6. Доказать формулу .
1)
Найдем
модуль вектора кривизны.
Для этого рассмотрим треугольник
образующийся векторами

 .
Угол между векторами
.
Угол между векторами
 наз. углом смежности.
наз. углом смежности.
<(
Треугольник РАВ явл. равнобедренным (РА=РВ=1)

(sinx )
)
 .
.
2)
Используя формулу
 можно показать, что кривизна окружности
радиусаR
равна
можно показать, что кривизна окружности
радиусаR
равна
 .
.
СМ.
РИС. В КОНСПЕКТЕ
Касательная общая и
для кривой и для окружности. Можно
построить бесконечно много окружностей,
которые проходят через две бесконечно
близкие точки кривой. Существует только
одна окружность проходящая через 3
бесконечно близкие точки. Кривизна
точки Р равна кривизне соприкосающ.
окружности. Центр окружности наз.
центром кривизны,
а радиус окружности- радиусом
кривизны.
обознач. радиус кривизны греческой
буквой
 .
.
 ,
где
,
где
 -радиус
кривизны.
-радиус
кривизны.
3)Плоскость РАВ находится и образованна касательной точкой достаточно близкой к точке Р, поэтому предельное положение этой плоскости- есть соприкасающиеся плоскости. Вектор средней кривизны находится в плоскости АВР, а предельное положение вектора средней кривизны есть вектор кривизны К. Следовательно вектор кривизны лежит в соприкасающейся плоскости.
Рассмотрим
 =90
=90 =
= 90
90 (при
(при ).
).
 =
90
=
90 ,
, .
.
Т.к. и
и лежит в соприкас.плосости, то вектор
кривизны направлен вдоль главной
нормали, а ед.вектор главной нормали
обозн.
лежит в соприкас.плосости, то вектор
кривизны направлен вдоль главной
нормали, а ед.вектор главной нормали
обозн. .
Т.к. модуль вектора =
.
Т.к. модуль вектора = ,
то
,
то .
Следовательно
.
Следовательно .
.
7. Естественный способ задания движения точки.
1)Для того чтобы задать движение точки естеств. способом, необходимо: а)задать траекторию ее движения относит. выбранной с-мы координат; б) на траектории следует выбрать начало отсчета и задать направление движения; в)задать закон движения точки вдоль траектории в виде s=s(t), где s-расстояние от точки до начала отсчета на траектории, измеренное вдоль траектории, при этом ф-ция s(t) должна быть однозначной, непрерывной и дифференцируемой.
2)Скоростью
точки
в данный момент времени наз. предел
средней скорости точки при ∆t→0,
т.е.

Вывод
формулы:
 т.к.
т.к.

1) ↑↑
↑↑ →касат., провед. в точкеP
→касат., провед. в точкеP
2)
|∆r|≈∆s
…= =>
=>
3)
Отношение
∆V/∆t
наз. средним
ускорением
точки за промежуток времени ∆t.
Ускорение
точки:
Вывод
формулы:
мы знаем, что
 ,
где
,
где -
- -нормальное
ускорение,
-нормальное
ускорение, -
- - касательное ускорение
- касательное ускорение
 -
полное ускорение
-
полное ускорение
8. Задание движения точки в полярных координатах.
1)Зададим
систему отсчета и расстояние от начала
с-мы до точки r=r(t),
𝞿=𝞿(t),
 .
.
 направлен
в сторону увеличения угла 𝞿.
Выразим вектора
направлен
в сторону увеличения угла 𝞿.
Выразим вектора
 и
и черезi
и j.
черезi
и j.
2)Выводим ф-лу для нахож-я скорости в пол-х к-х:
Продифференцируем эти равенства по времени

3)Найдем
ускорение:

9. Матрица ориентаций. Связь между координатами вектора в различных системах отсчета
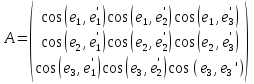
1)Матрицей
ориентации наз-ся
матрица А сост-ую из элем-ов
 ,
где
,
где определяеся ф-ой:
определяеся ф-ой:
2)
Расм. вект. Р с началом в точке О, пусть
его разложение по ортам не штрихованной
системы координат имеет вид:
 =
= (1) Разл по штрихованым ортам системы
корд им вид:
(1) Разл по штрихованым ортам системы
корд им вид:
 =
= (2) Сравнивая (1) и (2) получаем что:
(2) Сравнивая (1) и (2) получаем что: (3) .Умножив обе части равенства на вектор
(3) .Умножив обе части равенства на вектор получим
получим ;
; ,
т.к
,
т.к и
и


Затем проделам туже операцию для е2 и е3 получим систему



3) Запишем эту систему в матричной форме:
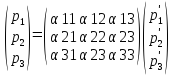 Р=А
Р=А (4)
(4)
Умножив
равенство (3) на


 Используя
(5) тогда (4) привет вид Р=(А
Используя
(5) тогда (4) привет вид Р=(А , А
, А , условие (6) явл. Не обходимым условием
того что бы матрицы А могла бытьматрицей
ориентаций.
, условие (6) явл. Не обходимым условием
того что бы матрицы А могла бытьматрицей
ориентаций.
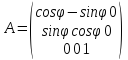
4)Матрица
ориентаций в случае поворота ??? начинается
с