

3.2 Критерий Рауса
Для определения устойчивости замкнутой системы воспользуемся критерием Рауса. Для формулировки этого критерия используется таблица Рауса (рисунок 10).
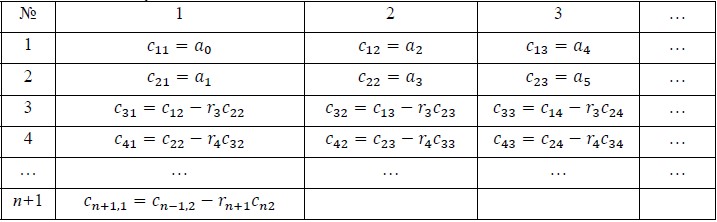
Рисунок 10 – Коэффициенты таблицы Рауса
В первой строке выписываются коэффициенты характеристического полинома с четными индексами, а во второй строке – коэффициенты с нечетными индексами в порядке их возрастания. Элементы последующих строк вычисляются по формулам:
 ;
;
 ;
;
 ;
;

Составим таблицу Рауса для рассматриваемой системы в замкнутом состоянии. Передаточная функция такой системы получена в пункте 1 и имеет следующий вид:
Коэффициенты полинома приведены в таблице 3.
Таблица 3
а0 |
а1 |
а2 |
а3 |
0,5 |
3.04 |
30 |
60 |
Найдем значения коэффициентов таблицы Рауса, используя программу на рисунке 11.
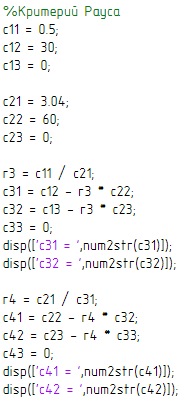
Рисунок 11 – Программа для нахождения недостающих коэффициентов таблицы Рауса
В результате работы программы получаем значения, показанные на рисунке 12.

Рисунок 12 – Найденные неизвестные коэффициенты таблицы Рауса
Заполним таблицу Рауса (таблица 4) согласно рисунку 10, используя найденные коэффициенты полинома (рисунок 12):
Таблица 4
№ |
1 |
2 |
3 |
1 |
0,5 |
30 |
0 |
2 |
3,04 |
60 |
0 |
3 |
20,1316 |
0 |
0 |
4 |
60 |
0 |
0 |
Согласно критерию Рауса, чтобы система была устойчива, необходимо и достаточно, чтобы все элементы первого столбца таблицы Рауса были положительны. В данном случае, критерий Рауса выполняется, поэтому система является устойчивой.
3.3 Критерий Михайлова
Определим устойчивость замкнутой системы с использованием критерия Михайлова. Запишем ещё раз передаточные функции, полученные в пункте 1.
Передаточная функция замкнутой системы:
Для того чтобы получить кривую Михайлова, используем программу, показанную на рисунке 13:

Рисунок 13 – Программа для построения кривой Михайлова
В командном окне получаем следующие значения:
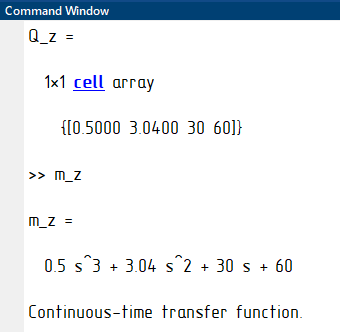
Рисунок 14 – Результат работы программы в MATLAB для построения кривой Михайлова
На рисунке 15 представлена кривая Михайлова для замкнутой системы.

Рисунок 15 – Кривая Михайлова для замкнутой системы
Из рисунка 15 следует, что критерий Михайлова выполняется, так как кривая Михайлова начинается на положительной вещественной полуоси и обходит 3 квадранта на комплексной плоскости против часовой стрелки. Следовательно, замкнутая система устойчива.
3.4 Критерий Найквиста
Согласно
критерию устойчивости Найквиста, для
того, чтобы замкнутая система управления
с отрицательной обратной связью была
устойчива, необходимо и достаточно,
чтобы разность между положительными и
отрицательными переходами АФЧХ замкнутой
системы отрезка вещественной оси ( )
была равна
)
была равна
 (где
(где
 – число правых корней характеристического
уравнения замкнутой системы). Для
построения АФЧХ в MATLAB используется
функция nyquist.
Чтобы найти корни характеристического
уравнения, воспользуемся функцией pole.
– число правых корней характеристического
уравнения замкнутой системы). Для
построения АФЧХ в MATLAB используется
функция nyquist.
Чтобы найти корни характеристического
уравнения, воспользуемся функцией pole.
Программа для построения АФЧХ системы и для нахождения полюсов передаточной функции приведён на рисунке 16.
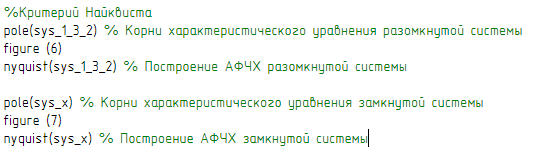
Рисунок 16 – Программа для построения АФЧХ и нахождения корней
А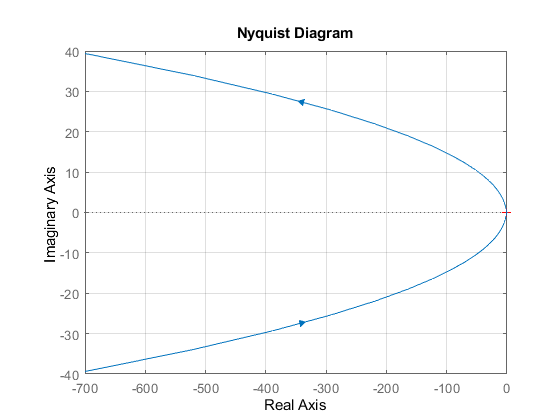
 ФЧХ
разомкнутой системы приведена на рисунке
17, АФЧХ замкнутой системы – на рисунке
18.
ФЧХ
разомкнутой системы приведена на рисунке
17, АФЧХ замкнутой системы – на рисунке
18.
Рисунок 17 – АФЧХ разомкнутой системы
Рисунок 18 – АФЧХ замкнутой системы
З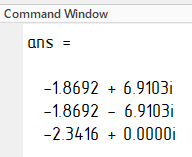
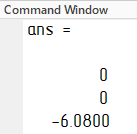 начения
корней характеристического полинома
для разомкнутой системы (слева) и
замкнутой системы (справа) представлены
на рисунке 19.
начения
корней характеристического полинома
для разомкнутой системы (слева) и
замкнутой системы (справа) представлены
на рисунке 19.
Рисунок 19 - Корни характеристического полинома
Так
как вещественные части всех корней
отрицательные, то число правых корней
равно нулю
 .
На отрезке (
)
нет
ни положительных, ни отрицательных
переходов. Следовательно, согласно
критерию Найквиста и разомкнутая, и
замкнутая система является устойчивой.
.
На отрезке (
)
нет
ни положительных, ни отрицательных
переходов. Следовательно, согласно
критерию Найквиста и разомкнутая, и
замкнутая система является устойчивой.
Вывод
В ходе выполнения домашнего задания были найдены передаточные функции для заданной системы с разомкнутой и замкнутой обратной связью, были получены графики ЛАЧХ и ЛФЧХ, а также переходной и импульсной переходной характеристик. Также для исходной системы было определено, что система является устойчивой по всем рассмотренным критериям: Гурвица, Рауса, Михайлова и Найквиста.
Список использованной литературы
Управление в технических системах: учебник / Н. П. Деменков, Е. А. Микрин. — Москва: Издательство МГТУ им. Н.Э. Баумана, 2017. —452 с.: ил. ISBN 978-5-7038-4661-2. [Электронный источник] (дата обращения 17.11.2023 г.) Ссылка: https://bmstu.press/catalog/item/5057/
Ким Д. П. Теория автоматического управления. Т. 1. Линейные системы — 2-е изд., испр. и доп. — М.: ФИЗМАТЛИТ, 2016. — 312 с.
Ким Д. П. Теория автоматического управления. Т. 2. Многомерные, нелинейные, оптимальные и адаптивные системы — 2-е изд., испр. и доп. — М.: ФИЗМАТЛИТ, 2016. — 440 с.