

1.4.8 РУПОР
Создайте новый документ 3D детали и сохраните его в файл с именем
Рупор.grb в папку Прибор.
Внешний вид и размеры рупора представлены на рис. 1.7.
 13
13
0.7 |
25w |
|
80 |
|
6.5 |
|
17w |
а) |
б) |
Рис. 1.41 – Рупор: а – внешний вид; б – размеры
Рупор изготовлен из листового металла. Но при создании модели удобнее сначала создать монолитное пирамидальное тело, а уже затем преобразовать его в листовой металл.
Пирамидальное тело создается выталкиванием профиля, полученного на основе построений, выполненных на рабочей плоскости Вид слева, и показанных на рис. 1.42, а. Параметры выталкивания приведены на рис.
1.42, б. Материал рупора – Металлы/ГОСТ/Медь, сплав меди/Медь/М3
ГОСТ 859-2001.
а) |
б) |
Рис. 1.42 – Выталкивание с уклоном: а – построения; б – параметры
Поскольку в операции Выталкивание нельзя задать разный уклон для боковых граней, после получения тела необходимо изменить наклон
41
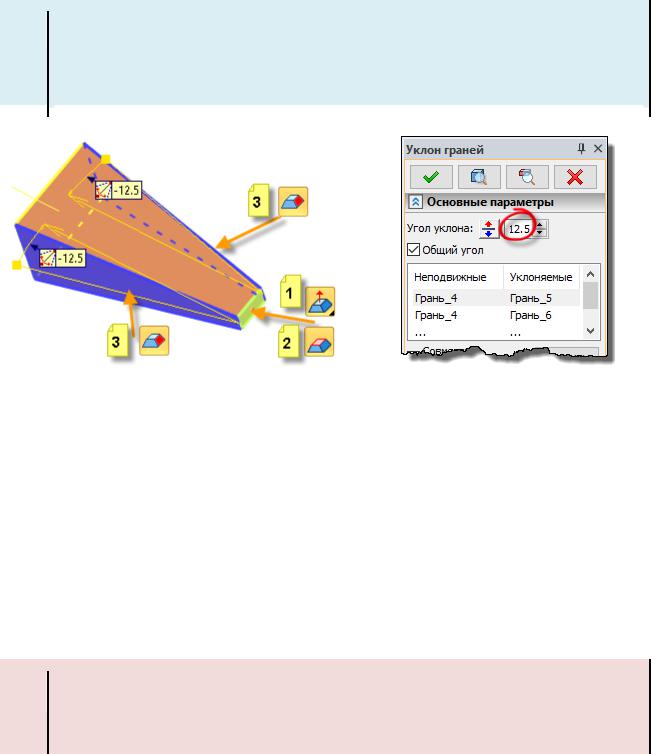
двух граней. Для этого используется команда ГМ: 3D Мо-
дель/Расширенные/Уклон  ▼ Уклон граней. После вызова команды выполняется следующая последовательность действий (рис. 1.43, а):
▼ Уклон граней. После вызова команды выполняется следующая последовательность действий (рис. 1.43, а):
1)Выбор направления уклона. При выборе грани нормаль к ней будет использована для отсчета углов.
2)Выбор неподвижной грани.
3)Выбор уклоняемых граней.
4)Задание угла уклона (рис. 1.43, б).
5)Подтверждение выполнения команды.
На рис.1.43, а показаны иконки Автоменю, отвечающие за выполнение соответствующих действий. В ходе выполнения последовательности действий переключение опций происходит автоматически.
|
|
а) |
б) |
Рис. 1.43 – Изменение наклона граней: а – порядок действий; б – параметры
Чтобы из монолитного тела получить листовой металл, надо восполь-
зоваться командой ГМ: 3D Модель/Специальные/Листовой металл ▼  Преобразование тела в лист.
Преобразование тела в лист.
После вызова команды выполняется следующая последовательность действий (рис. 1.44, а):
1)Выбор неподвижной грани.
2)Выбор ребер для сгиба.
3)Настройка параметров (рис. 1.44, б).
4)Подтверждение выполнения команды.
При выполнении команды кнопка Автоменю  (Гибка результата) должна быть отключена (не иметь подсветки). Это необходимо, потому что развернутое тело потребуется
(Гибка результата) должна быть отключена (не иметь подсветки). Это необходимо, потому что развернутое тело потребуется
42
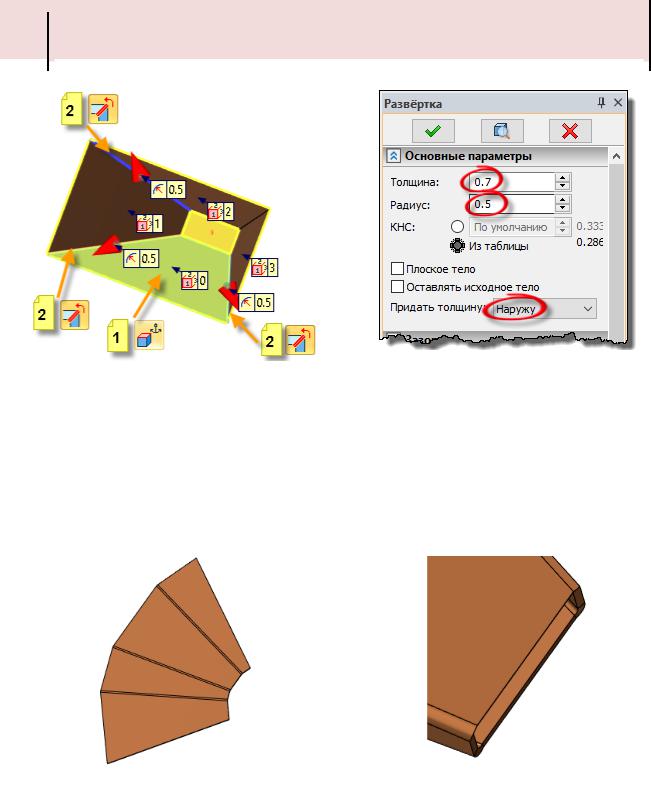
для нанесения изображения развертки при создании чертежа детали.
|
|
а) |
б) |
Рис. 1.44 – Преобразование в листовой металл: а – порядок действий; б – параметры
Результат предыдущей операции показан на рис. 1.45, а. Команда
ГМ: 3D Модель/Специальные/Листовой металл ▼  Повторная гибка произведет сгибание развертки.
Повторная гибка произведет сгибание развертки.
а) |
б) |
Рис. 1.45 – Развертка рупора и повторная гибка: а – развертка; б – отклонение от плоскости торца рупора
Из-за того, что боковые грани расходятся под углом, торец рупора получился неплоским, что видно из рис. 1.45, б. Для устранения этого недостатка торец надо подрезать. Для этого на той же рабочей плоскости,
43
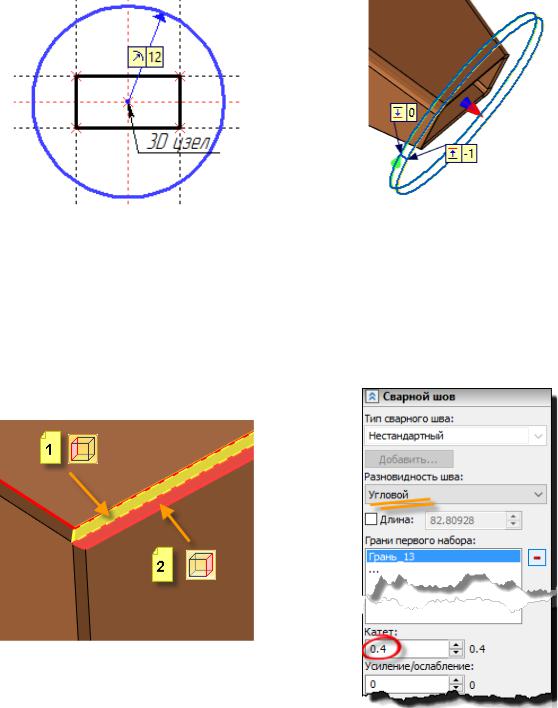
с которой мы начинали создание рупора (это была плоскость Вид слева), надо создать окружность, показанную на рис. 1.46, а. Полученный 3D профиль выталкивается в сторону от тела с включенной опцией Вычита-
ние.
Для привязки рупора при выполнении сборки, на той же плоскости создайте 3D узел, показанный на рис.1.46, а. К нему надо привязать локальную систему координат.
а) |
б) |
Рис. 1.46 – Подрезка торца: а – порядок действий; б – параметры
Осталось смоделировать соединение пайкой в месте стыковки граней рупора (рис. 1.47). Для этого воспользуемся командой ГМ: Сбор-
ка/Сборка/Сварной шов  .
.
а) |
б) |
Рис. 1.47 – Модель паяного шва: а – порядок действий; б – параметры
44