28. Передаточное отношение. Вывод формул для определения предаточных отношений в многозвенных механизмах.
Передаточное отношение – отношение угловой скорости звена принятого за ведущее к угловой скорости звена принятого за ведомое.
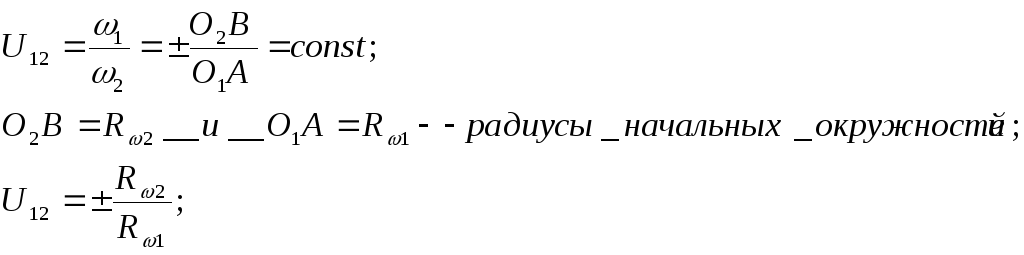
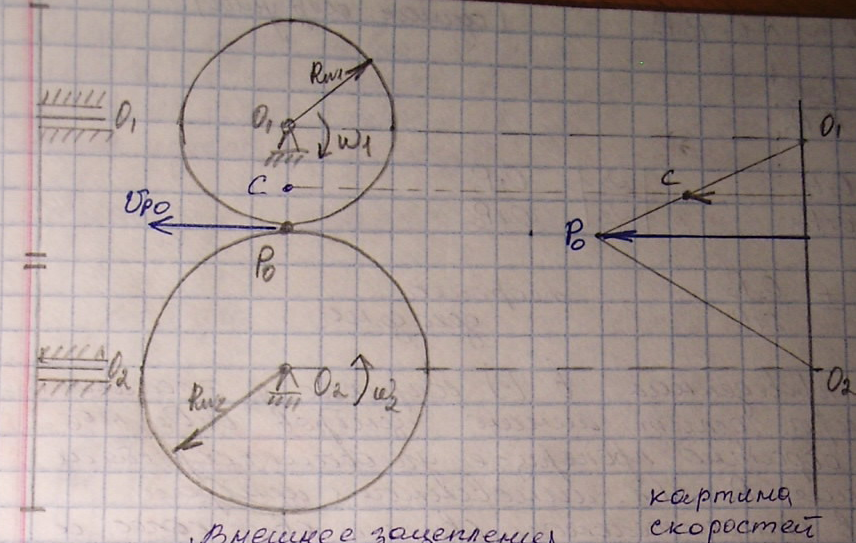
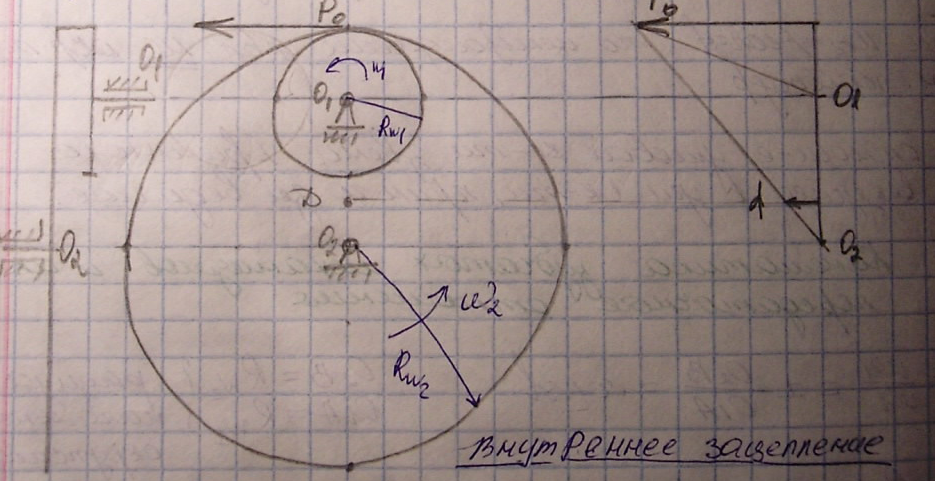
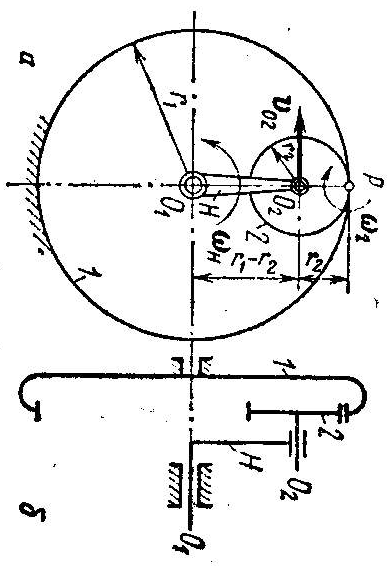
Рисунок из лекции 10
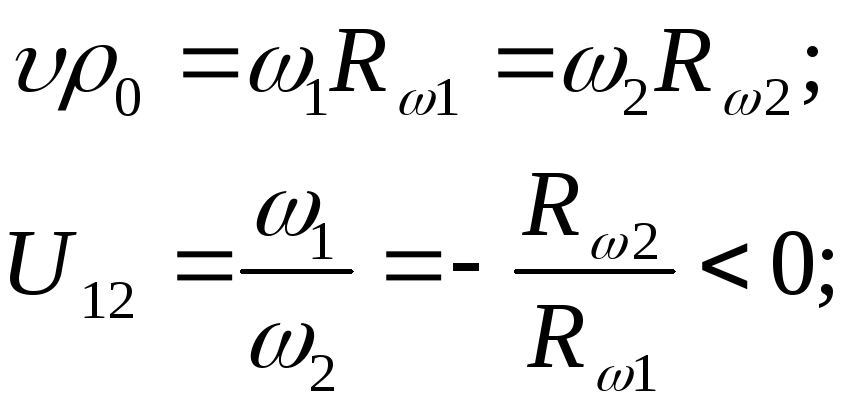
Для внешнего зацепления передаточные отношения отрицательны.


 q
– число внешних зацеплений.
q
– число внешних зацеплений.
Передаточное отношение может быть определено ч/з число зубьев колес.
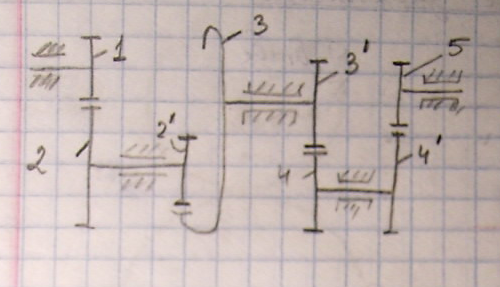
Определение передаточных отношений в многозвенных механизмах.
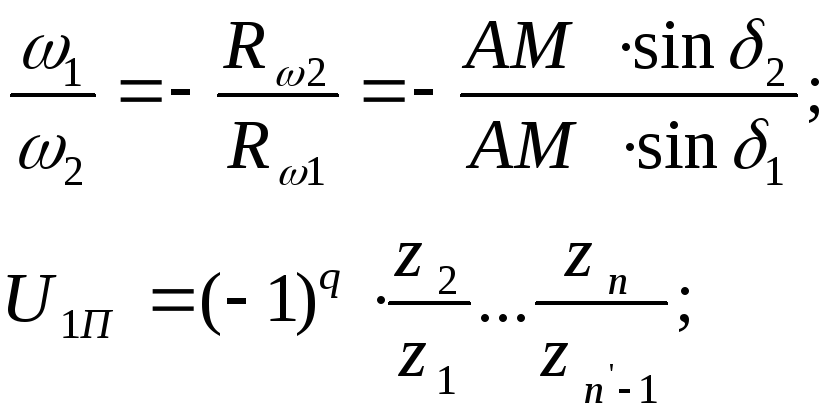
По определению

Для того, чтобы определить передаточное отношение в многозв. механизмах, необходимо получить фор-лу по которым оно определяется.
![]() те
передаточное отношение многозвенной
передачи = произведению передаточных
отношений каждого зацепления в этой
передаче.
те
передаточное отношение многозвенной
передачи = произведению передаточных
отношений каждого зацепления в этой
передаче.
![]() ,
где q-
число внешних зацеплений.
,
где q-
число внешних зацеплений.
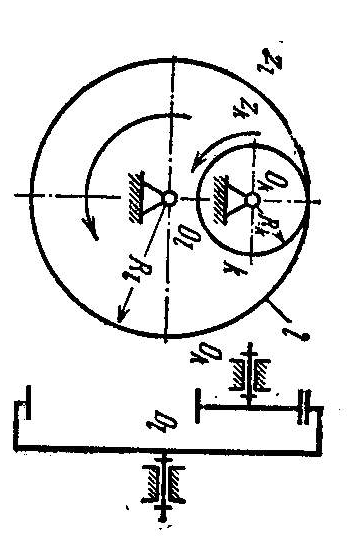
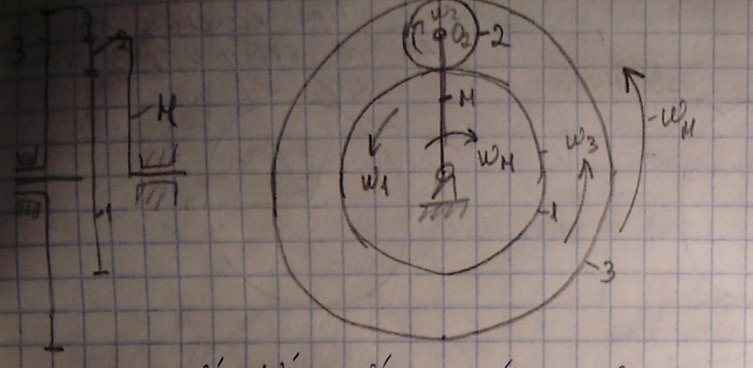
29. Дифференциальные и планетарные мех-мы.
Механизмы имеющие подвижные оси используются для того, чтобы при небольших габаритах получать большие передаточные отношения или решать определенные математические задачи. Среди этих мех-овимеются диф-ый и планетарные механизмы.
Если степень подвижности = 2 и более –дифференциальные механизмы => 2 и более ведущих звеньев .
1 ведущее звено – планетарные мех-мы.
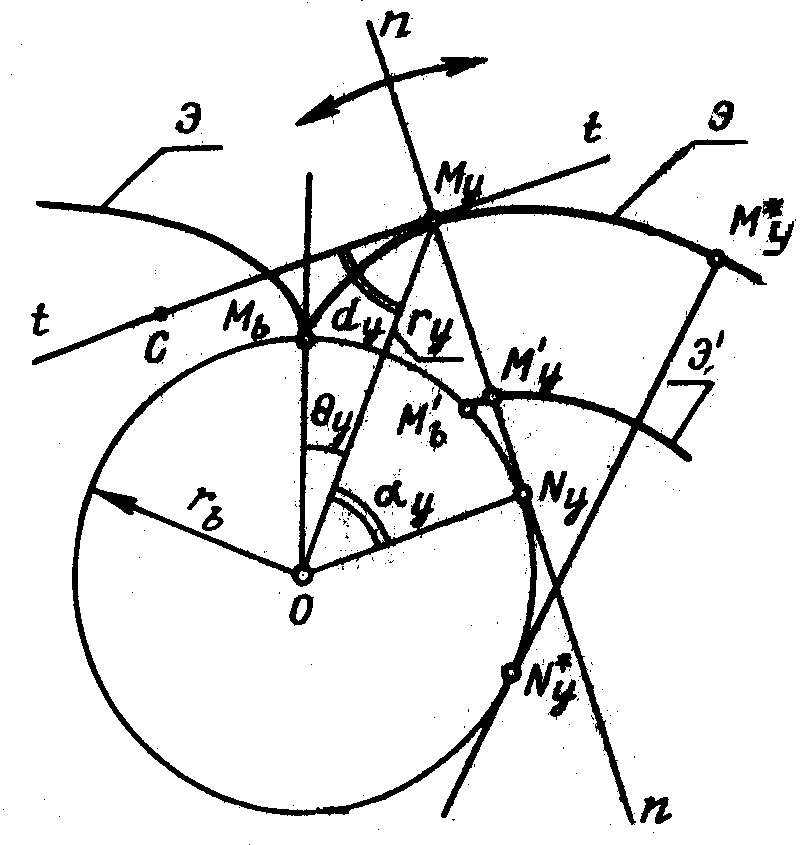
30.Эвольвента и её свойства. Вывод уравнения эвольвенты.
Геометрическое
место центров кривизны к-л кривой наз-ся
эволютой, а сама кривая по отношению к
эволюте наз-ся разверткой или эвольвентой.
Проведем окружность радиусом
![]() называемую основной, далее проведем к
ней касательно производящую прямуюnn
и покатим её по окружности без скольжения
сначала по часовой стрелке, а затем
против. Любая точка прямой, например,
точка M
называемую основной, далее проведем к
ней касательно производящую прямуюnn
и покатим её по окружности без скольжения
сначала по часовой стрелке, а затем
против. Любая точка прямой, например,
точка M![]() опишет при этом кривую Э, называемую
эвольвентой. Как видно из рисунка
эвольвента имеет две симметричные ветви
и точку возврата
опишет при этом кривую Э, называемую
эвольвентой. Как видно из рисунка
эвольвента имеет две симметричные ветви
и точку возврата
![]() ,
находящуюся на основной окружности.
,
находящуюся на основной окружности.
Свойства эвольвенты:
1.Нормаль к эвольвенте есть производящая
прямая nn,
т.е. нормаль к эвольвенте касательна к
основной окружности. 2.При увеличении
радиуса
![]() основной окружности эвольвента постепенно
теряет свою кривизну; в пределе при
основной окружности эвольвента постепенно
теряет свою кривизну; в пределе при![]() →
→![]() эвольвента превращается в прямую линию.
3.Радиус кривизны
эвольвента превращается в прямую линию.
3.Радиус кривизны![]() эвольвенты в текущей точкеM
эвольвенты в текущей точкеM![]() равен отрезку
равен отрезку
![]()
![]() .
Отсюда следует, что в точке
.
Отсюда следует, что в точке![]() ,
более удаленной от точки
,
более удаленной от точки![]() ,
чем тока
,
чем тока![]() ,
радиус кривизны
,
радиус кривизны![]() =
=![]() больше, чем радиус кривизны
больше, чем радиус кривизны![]() =
=![]() .
.
Укажем полярные
координаты точки
![]() :
полярный угол
:
полярный угол![]() и полярный радиус-вектор
и полярный радиус-вектор![]() (отрезок
(отрезок![]() ),
и профильный угол
),
и профильный угол![]() С,
обозначаемый
С,
обозначаемый![]() .
Составим уравнение эвольвенты, т.е.
установим аналитическую связь между
координатами
.
Составим уравнение эвольвенты, т.е.
установим аналитическую связь между
координатами![]() ,
,![]() ,
,![]() .
.
Т.к. прямая nn
катится по основной окружности без
скольжения, то отрезок
![]()
![]() равен дуге
равен дуге![]() :
:![]() =
=![]() .
Из первого свойства эвольвенты следует,
что угол
.
Из первого свойства эвольвенты следует,
что угол![]() равен углу
равен углу![]() =
=![]() .
Поэтому
.
Поэтому![]() =
=![]() ,
а
,
а![]() =
=![]() (
(![]() +
+![]() ).
Получим
).
Получим![]() =
=![]() +
+![]() ,
откуда :
,
откуда :![]() =
=![]() -
-![]() (1). Из ∆
(1). Из ∆![]() имеем:
имеем:![]() =
=![]() /
/![]() (2). Исключив из системы уравнений (1)-(2)
(2). Исключив из системы уравнений (1)-(2)
![]() ,
получим связь между
,
получим связь между![]() и
и![]() .
Т.о., система уравнений (1)-(2) – уравнение
эвольвенты в параметрической форме.
Из уравнения (1) видно, что
.
Т.о., система уравнений (1)-(2) – уравнение
эвольвенты в параметрической форме.
Из уравнения (1) видно, что![]() =ƒ(
=ƒ(![]() ).
Эта зависимость наз-ся эвольвентной и
записывается:
).
Эта зависимость наз-ся эвольвентной и
записывается:![]() =
=![]()
![]() .
.
Если взять на
производящей прямой nn
другую точку, например,
![]() и покатить прямуюnn
по основной окружности без скольжения,
то точка
и покатить прямуюnn
по основной окружности без скольжения,
то точка
![]() опишет эвольвенту
опишет эвольвенту![]() ,
такую же, как и эвольвента Э, но сдвинутую
относительно неё и
,
такую же, как и эвольвента Э, но сдвинутую
относительно неё и![]() =
=![]() .
.