


ωn = υ2
R
Подставляя в это выражение υ из (10.9), находим, что
ωn = ω2R
Модуль тангенциального ускорения в соответствии с (9.8) равен
опять уравнением (10.9), получаем:
lim |
Δυ |
|
= |
|
lim |
(ωR) |
|
= |
|
lim R |
Δω |
|
= R |
|
lim |
Δω |
|
|
|
|
|
|
|||||||||||
t→0 |
t |
|
|
|
t→0 |
t |
|
|
|
t→0 |
t |
|
|
|
t→0 |
t |
т.е.
ωτ = βR
(10.10) ddtυ . Воспользовавшись
= Rβ,
(10.11)
Таким образом, как нормальное, так и тангенциальное ускорение растет линейно с R — расстоянием точки от оси вращения.
§11. Связь между векторами v и ω
Кроме рассмотренных ранее операций сложения и вычитания векторов, а также умножения вектора на скаляр (см. §2), существуют также операции перемножения векторов. Два вектора можно умножить друг на друга двумя способами: первый способ дает в результате некоторый новый вектор, второй — приводит к скалярной величине. Отметим, что операции деления вектора на вектор не существует.
Сейчас мы рассмотрим секторное произведение векторов. Скалярное произведение векторов мы введем позднее, когда оно нам понадобится.
Векторным произведением двух векторов А и В называется вектор С, обладающий следующими свойствами:
1) модуль вектора С равен произведению модулей перемножаемых векторов на синус угла α между ними (рис 35):
C=ABsinα
2) вектор С перпендикулярен к плоскости, в которой лежат векторы А и В, причем направление его связано с направлениями А и В по правилу правого винта: если смотреть вслед вектору С, го совершаемый по кратчайшему пути поворот от первого сомножителя ко второму осуществляется по часовой стрелке.
Символически векторное произведение можно записать двумя способами: |AB| или A× B .
Мы будем пользоваться первым из этих способов, причем иногда для облегчения чтения формул будем ставить запятую между сомножителями. Не следует применять одновременно косой крест и квадратные скобки: [А× В], Недопустима запись такого вида: [АВ]=ABsinα. Слева здесь стоит вектор, справа — модуль этого вектора, т. е. скаляр. Справедливо следующее равенство:
| [AB]|= ABsin α. |
(11.1) |
Поскольку направление векторного произведения определяется направлением вращения от первого сомножителя ко второму, результат векторного перемножения двух векторов зависит от порядка сомножителей. Изменение порядка сомножителей вызывает изменение направления результирующего вектора на противоположное (рис. 35)
[BA] = − [AB]
или
B× A = −(A × B).
33
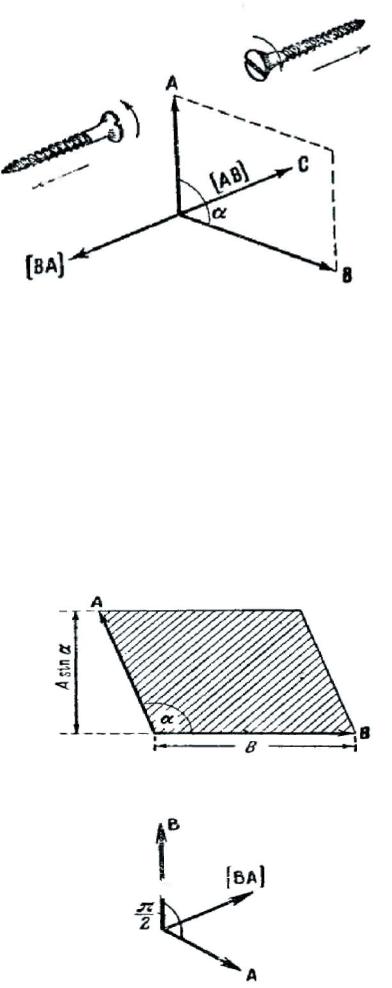
Рис. 35.
Таким образом, векторное произведение не обладает свойством коммутативности. Можно доказать, что векторное произведение дистрибутивно, т. е. что
[A,(B1 + B2 + ...+ BN )] = [AB1 ]+ [AB2 ]+ ...+ [ABN ]. |
(11.2) |
Векторное произведение двух полярных или двух аксиальных векторов есть аксиальный вектор. Векторное произведение аксиального вектора на полярный (или наоборот) будет, однако, вектором полярным. Изменение условия, определяющего направление аксиальных векторов, на обратное приведет в этом случае к изменению знака перед векторным произведением и одновременно к изменению знака перед одним из сомножителей, В итоге величина, выражаемая векторным произведением остается без изменений.
Модулю векторного произведения можно дать простую геометрическую интерпретацию: выражение ABsinα численно равно площади параллелограмма, построенного на векторах А и В (рис. 36; вектор С=[АВ] направлен в этом случае перпендикулярно к плоскости чертежа, за чертеж).
Рис 36.
Пусть векторы А и В взаимно перпендикулярны (рис. 37).
34
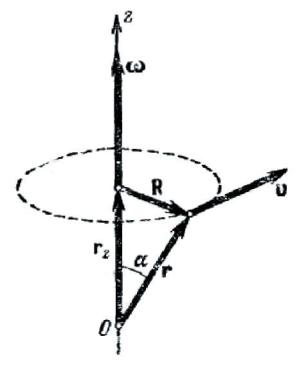
Рис. 37.
Образуем двойное векторное произведение этих векторов:
D= A,[BA] ,
т. е. умножим вектор В на А, а затем умножим вектор А на вектор, получившийся в результате первого умножения. Вектор [ВА] имеет модуль, равный BA(sin α = sin π2
векторами А и B углы, равные π/2. Следовательно, модуль вектора D равен |A|*|[BA]|=A*BA=A2B. Направление же вектора D, как легко видеть из рис. 37, совпадает с направлением вектора В. Это дает нам основание написать следующее равенство:
A, |
BA |
= A2B. |
(11.3) |
|
|
[ |
] |
|
|
Рис. 38.
Формулой (11.3) мы будем в дальнейшем пользоваться неодноктратно. Подчеркнем, что она справедлива только в том случае, когда векторы А и В взаимно перпендикулярны.
Уравнение (10.9) устанавливает связь между модулями векторов v и ω. С помощью векторного произведения может быть написано выражение, дающее cooтношение между самими векторами. Пусть тело вращает вокруг оси z с угловой скоростью ω (рис. 38). Jleгко видеть, что векторное произведение ω на радиус-вектор точки, скорость v которой мы хотим найти, представляет собой вектор, совпадающий по направлению с вектором v и имеющий модуль, равный ωr sinα=ωR, т.е. v [см. формулу (10.9)]. Таким образом, векторное произведение [ωR] и по направлению и по модулю равно вектору v:
v=[ωr] |
(11.4) |
Формуле (11.4) можно придать иной вид. Для этого представим радиус-вектор r в виде суммы двух составляющих — вектора rz, параллельного оси z и вектора, перпендикулярного к оси z: r=rz+R (см. рис. 38). Подставив это выражение в формулу (11.4) и воспользовавшись дистрибутивностью векторного произведения [см. (11.2)], получим:
[ωr] = [ω(rz + R)] = [ωrz ]+ [ωR].
Векторы ω и rz коллинеарны. Поэтому их векторное произведение равно нулю (sinα=0). Следовательно, можно написать, что
v=[ωR] |
(11.5) |
35