34.
.
В режиме прерывистого токаКфможет достигать значенияКф34.