

Федеральное агентство железнодорожного транспорта
Федеральное государственное образовательное учреждение
высшего профессионального образования
«ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Г.И.Тихомиров
КУРСОВОЕ ПРОЕКТИРОВАНИЕ
ПО ДЕТАЛЯМ МАШИН И ОСНОВАМ КОНСТРУИРОВАНИЯ
С ИСПОЛЬЗОВАНИЕМ КОМЬЮТЕРНЫХ ТЕХНОЛОГИЙ
ЧАСТЬ I
РАСЧЕТ, ВЫБОР И ВЫПОЛНЕНИЕ ЧЕРТЕЖЕЙ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОГО ПРИВОДА МАШИН И МЕХАНИЗМОВ
Учебное пособие
САНКТ-ПЕТЕРБУРГ
ПГУПС
2012
ВВЕДЕНИЕ
В механических приводах манипуляторов, машин, механизмов, применяемых для ремонта и эксплуатации подвижного состава и строительства железнодорожного пути с целью повышения его провозной и пропускной способности используются различные детали, узлы (электродвигатели, муфты, редукторы, открытые передачи, валы, оси, опоры вращения – подшипники и т.д.).
Для уменьшения затрат на ремонт, обслуживание, эксплуатацию единиц подвижного состава, железнодорожных машин необходимо на стадии их создания применять современные алгоритмы и методики расчета с использованием автоматизированных программ проектирования КОМПАС – ЗD.
В большинстве библиографических источников (книг, методических пособий, методических указаний) особенно для студентов заочного (традиционного) обучения и широко распространяемого в последнее время дистанционного (с ограниченными возможностями по времени посещения занятий), вопросам автоматизированного проектирования уделяется недостаточное внимание, и студенты испытывают определенные трудности.
В предлагаемом учебном пособии частично восполняется указанный пробел.
В работе достаточно подробно многочисленными примерами выполнения конкретных заданий курсовых проектов для студентов заочников различных специальностей представлены алгоритмы и методики автоматизированного расчета и выполнения чертежей деталей и узлов машин и механизмов железнодорожного транспорта.
УДК 621.81
ББК 34.42
Ш75
Тихомиров Г.И.
Ш 75 Курсовое проектирование по деталям машин и основам конструирования с использованием компьютерных технологий. Часть I. Расчет, выбор и выполнение чертежей элементов механического привода машин и механизмов: учеб. пособие / Г.И.Тихомиров. – СПб.: Петербургский государственный университет путей сообщения, 2012. – 60с.
В пособие приведены примеры расчетов зубчатых и гибких передач, опор вращения, графического построения чертежей кинематической и компоновочных схем редуктора.
Предназначено для студентов разных технических специальностей и всех видов обучения при изучении дисциплины «Детали машин и основы конструирования» и при выполнении курсового и дипломного проектирования.
УДК 621.81
ББК 34.42
Тихомиров Г.И.,2012
Петербургский государственный
университет путей сообщения, 2012
Выполнение чертежа кинематической схемы механического привода.
Принципиальная кинематическая схема— это такая схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины (например, шпинделю станка, режущему инструменту, ведущим колёсам автомобиля и др.) и их взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения (зубчатые колёса, ходовые винты, валы, шкивы, муфты и др.) без соблюдения размеров и пропорций.
Нормативные документы
Стандарты, регламентирующие условные обозначения и выполнение кинематических схем:
ГОСТ 2.770-68 (2000) ЕСКД. Обозначения условные графические на схемах. Элементы кинематики.
ГОСТ 2.703-68. ЕСКД. Правила выполнения кинематических схем.
ISO 3952 Kinematic diagrams — Graphical symbols.
Все детали (звенья) на кинематических схемах изображают условно в виде графических символов (ГОСТ 2.770-68 (2000)), которые лишь раскрывают принцип их работы.
На кинематической схеме разрешается изображать отдельные элементы схем других видов, которые непосредственно влияют на их работу (например, электрические или гидравлические).
Взаимное расположение звеньев на кинематической схеме должно соответствовать начальному, среднему или рабочему положению исполнительных органов механизма или машины. На кинематической схеме звеньям присваивают номера в порядке передачи движения, начиная от двигателя. Валы номеруют римскими цифрами, остальные элементы — арабскими. Порядковый номер элемента проставляют на полочке выносной линии. Под полочкой указывают основные характеристики и параметры кинематического звена.
На кинематических схемах валы, оси, стержни изображают сплошными основными линиями; зубчатые колёса, червяки, звёздочки, шкивы, кулачки — сплошными тонкими линиями.
Для создания кинематической схемы механического привода машины откроем программу КОМПАСи создадим новый документ.
Нажимаем ФАЙЛна панели управления и создаем новый документСОЗДАТЬ… (Рис.1.1)

Рис.1.1. Создание документа.
В окне нового документа выбираем чертёж и нажимаем ОК(Рис.1.2):

Рис.1.2. Новый документ.
После чего система создает лист формата А4вертикальной ориентации с типом основной надписи (Рис.1.3):

Рис.1.3. Новый лист.
Затем открываем
БИБЛИОТЕКУЭЛЕМЕНТОВКИНЕМАТИЧЕСКИХСХЕМпри помощиМЕНЕДЖЕРАБИБЛИОТЕК![]() ,
который находится на панели управления.
Внизу появляется окно(рис.1.4):
,
который находится на панели управления.
Внизу появляется окно(рис.1.4):
![]()
Рис.1.4. Менеджер библиотек.
Находим и открываем папку МАШИНОСТРОЕНИЕ, в которой находится нужная нам библиотека(Рис.1.5):
![]()
Рис.1.5. Машиностроение.
Для запуска нужной нам БИБЛИОТЕКИщелкаем по ней левой кнопкой мыши (лкм) дважды. При этом происходит раскрытие её содержания (Рис.1.6):

Рис.1.6. Библиотека элементов кинематических схем.
В БИБЛИОТЕКЕимеются папки с различными схемами, которые нужны для построения. Установим механизм, который будет задавать движение. Зайдем в папкуМЕХАНИЗМЫ. Там на выбор откроются подпапкиМЕХАНИЗМЫМАЛЬТИЙСКИЕ,МЕХАНИЗМЫХРАПОВЫЕи другие (Рис.1.7):

Рис.1.7.Механизмы.
Выберем интересующий нас механизм и устанавливаем его на нашей схеме (Рис.1.8):

Рис.1.8. Приводной двигатель.
Далее выбираем муфту. В папке МУФТЫесть много разновидностей, включая автоматические и сцепляемые. По заданию –УПРУГАЯВТУЛОЧНО-ПАЛЬЦЕВАЯМУФТА(Рис.1.9):

Рис.1.9. Муфта приводная.
За муфтой находится цилиндрический редуктор с косозубой передачей. Его можно найти в папке ПЕРЕДАЧИ. Подшипники, находящиеся на валу, находим в папкеПОДШИПНИКИ. Выбираем передаточный механизм (редуктор), подшипники и получаем (Рис.1.10):

Рис.1.10. Цилиндрическая косозубая передача.
Имеем
закрытую передачу – РЕДУКТОР.Закрытие осуществляем с помощью обычногоОТРЕЗКА![]() .
Для этого выбираем наПАНЕЛИИНСТРУМЕНТОВзначокГЕОМЕТРИЯ
.
Для этого выбираем наПАНЕЛИИНСТРУМЕНТОВзначокГЕОМЕТРИЯ![]() и затем кликаем на кнопкуОТРЕЗОК.
Внизу окна, наПАНЕЛИСВОЙСТВпоявляются настройкиОТРЕЗКА, к
которым можно указатьДЛИНУ,УГОЛ,СТИЛЬиКООРДИНАТЫ(Рис.1.11):
и затем кликаем на кнопкуОТРЕЗОК.
Внизу окна, наПАНЕЛИСВОЙСТВпоявляются настройкиОТРЕЗКА, к
которым можно указатьДЛИНУ,УГОЛ,СТИЛЬиКООРДИНАТЫ(Рис.1.11):
![]()
Рис.1.11. Панель инструментов.
При помощи ОТРЕЗКАдочертим корпус редуктора самостоятельно(Рис.1.12):

Рис.1.12. Редуктор цилиндрический с косозубой передачей.
ОТКРЫТУЮПРЯМОЗУБУЮЦИЛИНДРИЧЕСКУЮПЕРЕДАЧУнайдём в папкеПЕРЕДАЧИ (Рис.1.13):

Рис.1.13. Открытая прямозубая цилиндрическая передача.
Колеса механизма передвижения и рельсы по которым они будут ездить начертим самостоятельно, так как библиотеки не имеют таких деталей. С помощью команды ОТРЕЗОКначертим ось, на которой будут располагаться колеса мостового крана (Рис.1.14):

Рис.1.14. Ось колес мостового крана.
А затем и сами колёса мостового крана (Рис.1.15):

Рис.1.15. Колеса мостового крана.
Ниже изображаем рельсы (Рис.1.16):-

Рис.1.16. Рельсы мостового крана.
И в завершении устанавливаем по подшипнику на каждом колесе(Рис.1.17):
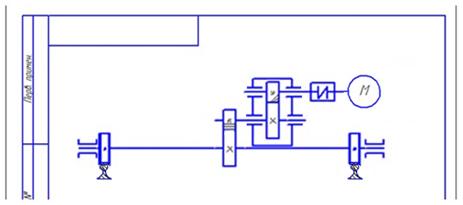
Рис.1.17. Установка подшипников.
Укажем
позиции и исходные данные. Для указания
позиций воспользуемся командой
ОБОЗНАЧЕНИЕДЛЯСТРОИТЕЛЬСТВА![]() . В ней найдем функциюМАРКА/ПОЗИЦИОННОЕОБОЗНАЧЕНИЕСЛИНИЕЙ-ВЫНОСКОЙ
. В ней найдем функциюМАРКА/ПОЗИЦИОННОЕОБОЗНАЧЕНИЕСЛИНИЕЙ-ВЫНОСКОЙ![]() .
Расставим обозначения в соответствии
со схемой (Рис.1.18):
.
Расставим обозначения в соответствии
со схемой (Рис.1.18):

Рис.1.18. Позиционные обозначения.
Для ввода обозначений на панели управления ИСТРУМЕНТЫвыберемВВОДТЕКСТАи выберем поле для ввода текста. Для ввода таблицы на той же панели управления выберемВВОДТАБЛИЦЫ. И укажем место, где она будет располагаться. Далее указываем число строк и столбцов, так же их ширину и высоту, и нажимаемОК (Рис.1.19). Заполняем таблицу, а так же заполняем основную надпись и получаем готовую кинематическую схему:

Рис.1.19. Чертеж кинематической схемы привода механизма передвижения мостового крана.